 kevinj
kevinjFrame
Ultimately, I have been looking at using some sort of metal (steel or aluminum) tube in a combination of 5/16", 1/4", and 3/16" sizes for the frame of this beast. The frame's tubes in the model have been sized accordingly, albeit solid for model simplicity. CFRP was mentioned and that's an interesting proposal, I would probably wrap a 3D printed frame due to its complexity rather than make all the tubes separately and bond them together. I have also given some thought to making forms for the handful of complicated parts and heat-bending plastic tubes to the right size. I don't know why I didn't think of that earlier, since it's super cheap and shaping tools are super cheap. More research is pending.
When mounting points for hardware and panels are more in order, I'm planning on 3D printing it as a sanity check step. Shapeways currently wants more than $400 for the entire frame as one plastic piece as it's big enough to be priced by build volume and density (LxWxH is about 40x19x15 cm or 15.8x7.3x5.7 inches, 1.84% density). I'm looking into getting a printer and running it off in two to four pieces, and bonding/fastening them together for the prototyping phase.
Cosmetics
The panels play a key part in the look of the Atom, along with the exposed exoskeleton. I've been designing parts based on reference images to the best of my ability, and I'm constantly tweaking them as I get better ideas and improve my CAD skills.
I plan on 3D printing these parts, with sanding and painting where appropriate. Attachment points are still largely up in the air until I settle on their designs and the mechanics underneath.
Wheels
The wheels have been designed to accept a standard 12mm hex hub and fit into 52x26mm on-road RC tires. This was actually a critical factor in vehicle scale, as I wanted to keep the wheel diameter to scale with the rest of the car. Initial material plans are FDM ABS/PLA to check tire fit with the hope to CNC them out of aluminum. Any (hard) testing will likely be done with off-the-shelf RC wheels unless those 3D printed ones turn out to be really balanced and durable.
Drivetrain
I'm currently designing a two-speed transmission for the rear wheels, to allow for a more manageable gear ratio for demonstration purposes and one for winding it up outside with enough space. The current design is a two-stage reduction, the first being through a MXL-sized belt drive to the transmission, and the second through one of the two gears.
I'm also designing the rear differential, as places like Traxxas and Tamiya don't post dimensional drawings of the parts they make, only what they fit in. Which is fair, I suppose, but frustrating. Many of these also have the cups for the universal joints located very far inboard.
Suspension
I've designed the majority of the front suspension parts using McMaster-Carr 3D part models for things like screws, nuts, and bearings. Currently the camber is adjustable via a thumb nut and threaded ball joint that are held by the upper A-arm.
I also have a pending redesign of the lower A-arms and hubs at the front to allow for adjustable caster.
All four corners have independent pushrod-style suspension, just like the real deal. Hopefully I can find some fitting off-the-shelf parts (coilover shocks, pushrods, ball joints, etc), but I've not had a ton of luck so far. I have mock-ups to gauge location and size in the meantime. There's also currently no anti-roll bar in the front or back, but I may add them later.
Electronics
I have been using a 4074 (40mm diameter can x 74mm can length) brushless inrunner for reference for the drive motor, which just fits inside the rear frame. There's space above the motor for the controller, as well as between the front of the motor and the seatbacks, depending on its size. If it's above, the scoop could act as an air duct for the heatsink, with a small muffin fan built in. If it's behind the seats, air from under the bodywork could cool things, but there would need to be some impact/dust...
Read more »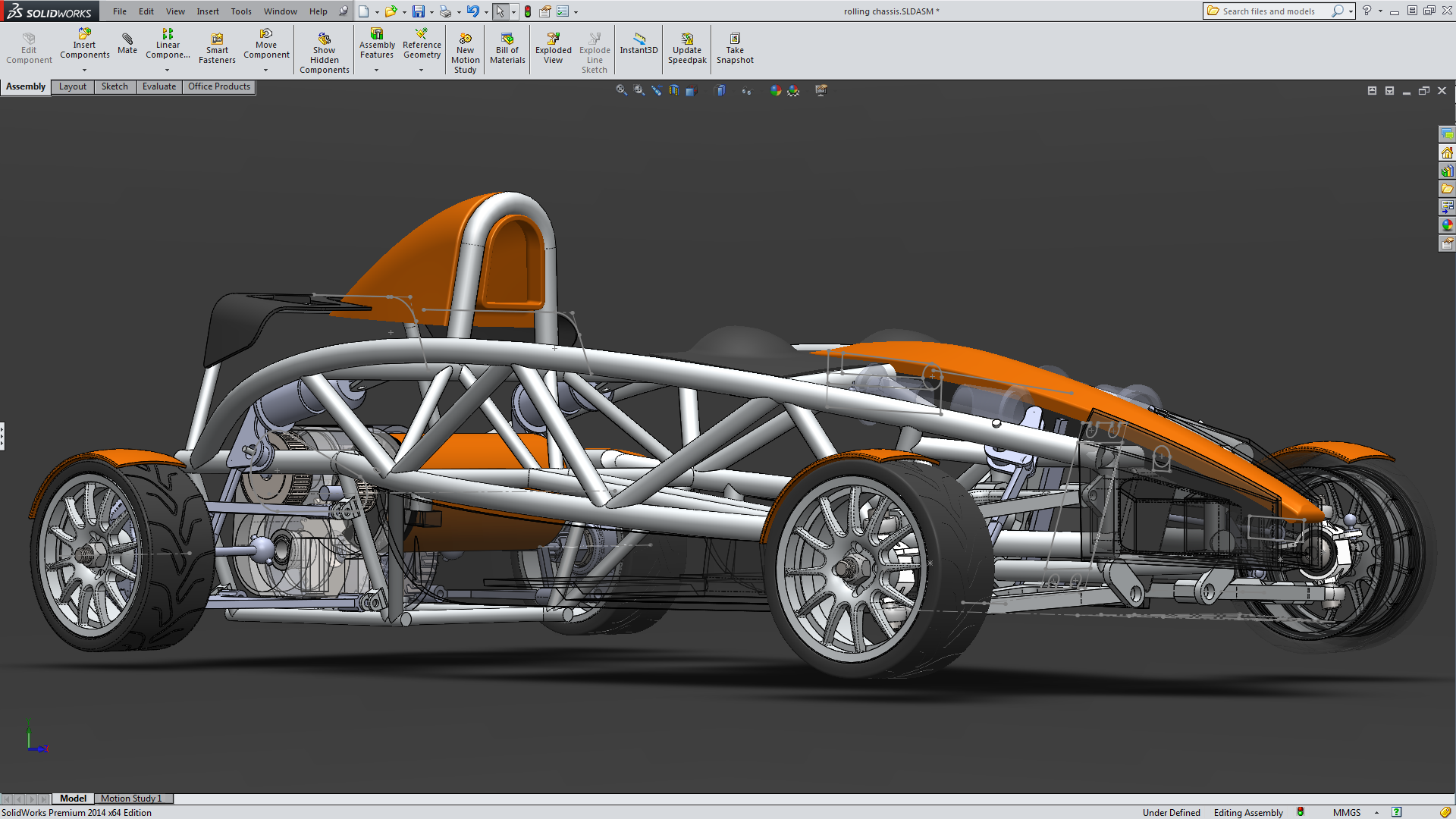



 Colin Kingsbury
Colin Kingsbury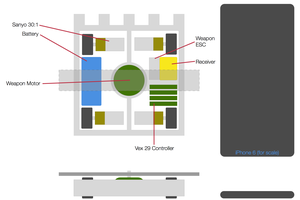
 Andrew Schreiber
Andrew Schreiber
 Mike Turvey
Mike Turvey
you really did a good job to make this excellent project. I appreciate your hard work. I want to embed it with my webpage. you can see here https://alightmotionhub.com/