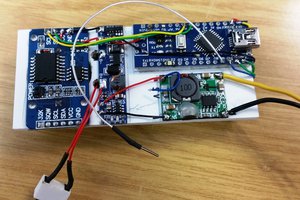
I went ahead and installed the missing backup battery on the GPS board and resistor R1 that connects it to the module so I can see what difference it makes next time I take it out. If anyone wants to try this the resistor R1 is 1K ohms (102) on most boards and the battery is made by SII model MS621FE rechargeable 3 volt, 5.5 mAh that costs $1.55 on Ebay. Be sure and put a drop of glue on the battery because the small tabs alone won't hold it in place.
According to the UBlox spec sheet it enables all relevant data to be saved in the backup RAM to allow a hot or warm start later. I think that means that it can find it's position faster.
I hope this makes the GPS more reliable. Before, when I took the drone out the first time the GPS seemed to lock in pretty fast and the green LED came on in just a minute or two but I think that was premature because it tended to drift to the side and not hold it's position. Then when I reset it and calibrated the compass again it would hold pretty well. Hopefully with the battery it will work the first time now.
 David Hopkins
David Hopkins
 AirCruiser
AirCruiser

 Danny Andreev
Danny Andreev