 Sinclair Gurny
Sinclair Gurny
Sensor Accuracy Test
I performed a test of sensor accuracy and precision. The test placed the sensor on the stationary robot. A reference object, a large flat object, was placed in front of the sensor and slowly moved away from the sensor at a nearly constant rate. The sensor values were recorded and graphed. A linear trendline and R^2 values were calculated to measure the accuracy. This test shows the error in measuring the distance and the accurate range of each sensor.
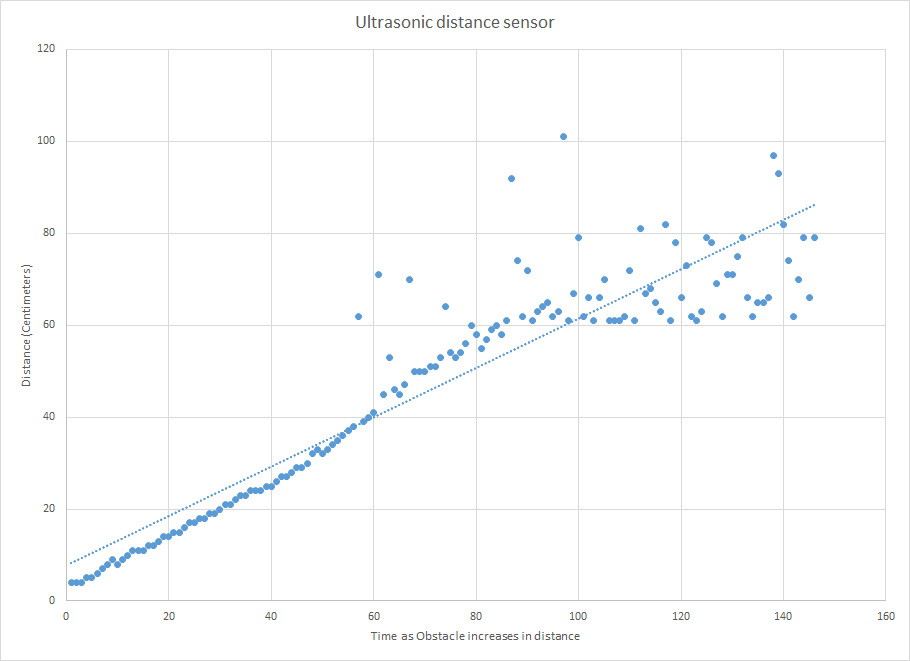
The results show that the sonar sensor (Figure 1) was nearly perfectly accurate up to a distance of 60 cm. After 60 cm the error rate increased, possibly due to several reasons: receiving some interference from the environment or the sensor was receiving pulses that bounced off of things other than the reference object. The trendline equation y=0.5376*x+7.688, and the R^2 value was 0.855 which shows a fairly accurate sensor overall.
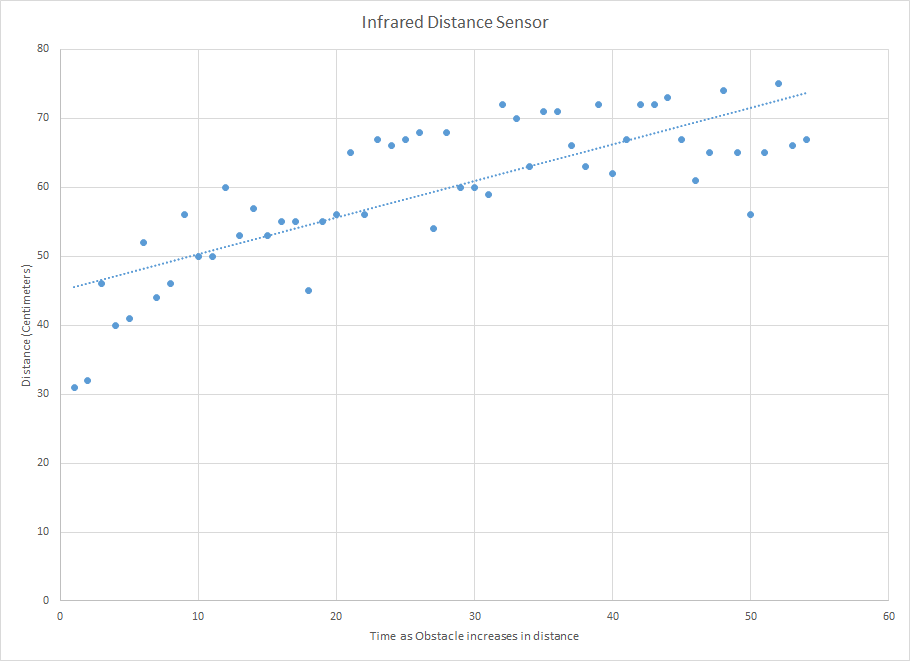
Figure 2 shows the accuracy of the IR sensors, which is much worse than the sonar sensor. Low end values were not read accurately the minimum was much higher than the supposed minimum of 10 cm, and the error is very large taking into account the smaller range which the IR sensor works in. The trendline equation is y=0.5311*x+45.061 and the R^2 is 0.6259, which shows less accuracy than the sonar sensor.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.