0%
0%
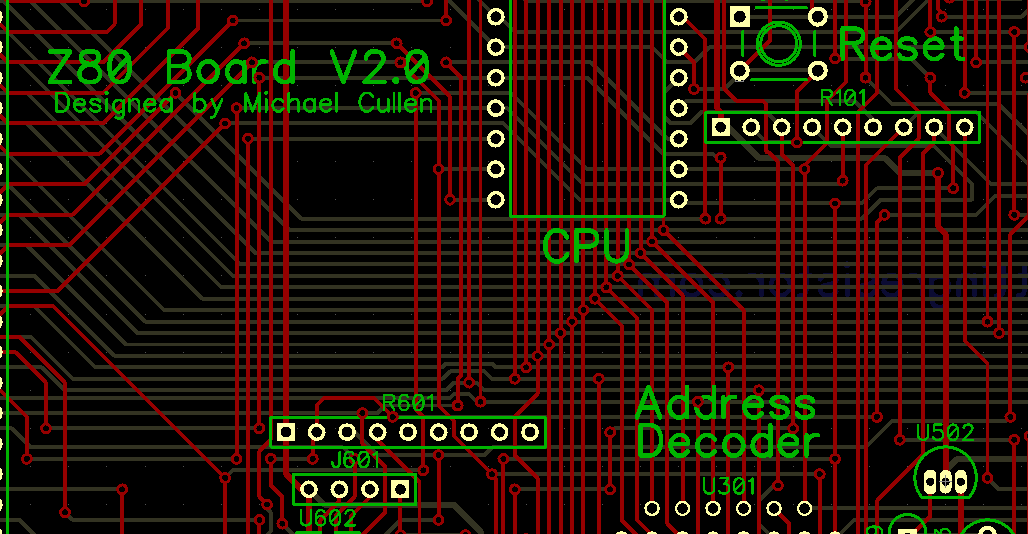
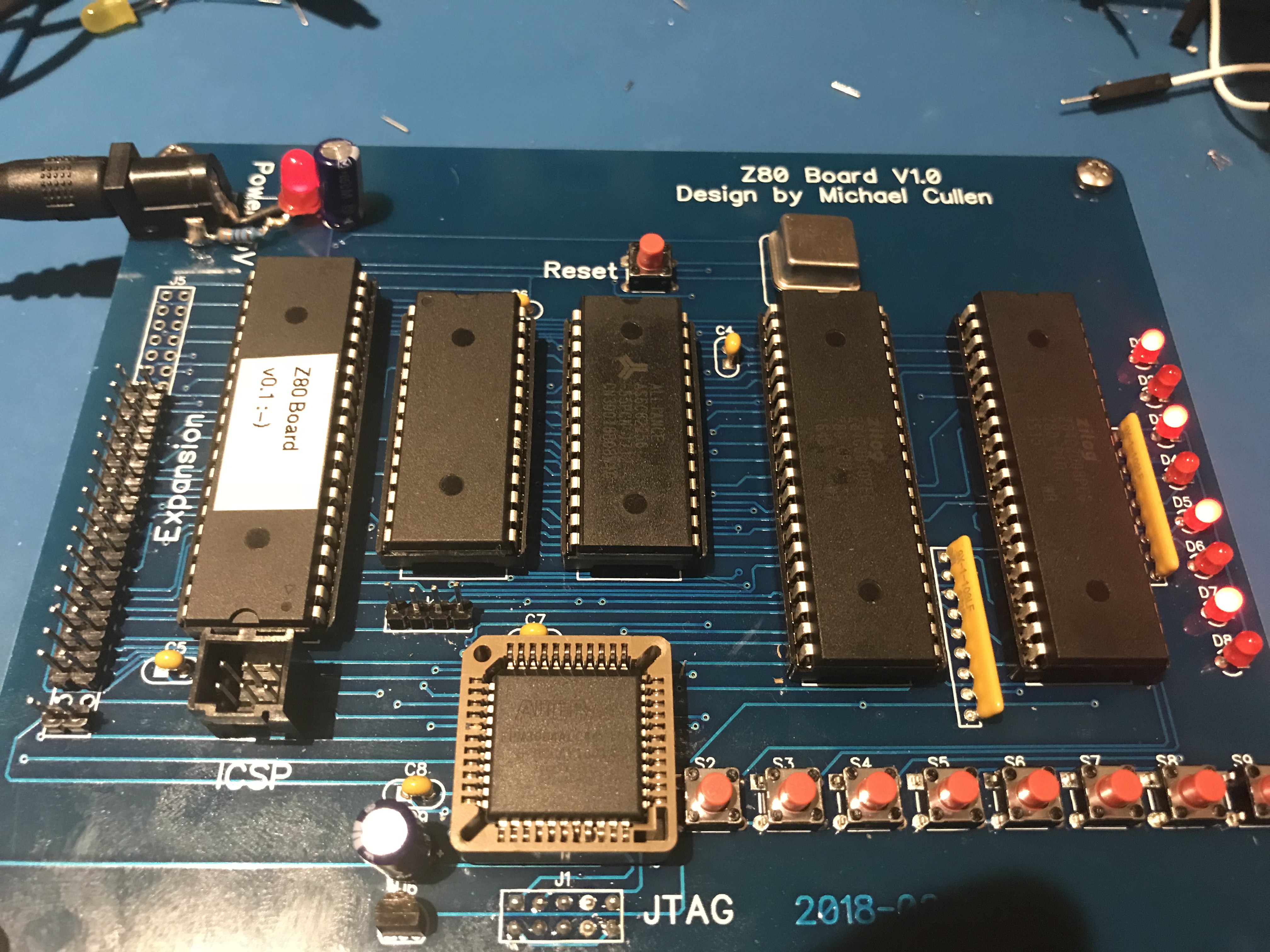
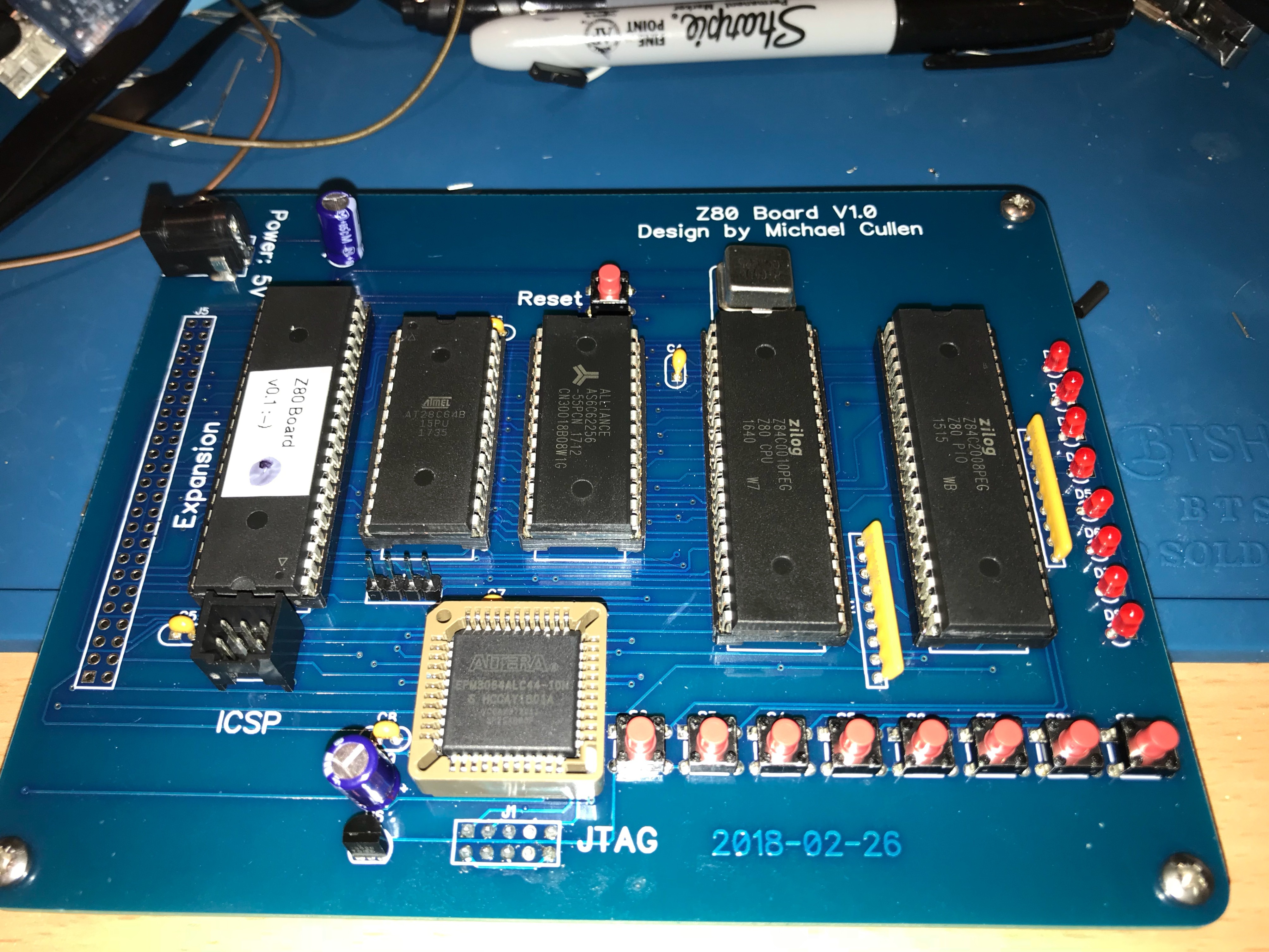
z80 Experimentation Kit
A project to produce a kit for experimenting with z80 CPUs - More an embedded board than a PC
 Michael Cullen
Michael CullenBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Tobias Rathje
Tobias Rathje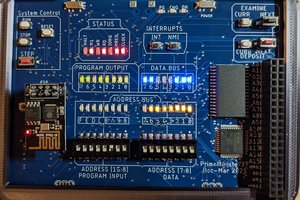
 Nick
Nick
 Ross Bamford
Ross Bamford
I like your point of designing the board with as much IO interaction and experimentation as possible. My IO build is much the same way but at gate level :-)