jlbrian7
jlbrian7-
x10 tm4c123gxl
12/24/2017 at 11:44 • 0 commentsSince I now have a cheap 433MHz transmitter, which I took out of the remote, I hooked it up to my tm4c123gxl in order to test my code.
//***************************************************************************** // // blinky.c - Simple example to blink the on-board LED. // // Copyright (c) 2012-2016 Texas Instruments Incorporated. All rights reserved. // Software License Agreement // // Texas Instruments (TI) is supplying this software for use solely and // exclusively on TI's microcontroller products. The software is owned by // TI and/or its suppliers, and is protected under applicable copyright // laws. You may not combine this software with "viral" open-source // software in order to form a larger program. // // THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS. // NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT // NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR // A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY // CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL // DAMAGES, FOR ANY REASON WHATSOEVER. // // This is part of revision 2.1.3.156 of the EK-TM4C123GXL Firmware Package. // //***************************************************************************** #include <stdint.h> #include <stdbool.h> #include <stdlib.h> #include "inc/hw_memmap.h" #include "driverlib/gpio.h" #include "driverlib/sysctl.h" #include "driverlib/rom.h" #define ON 0x00 #define OFF 0x20 #define BRIGHT 0x88 #define DIM 0x98 #define X10_RF_SB_LONG 8960 // Start burts (leader) = 9ms #define X10_RF_SB_SHORT 4500 // Start silecence (leader) = 4,5 ms #define X10_RF_BIT_LONG 1120 // Bit 1 pulse length #define X10_RF_BIT_SHORT 560 // Bit 1 pulse length #define X10_RF_GAP 40000 // Length between commands #define bitRead(value, bit) (((value) >> (bit)) & 0x01) #define bitSet(value, bit) ((value) |= (1UL << (bit))) #define bitClear(value, bit) ((value) &= ~(1UL << (bit))) #define bitWrite(value, bit, bitvalue) (bitvalue ? bitSet(value, bit) : bitClear(value, bit)) void x10Switch(char house_code, uint8_t unit_code, uint8_t command); void SendCommand(uint8_t *data, uint8_t size); void SendX10RfByte(uint8_t data); void SendX10RfBit(unsigned int databit); void SEND_HIGH(); void SEND_LOW(); uint8_t _rf_repeats = 5; void delayUS(uint32_t us) { ROM_SysCtlDelay( (ROM_SysCtlClockGet()/(3*1000*1000))*us ) ; // more accurate } int main(void) { volatile uint32_t ui32Loop; //80Mhz //ROM_SysCtlClockSet(SYSCTL_SYSDIV_2_5 | SYSCTL_USE_PLL | SYSCTL_OSC_MAIN | SYSCTL_XTAL_16MHZ); // // Enable the GPIO port that is used for the on-board LED. // SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOF); // port used for the transmitter SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB); // // Check if the peripheral access is enabled. // while(!SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOF)) { } // // Enable the GPIO pin for the LED (PF3). Set the direction as output, and // enable the GPIO pin for digital function. // GPIOPinTypeGPIOOutput(GPIO_PORTF_BASE, GPIO_PIN_3); //enable GPIOPinTypeGPIOOutput(GPIO_PORTB_BASE, GPIO_PIN_0); GPIOPinWrite(GPIO_PORTB_BASE, GPIO_PIN_0, GPIO_PIN_0); //signal GPIOPinTypeGPIOOutput(GPIO_PORTB_BASE, GPIO_PIN_5); // // Loop forever. // while(1) { /*// // Turn on the LED. // GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_3, GPIO_PIN_3); // // Delay for a bit. // for(ui32Loop = 0; ui32Loop < 200000; ui32Loop++) { } // // Turn off the LED. // GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_3, 0x0); // // Delay for a bit. // for(ui32Loop = 0; ui32Loop < 200000; ui32Loop++) { }*/ x10Switch('A', 2, ON); // Switch A1 On delayUS(3000000); x10Switch('A', 2, ON); // Switch A1 On delayUS(3000000); } } void x10Switch(char house_code, uint8_t unit_code, uint8_t command){ uint8_t x10buff[4]; // Set message buffer 4 bytes switch(house_code) { case 'A': x10buff[0] = 0b0110; break; case 'B': x10buff[0] = 0b0111; break; case 'C': x10buff[0] = 0b0100; break; case 'D': x10buff[0] = 0b0101; break; case 'E': x10buff[0] = 0b1000; break; case 'F': x10buff[0] = 0b1001; break; case 'G': x10buff[0] = 0b1010; break; case 'H': x10buff[0] = 0b1011; break; case 'I': x10buff[0] = 0b1110; break; case 'J': x10buff[0] = 0b1111; break; case 'K': x10buff[0] = 0b1100; break; case 'L': x10buff[0] = 0b1101; break; case 'M': x10buff[0] = 0b0000; break; case 'N': x10buff[0] = 0b0001; break; case 'O': x10buff[0] = 0b0010; break; case 'P': x10buff[0] = 0b0011; break; default: x10buff[0] = 0; break; } x10buff[0] = x10buff[0] << 4; // House code goes into the upper nibble x10buff[2] = command; /*switch(command) { case ON: case OFF: case BRIGHT: case DIM: }*/ // Set unit number unit_code = unit_code - 1; bitWrite(x10buff[2],6,bitRead(unit_code,2)); bitWrite(x10buff[2],3,bitRead(unit_code,1)); bitWrite(x10buff[2],4,bitRead(unit_code,0)); bitWrite(x10buff[0],2,bitRead(unit_code,3)); // Set parity x10buff[1] = ~x10buff[0]; x10buff[3] = ~x10buff[2]; SendCommand(x10buff, sizeof(x10buff)); } void SendCommand(uint8_t *data, uint8_t size){ uint8_t i = 0; int j = 0; GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_3, GPIO_PIN_3); for(i = 0; i < _rf_repeats; i++){ SEND_HIGH(); delayUS(X10_RF_SB_LONG); SEND_LOW(); delayUS(X10_RF_SB_SHORT); for(j=0; j <= size; j++) { SendX10RfByte(data[j]); } SendX10RfBit(1); delayUS(X10_RF_GAP); } GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_3, 0x0); } void SendX10RfByte(uint8_t data){ int i = 0; //Serial.println("\n"); for(i=7; i >= 0; i--){ // send bits from byte SendX10RfBit((bitRead(data,i)==1)); //Serial.print(bitRead(data,i)); } } void SendX10RfBit(unsigned int databit){ SEND_HIGH(); delayUS(X10_RF_BIT_SHORT); SEND_LOW(); delayUS(X10_RF_BIT_SHORT); if (databit){ delayUS(X10_RF_BIT_LONG); } } void SEND_HIGH() { GPIOPinWrite(GPIO_PORTB_BASE, GPIO_PIN_5, GPIO_PIN_5); } void SEND_LOW(){ GPIOPinWrite(GPIO_PORTB_BASE, GPIO_PIN_5, 0x0); }This code, and the transmitter from the remote had the light flashing on and off just as expected.
So, back to figuring out what I am doing wrong with the radio.
-
x10 Arduino Code
12/24/2017 at 11:39 • 0 commentsx10 library from here:
https://github.com/pyrou/X10RF-Arduino
there were a couple of bugs, but the biggest problem is that I don't have the radio communicating yet.
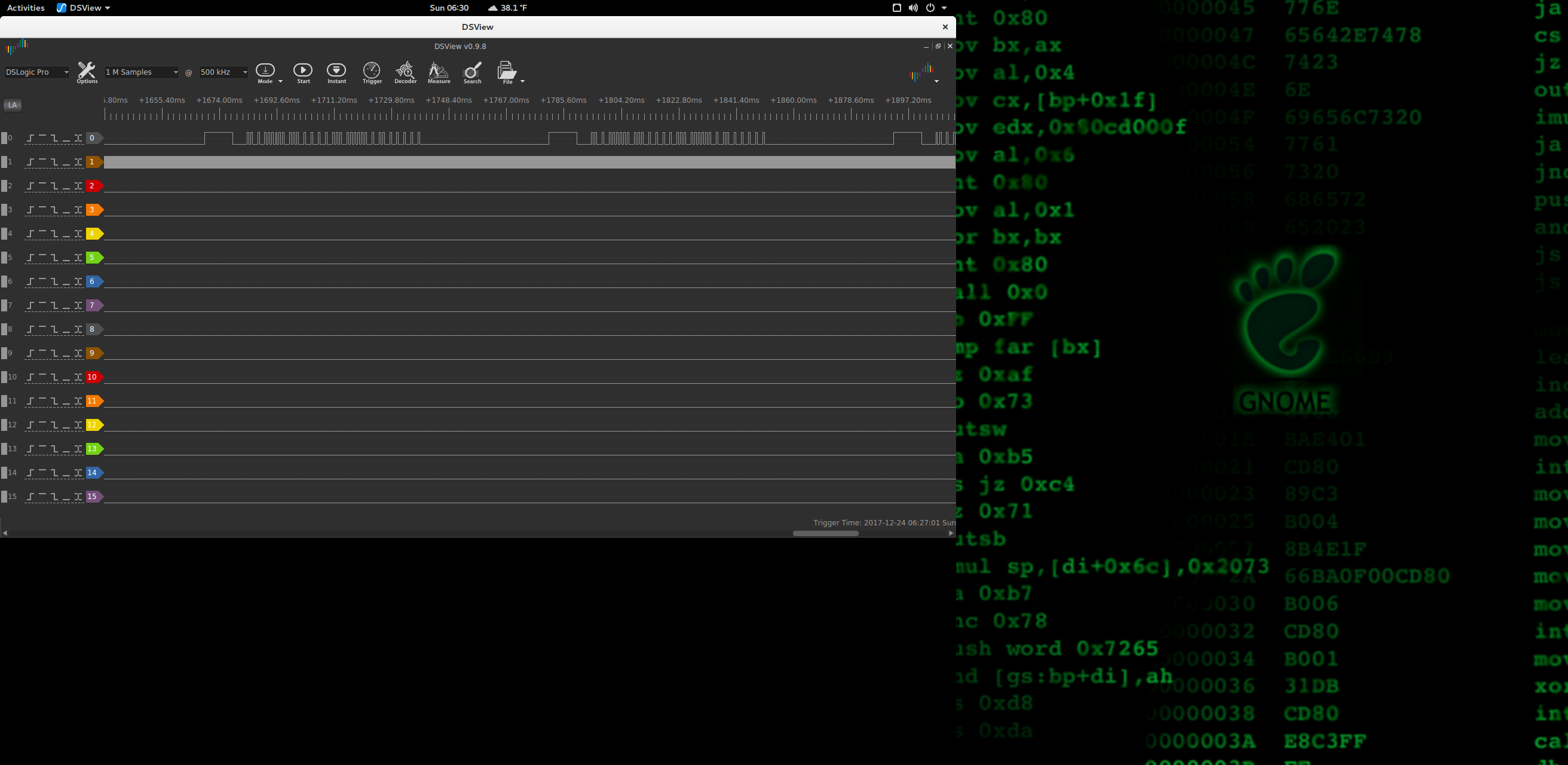
#include <SPI.h> #include <RH_RF95.h> #include <x10rf.h> /* for feather32u4 */ #define RFM95_CS 8 #define RFM95_RST 4 #define RFM95_INT 7 #define tx 2 // Pin number for the 433mhz OOK transmitter #define reps 5 // Number of times that a RF command must be repeated. #define clkpin 3 #define ledpin 13 //BLUE_LED // Pin for the led that blinks when a command is send. (0 = no blink) // Change to 434.0 or other frequency, must match RX's freq! #define RF95_FREQ 433.96 #define ON 0x00 #define OFF 0x20 #define BRIGHT 0x88 #define DIM 0x98 // Singleton instance of the radio driver RH_RF95 rf95(RFM95_CS, RFM95_INT); x10rf myx10 = x10rf(tx,clkpin,ledpin,reps); void setup() { myx10.begin(); pinMode(RFM95_RST, OUTPUT); digitalWrite(RFM95_RST, HIGH); while (!Serial); Serial.begin(9600); delay(100); Serial.println("Feather LoRa Radio Test FSK/OOK Mode!"); // manual reset digitalWrite(RFM95_RST, LOW); delay(10); digitalWrite(RFM95_RST, HIGH); delay(10); while (!rf95.init()) { Serial.println("LoRa radio init failed"); while (1); } Serial.println("LoRa radio init OK!"); if (!rf95.setFrequency(RF95_FREQ)) { Serial.println("setFrequency failed"); while (1); } Serial.print("Set Freq to: "); Serial.println(RF95_FREQ); rf95.setTxPower(23, false); rf95.spiWriteRegister(RH_RF95_REG_01_OP_MODE, 0x00); rf95.spiWriteRegister(RH_RF95_REG_01_OP_MODE, 0x0B); //rf95.spiWriteRegister(RH_RF95_REG_40_DIO_MAPPING1, RH_RF95_DIO_0_2); rf95.spiWriteRegister(RH_RF95_REG_30_PACKET_CONFIG_1, 0x80); rf95.spiWriteRegister(RH_RF95_REG_31_PACKET_CONFIG_2, RH_RF95_DATA_MODE_CONT); Serial.println(rf95.spiReadRegister(RH_RF95_REG_01_OP_MODE), HEX); Serial.println(rf95.spiReadRegister(RH_RF95_REG_30_PACKET_CONFIG_1), HEX); Serial.println(rf95.spiReadRegister(RH_RF95_REG_31_PACKET_CONFIG_2), HEX); Serial.println(rf95.spiReadRegister(RH_RF95_REG_40_DIO_MAPPING1), HEX); } void loop() { myx10.x10Switch('A', 1, ON); // Switch D15 off Serial.println("A1: On"); //Serial.println(rf95.spiReadRegister(RH_RF95_REG_3E_IRQ_FLAGS_1), BIN); /*uint8_t tempVal = rf95.spiReadRegister(RH_RF95_REG_3C_TEMP); int temp = tempVal & 0x7F; if ((tempVal & 0x80) == 0x80){ temp *= -1; } Serial.println(temp);*/ delay(3000); myx10.x10Switch('A', 1, OFF); // Switch D15 off Serial.println("A1: Off"); delay(3000); }Data out to radio, and clock signal from radio being in continuous mode:
![]()
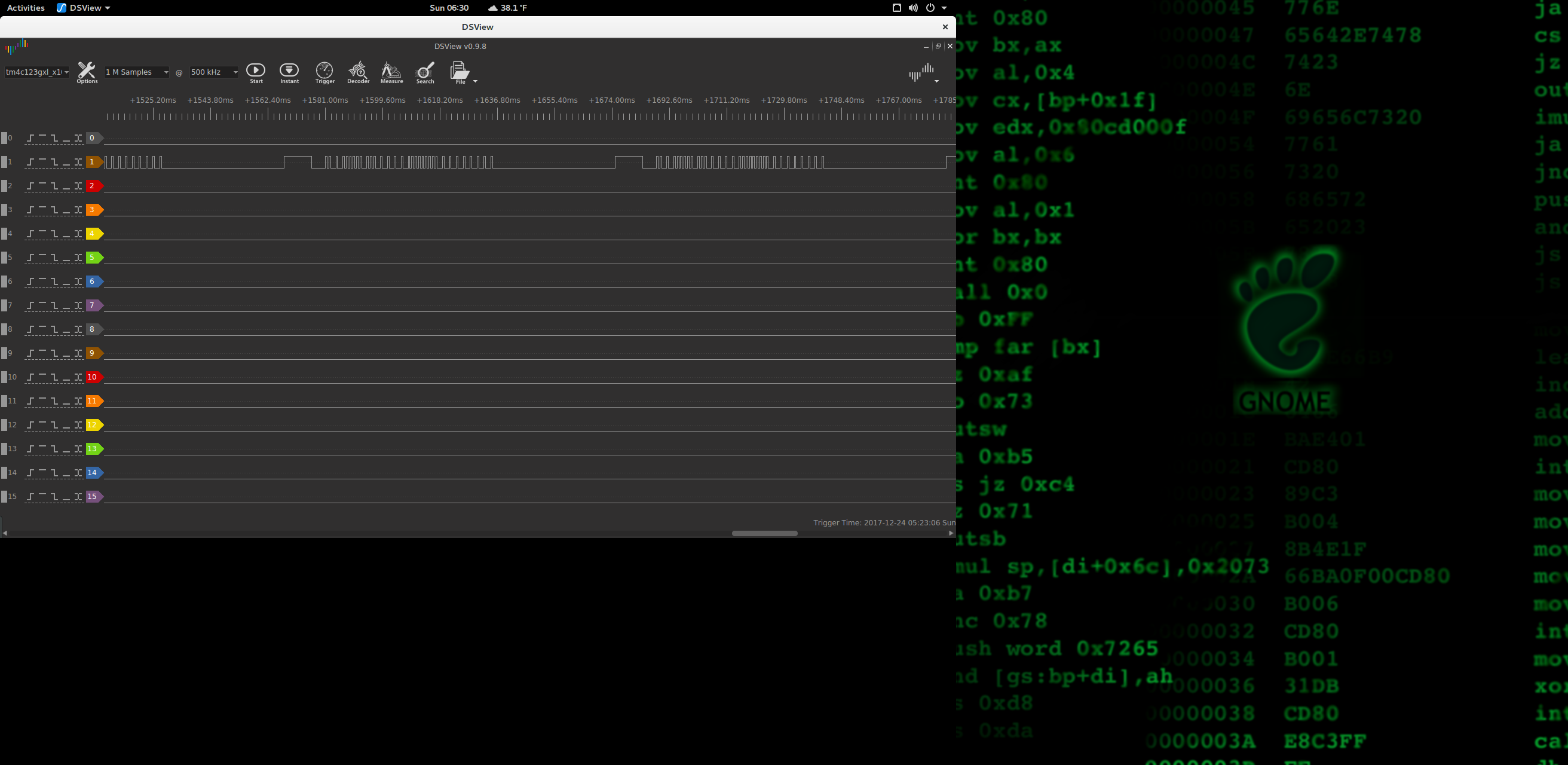
The signal out looks correct, compared to this, which is taken directly from an x10 remote:
![]()
I removed the RF transmitter from the remote, and hooked up the logic analyzer to the pins where the transmitter was in order to check what I was doing against something known and good.
RH_RF95
added the registers and a couple of functions so that FSK/OOK can be used on the Feather 32u4 w/ 433MHz LoRa radio