GOALS AND INITIAL INFORMATION:
Principle: keep it simple, keep it quite cheap,
Priority: getting it to goal destination
Distance ~60 km
Max time (draft): 48 hours,
Weather: as good as possible (in this case it can be chosen as the timespan should be quite short)
REQUIREMENTS:
Speed requirement at slowest: 60 km / 48 hours = 1,25 km / hour -> 0,347 m / second
nickname: "tms" (in Umea hacklab IRC): solar panel + Li-Ion battery + styrofoam + electric motor (BLDC) + prop + rudder + linear motor + teensy + gps module
Initial battery power requirement:
Type: LiFePO4, energy density (for a ready to use product with all mass of the module) ~100 Wh/kg
In case 500 Wh battery is needed:
-> Takes 5 kg.
Feel free to join this project in case you want to share something related to autonomous boats.
Raw material draft listing for initial planning:
Boat base material could be for example: https://www.byggmax.fi/perustukset-ja-valu/eristeet/eristyslevy-finnfoam-p16445
Weight requirement: under 15 kg everything ? This can be adjusted just a littlebit higher but still that it can be carried in hands.
Size requirement: average car's trunk so it can be carried.
500 kg boat (total mass assumed in this thinking) needs at least 120 W according to that: https://www.amazon.de/ZEBCO-RHINO-COBOLD-ELEKTROBOOTSMOTOR-Modell/dp/B0012NOISO
So if boat is up to 15 kg with same equation a motor something like that should be enough:
500 kg / 120 W = 4,1667 kg / W
Therefore, for up to 15 kg boat the size of the motor:
15 kg / 4,1667 kg / W = ~3,6 W
Therefore component prices for electronics should stay quite low according to eBay-listings. Also no sense to get big speed for the boat as it wastes energy.
Some problems to solve: how to get the actual (generic BLDC or RC boat motor or what) motor to run a propeller that creates the thrust?
(POSSIBLE) TEST AREA:
Test area could be Karperöjärvi, Mustasaari/Vaasa (good quadcopter video gives view of the area:)
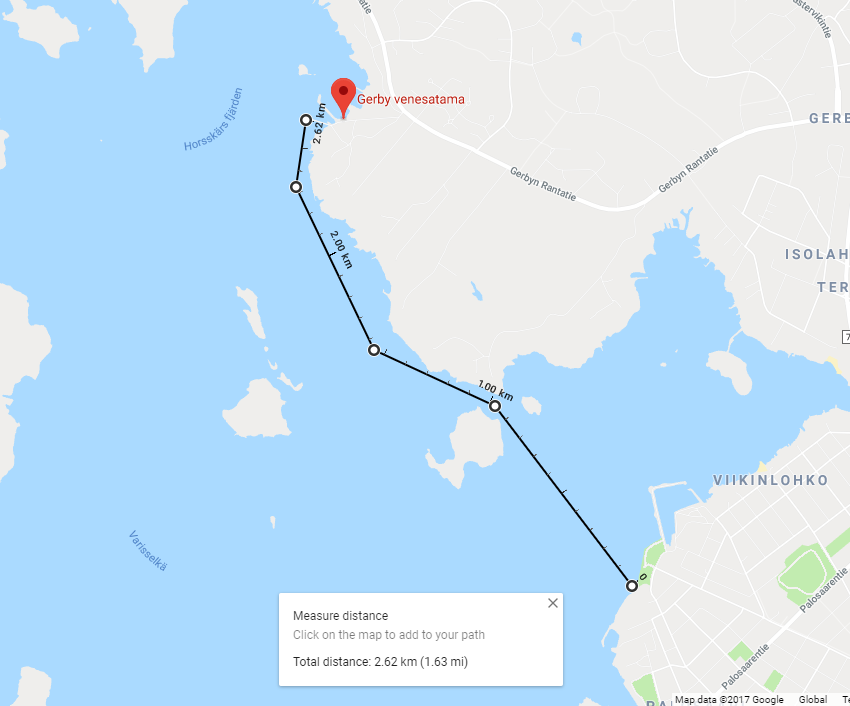
At later stage tests can be done in actual sea environment around city of Vaasa. For example from Gerby boat harbor to Palosaari (current Vaasa Hacklab location) to see how the boat manages in little wavier water. This distance is around 2,6 km and quite near beach and roads so in case of problems things can be managed relatively well:

 Bud Bennett
Bud Bennett
 Peter Buckley
Peter Buckley
 Nolan Hergert
Nolan Hergert
 Rory
Rory