 Pengu MC
Pengu MC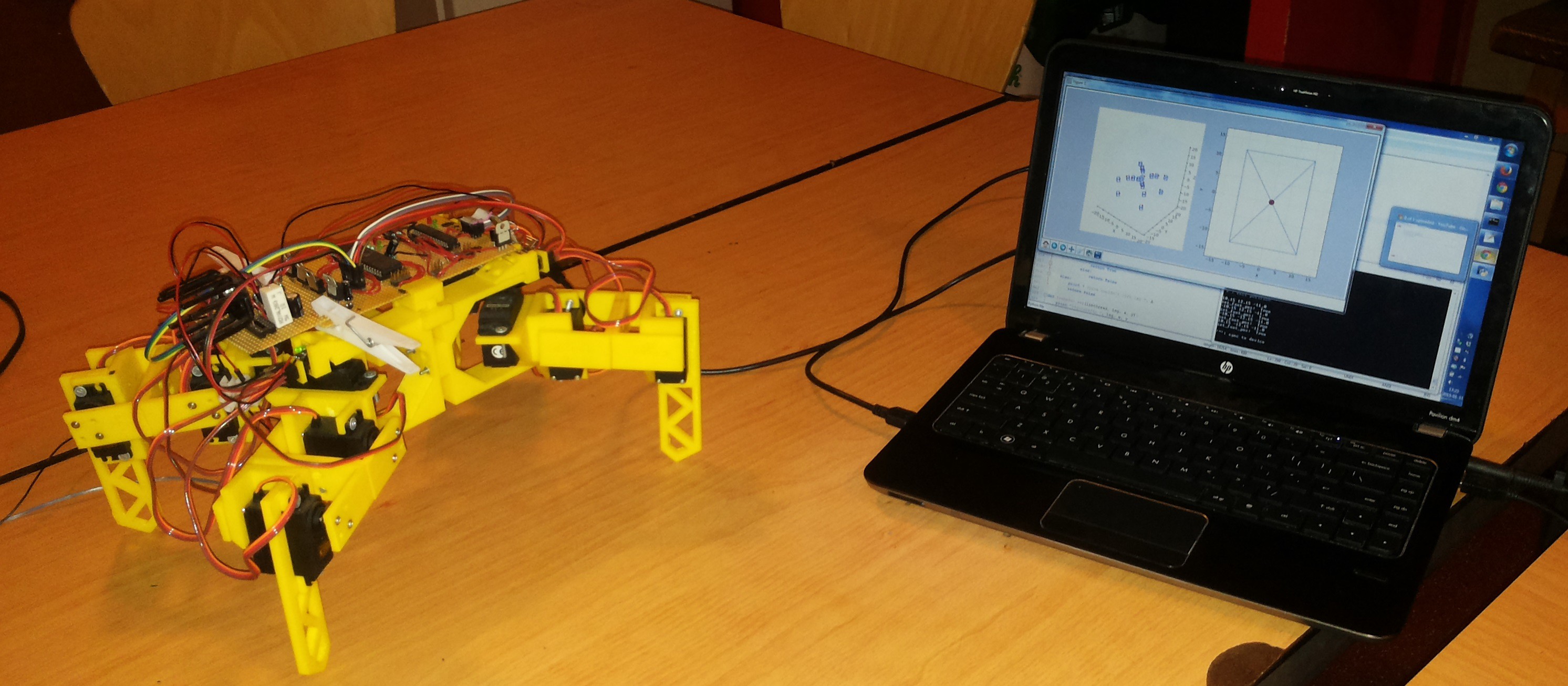
The first working stable gait (dynamically generated) is working. The robot can now move its body in a straight line in x or y direction (one of the two) indefinitely and the legs will move to keep the robot stable at all times. Since turning was already available, we can now walk anywhere:
The lighting is terrible I know. The feet are still being lifted in a very rough manner, causing the rest of the robot to slip over the smooth table. I'm working on that...
The code is already up at github
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.