 Bud Bennett
Bud BennettFunction:
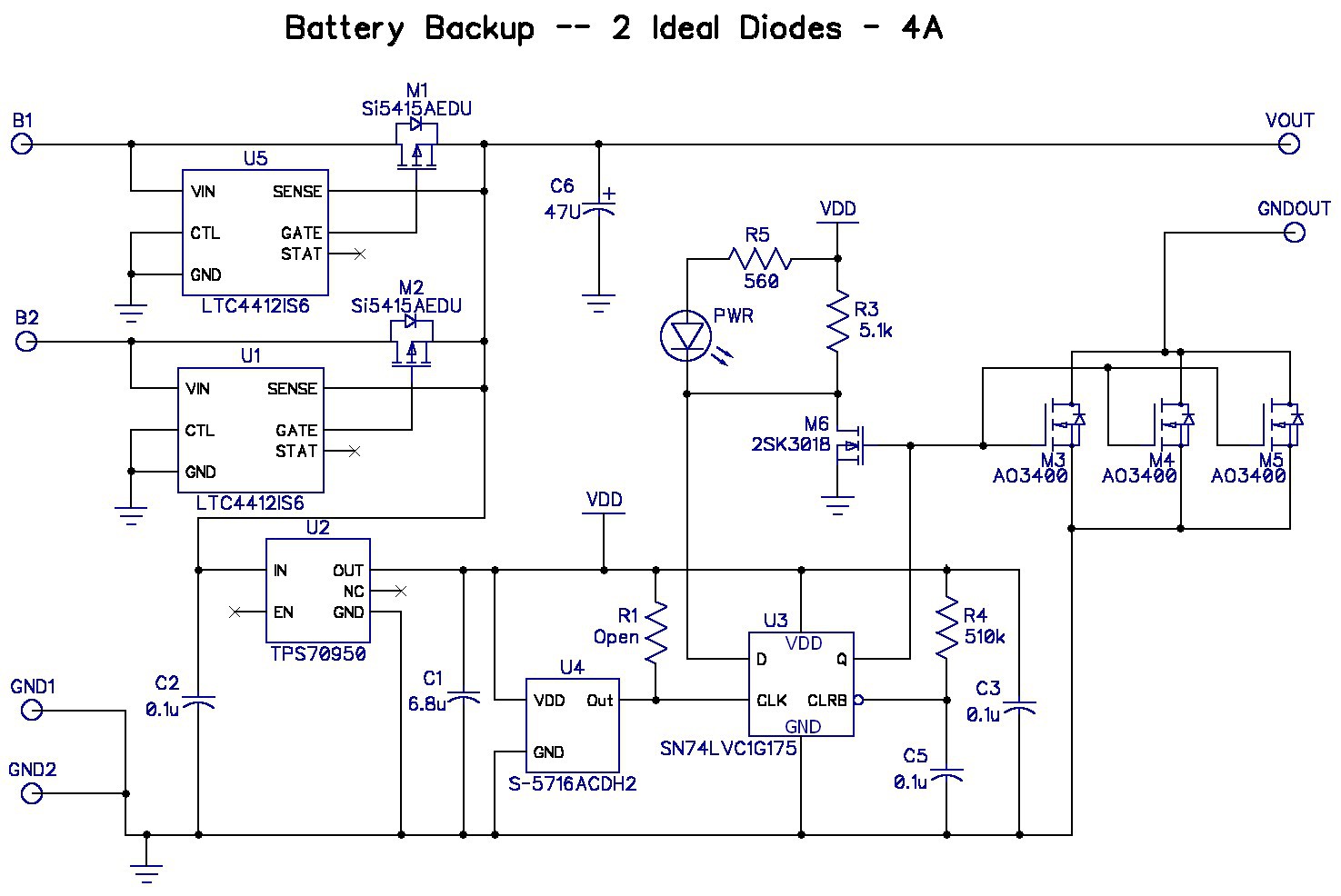
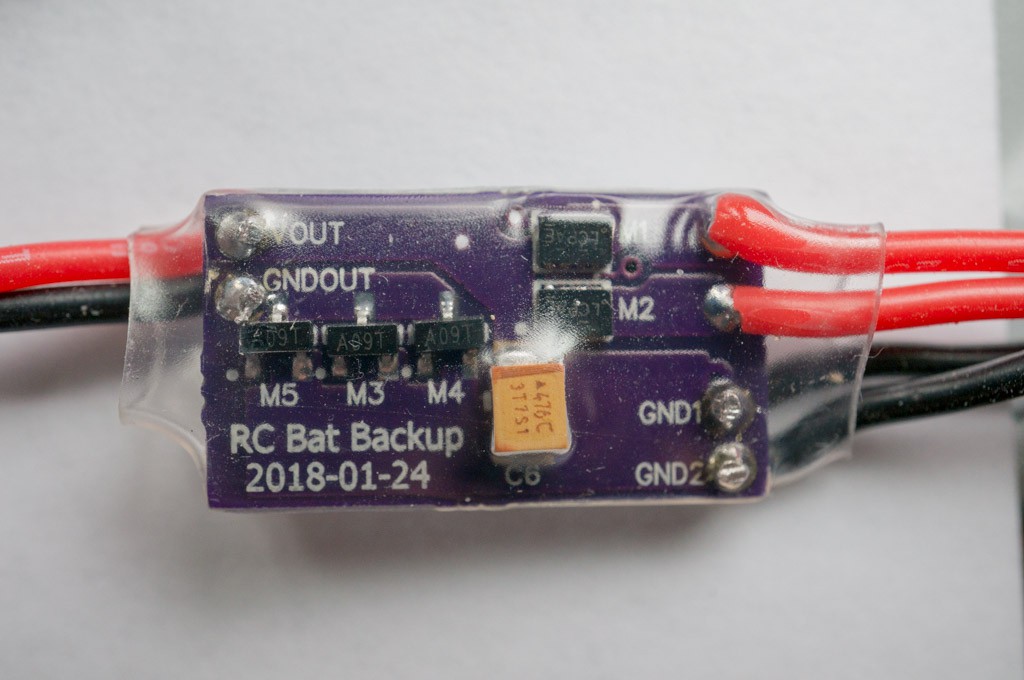
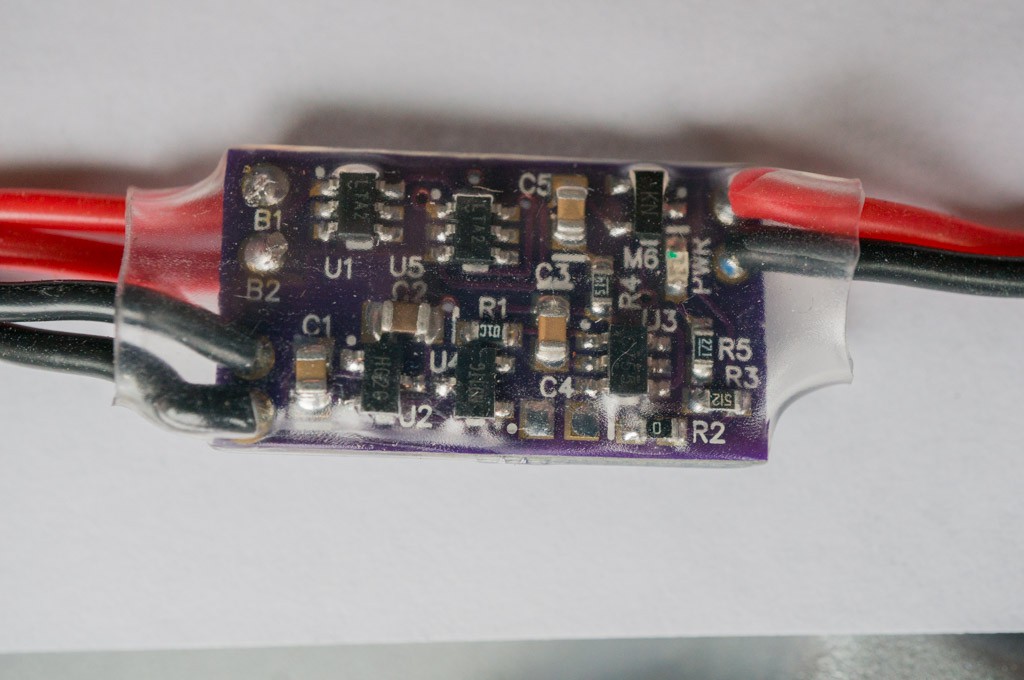
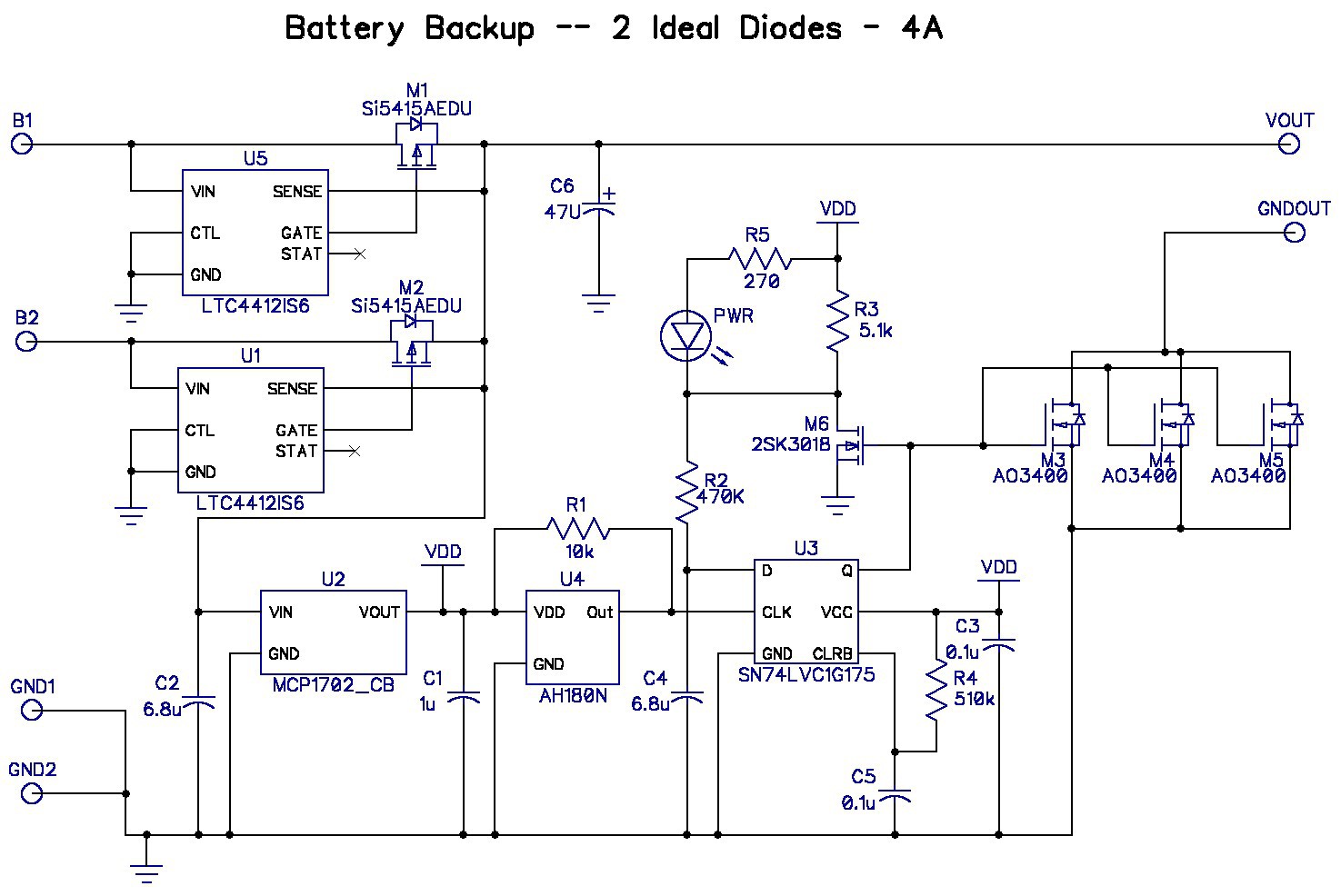
The concept is pretty simple: select one of two batteries with the highest voltage and switch it to the load. If the two batteries have the same voltage then both are connected to the load and they will share the load current between them. The voltage drop across the switches should be as low as possible to keep power dissipation, heat, and losses to a minimum. Power to the load can be switched on or off by momentarily placing a magnet near the circuit. This allows the circuit to be completely enclosed within the aircraft fuselage. The current drawn from the batteries while in the off-state mode should be as low as possible . It should take more than one year to discharge the batteries.
Specifications:
Input Voltage Range: 3 - 13V (1S to 3S LiPo batteries)
Max current to load: 5A
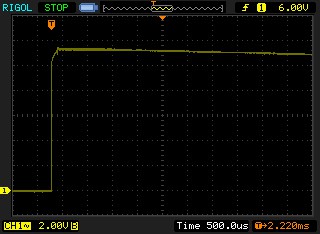
Switch Insertion Loss at 5A: 100mV
Off-state Current: <40µA
On-state Current: 5.5mA (almost all of that goes into the LED)
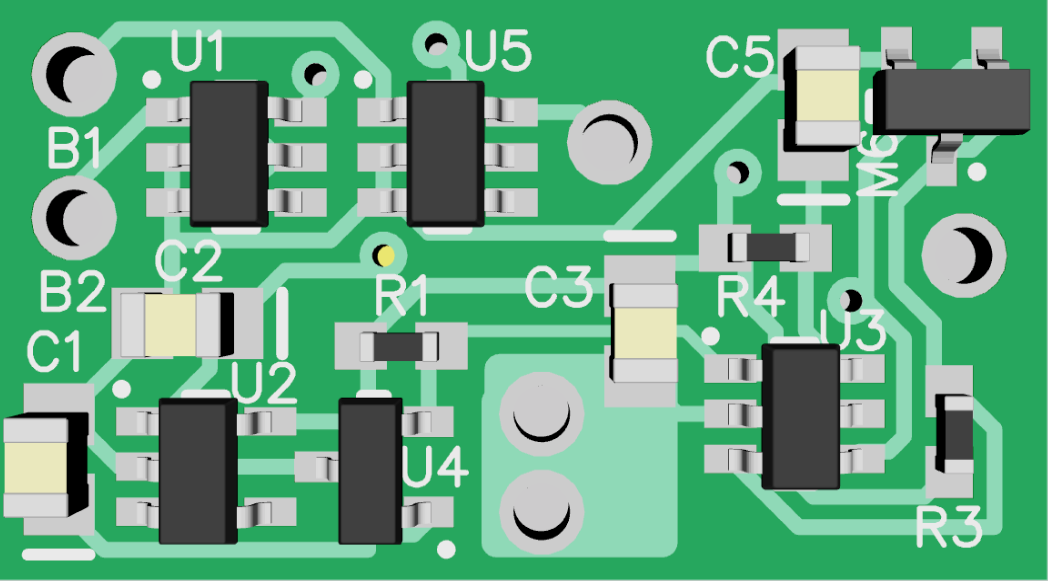
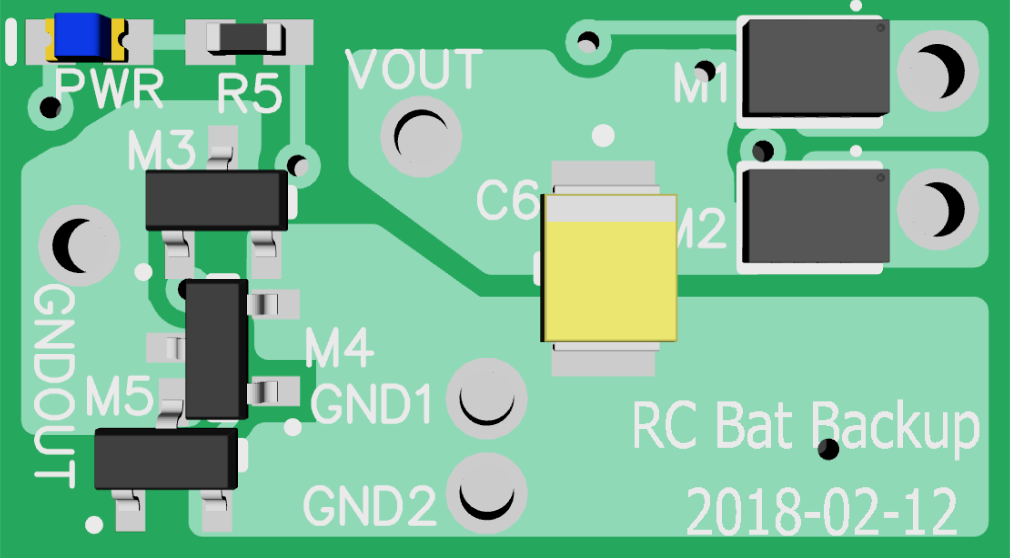
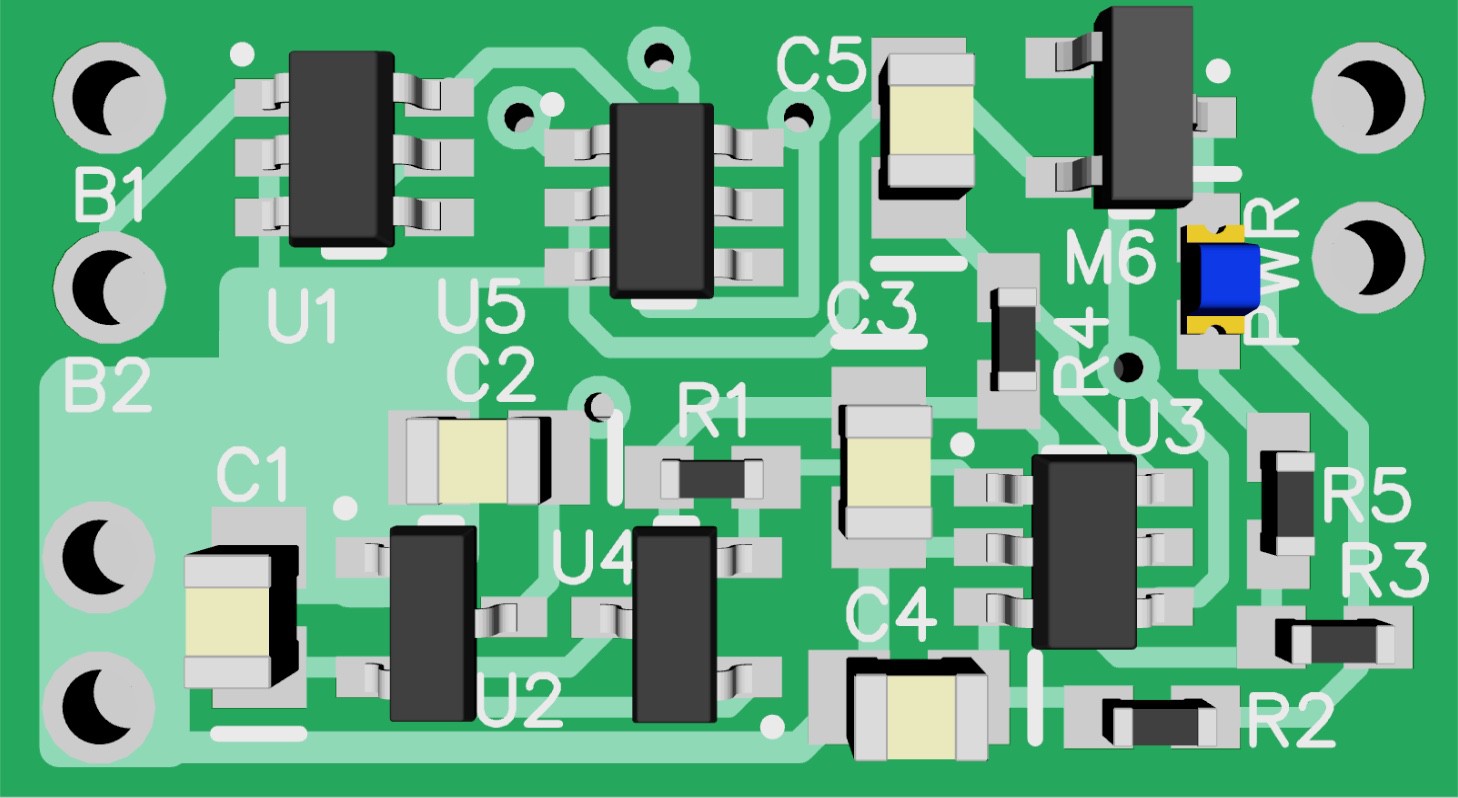
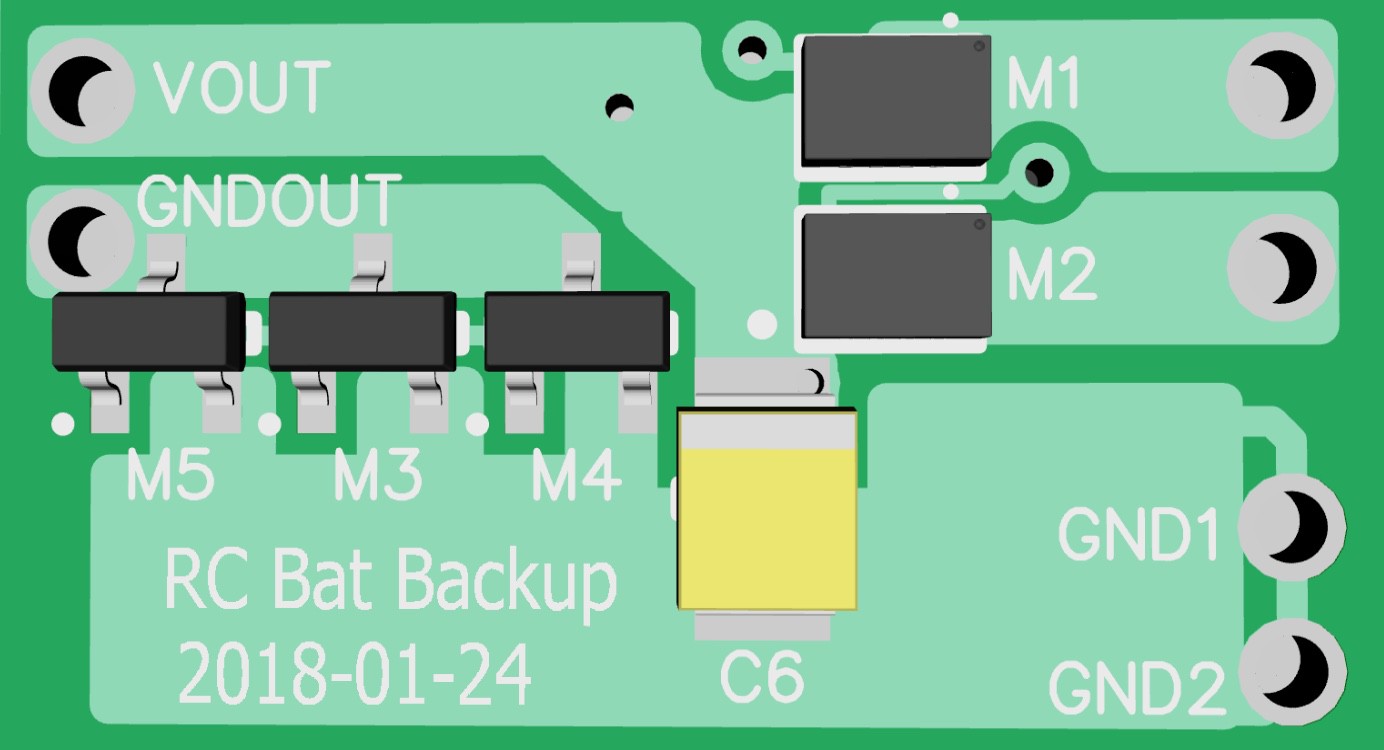
Size: 12 x 22mm (0.48" x 0.87")
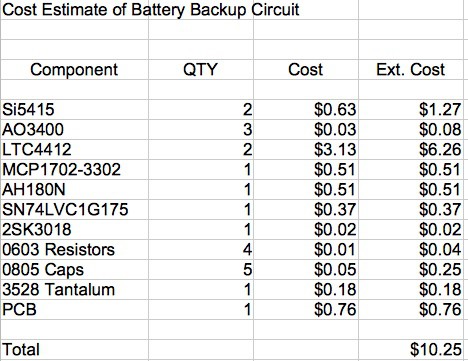
Cost: $10.72 for components and PCB.
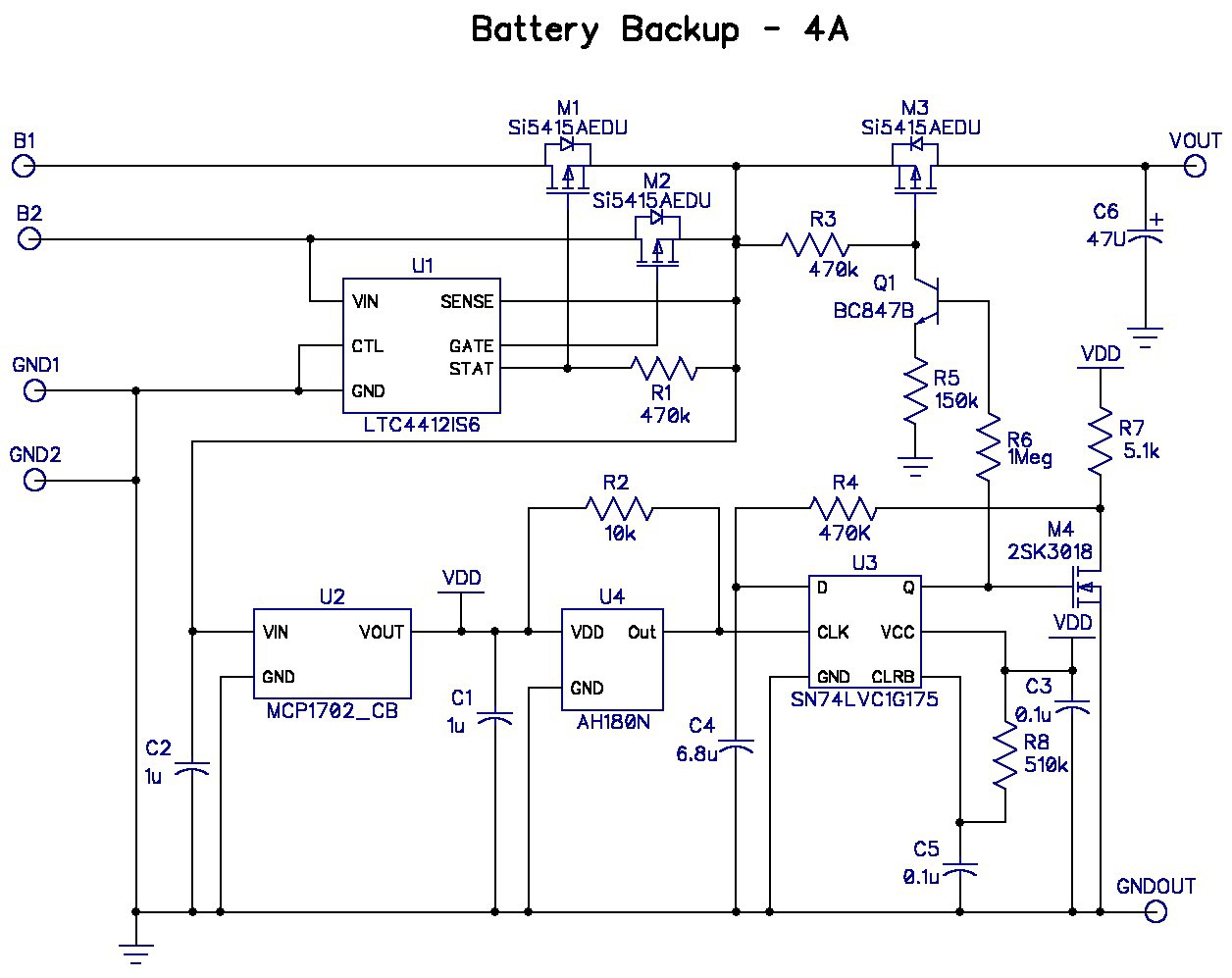
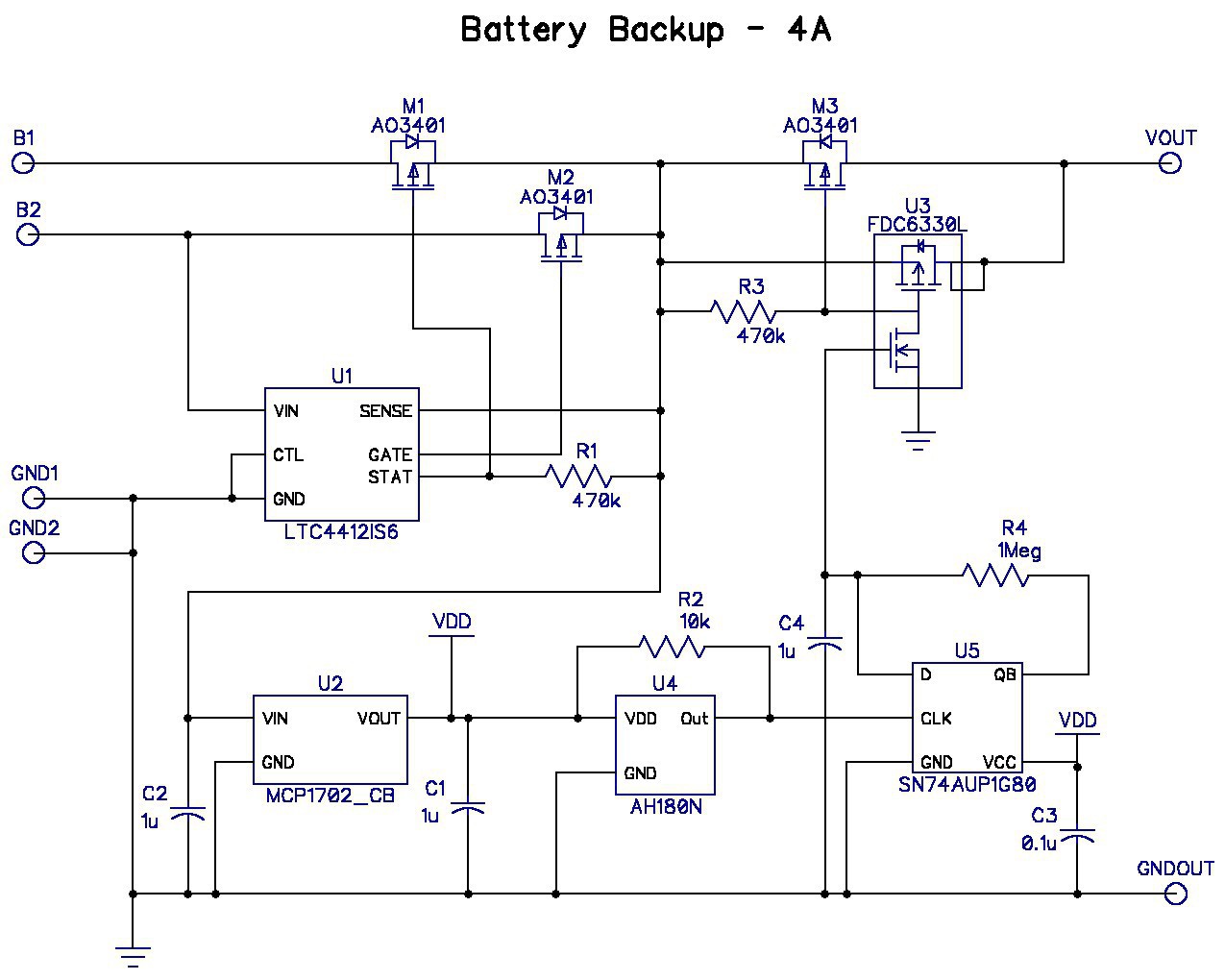
Latest Schematic (7 March, 2018):



 dave.m.mcdonough
dave.m.mcdonough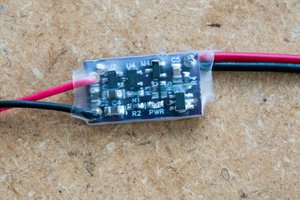

 David Scholten
David Scholten
Hello Bud, your project is very interresting. For safety reason what do you think about changing the voltage gate control (M3, M4,M5) ?
If the D flip fop fall down, the circuit is switched off !!! If the principal voltage (ie Vout) control the MOS in the on state when you plug the batteries and your D flip flop helps only to switch off the MOS by pulling down the gate of (M3,4,5) it would perhaps improve the safety ?
What is you opinion ?
Renaud