 Eric Herbers
Eric HerbersThere's hope! Lots of refinement to do, but as far as having a working concept by the deadline... there's hope.
So what have I done? Well largely try several dozen different ways of attempting the same thing and tweaking the software to improve timing and reduce standard deviation of the results. In the end I toyed with timing a single transmission and attempting as many as possible within a set window; both single channel and multi-channel. After reading both the white papers I have linked, I decided to focus more on timing singular transmissions as both papers indicated that averaging the results was their end means.
Sure enough, sending 1000+ transmissions produces some interesting histograms that do show a trend. While I haven't been able to prevent outlier data, I have decided to at least limit the used results to a specific range which has improve the averaging results greatly. The downside is that due to the number of rejections, trying to get 1000 good samples can take up to 10 seconds... that needs improvement.
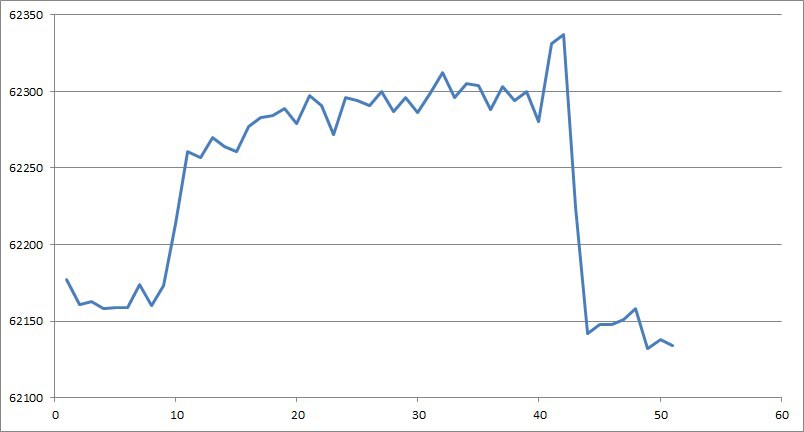
Regardless, here's a handy graph! After taking 5 or so samples, I would move the transponder further away from the receiver. Measurements were taken at <1 foot, 3 feet, 8 feet, 12 feet, and somewhere around 15-16 feet, around a corner and down the hall before returning to 0. All but the furthest were taken line-of-sight and the results show that the further away you get, the more deviation is seen in the results. The results are also very non-linear below 3 feet.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.