 Tim
TimI have been dreaming up this project for a long time, and the Trinket Everyday Carry Contest is the perfect excuse to actually do it. I started about a week and a half ago to acquire parts and brainstorm how I'm going to create this thing.
Before I read about EMGs, I was planning on wrapping a flex sensor around my forearm and hoped that I would get enough feedback out of it that I could detect patterns of muscle movement. Some preliminary experiments make me think that would be either very difficult or unreliable.
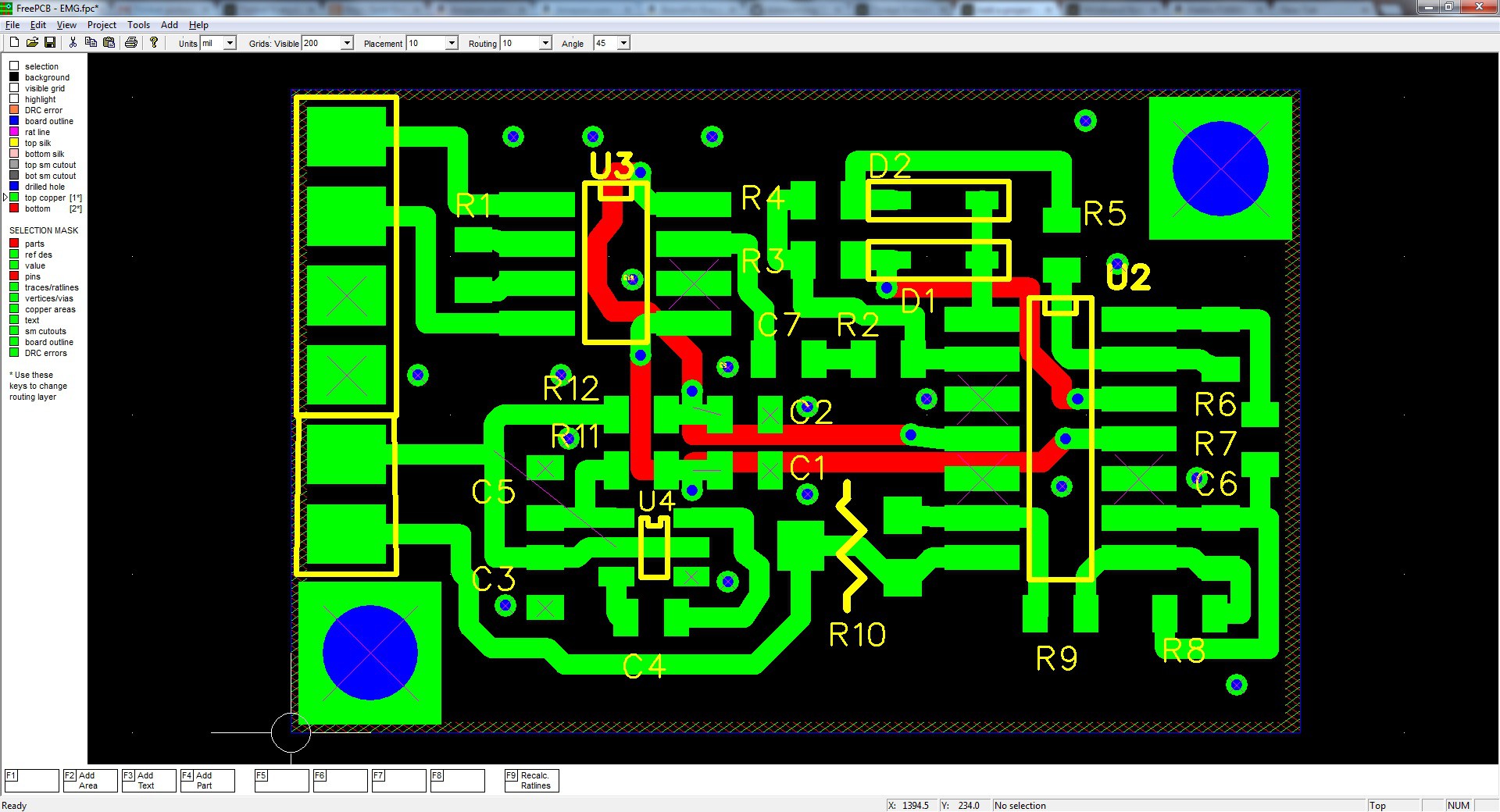
I found the "Muscle Sensor V3" (http://www.advancertechnologies.com/p/muscle-sensor-v3.html) and thought that would be perfect for what I want to be able to detect... but $50? I probably would have paid $20, but $50 was out of the budget for this project. The guys at Advancer Technologies were nice enough to post all their schematics though, so I took that design and improved it with a MAX1720 switch capacitor voltage inverter so that the EMG circuit can run on a single cell. (The opamps need a +, GND, and - voltage rail). All my parts arrived for the EMG circuit from Digikey today (12/8/14), my Trinket Pro arrived sometime last week. Friday at lunch I took advantage of my at work access to a T-Tech pcb mill over lunch and cut out the board that I drew up for the EMG circuit.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.