 deʃhipu
deʃhipu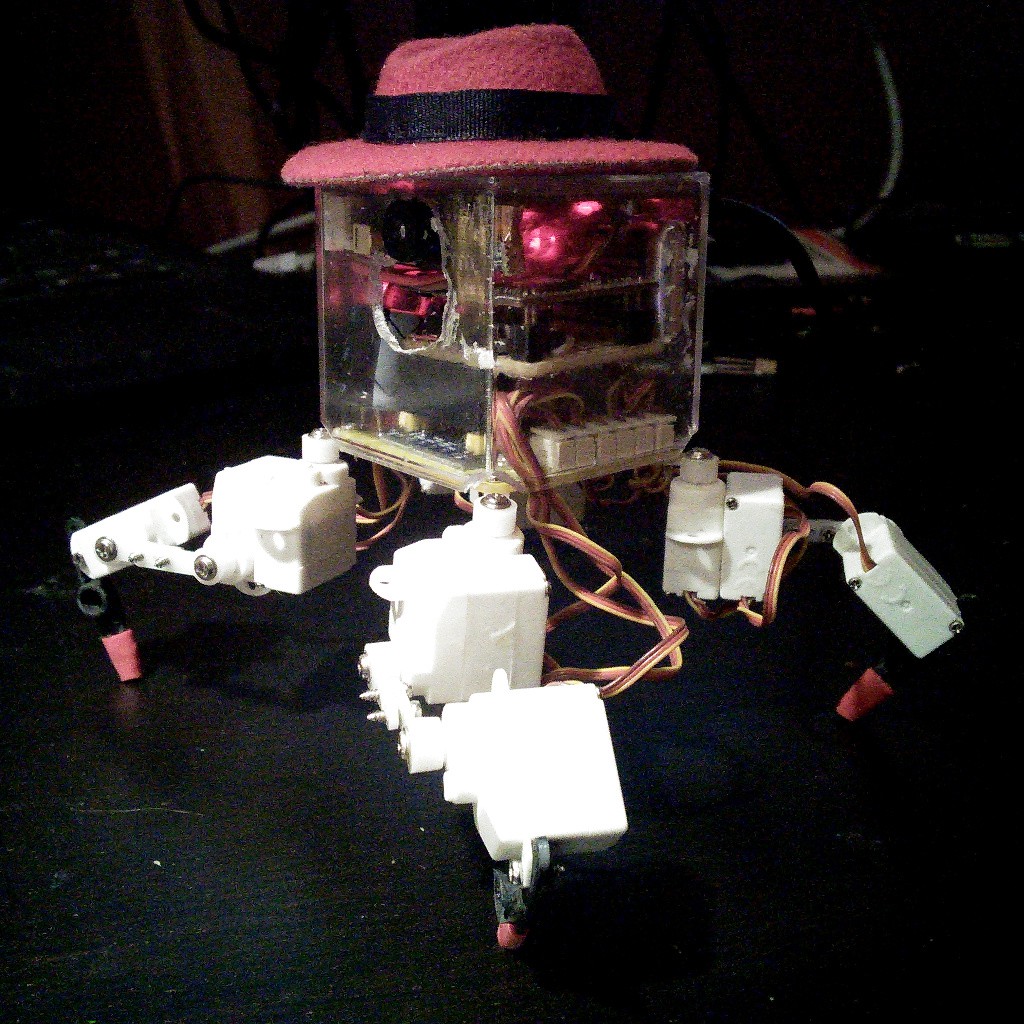
I finally got to rebuilding the VoCore version of pKubik using the new printed circuit board. On the photo, starting from the top, you can see:
- a hat
- battery charging module
- camera module
- battery
- VoCore
- breakout board for the VoCore
- Arduino Pro Mini
- the new board.
I also compiled a new OpenWRT image for it, and made sure everything works as it did before. So now I am where I was a week ago, except with a sturdier and more modular construction.
I also have the gait implementation I wrote for the Arduino-only version, and I'm tempted to drop the Micropython version. Instead just accept commands for the Arduino-controlled gait on the serial, and echo those through ssh from the VoCore.
Oh, I also finally found a good source of rubber for the feet. Old-school bicycle valves used pieces of a small rubber hose. You can still buy them in bike shops today, and they make excellent feet for the robots.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.