Sinclair Gurny
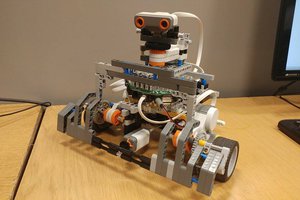
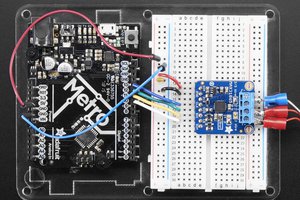
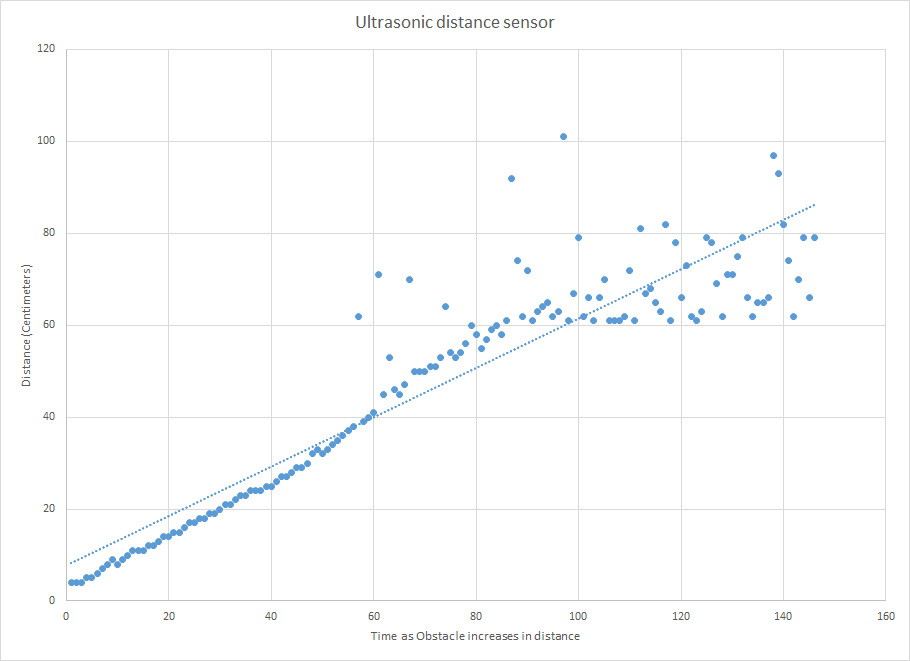
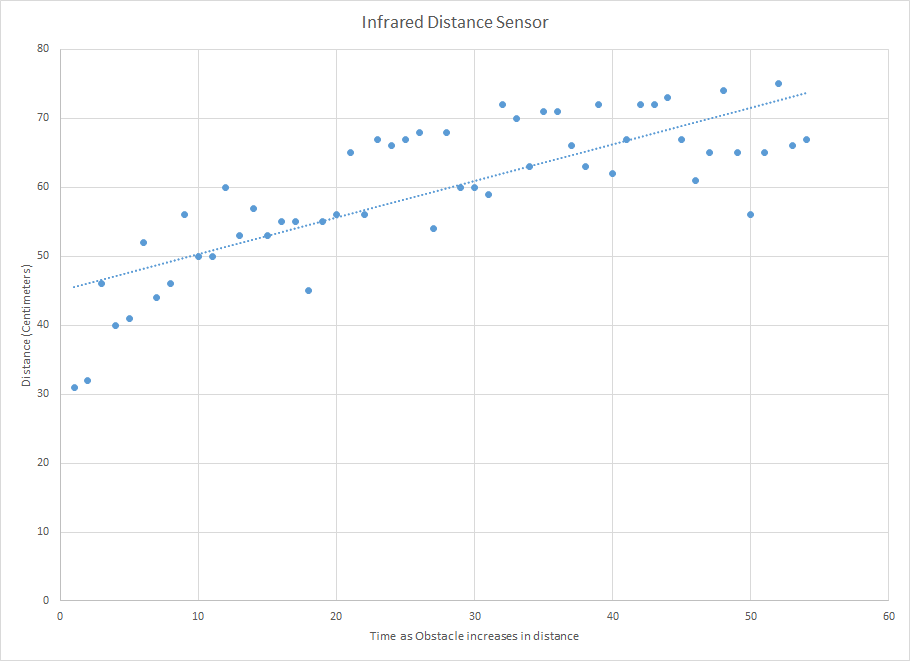
Sinclair GurnyA raspberry pi based robot AKA Shaky that can detect obstacles and navigate around them. It is meant to follow walls. It uses three ultrasonic distance sensors and two infrared distance sensors. An Arduino Uno manages the sensor reading, Robot Operating System (ROS) handles the control system.
0%
0%
Wall Following and Obstacle Avoidance
Raspberry Pi 3B based robot, distance sensors, and ROS.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Kenny.Industries
Kenny.Industries