 Tim
TimSince the last update I was focused on getting the mechanical motion really nailed down. I went through 3 revision of the mechanical bits.
I didn't take any pictures of revision 1. That was more or less just a test to see if the geometries I was working on would even print.
Revision 2 is pictured below. It is 3 sections screwed together. My printer is an UP! Mini (which I think is a fantastic printer) but it only has a roughly 4" print bed, and this contraption was a little more than 5" long. Having it be 3 separate sections also made the design a little easier. I'm doing all the 3D modeling in Design Spark Mechanical and I'm learning a lot along the way. Before this project I only ever used design spark to make really simple parts, but this project is forcing me to learn how to use it well. This revision didn't work out awesome. I wanted the screw driver to get slanted up when fully extended, but I didn't get my hinge points correct with this model to make that happen. I also had a few interferences with the arms when trying to move over the full range.

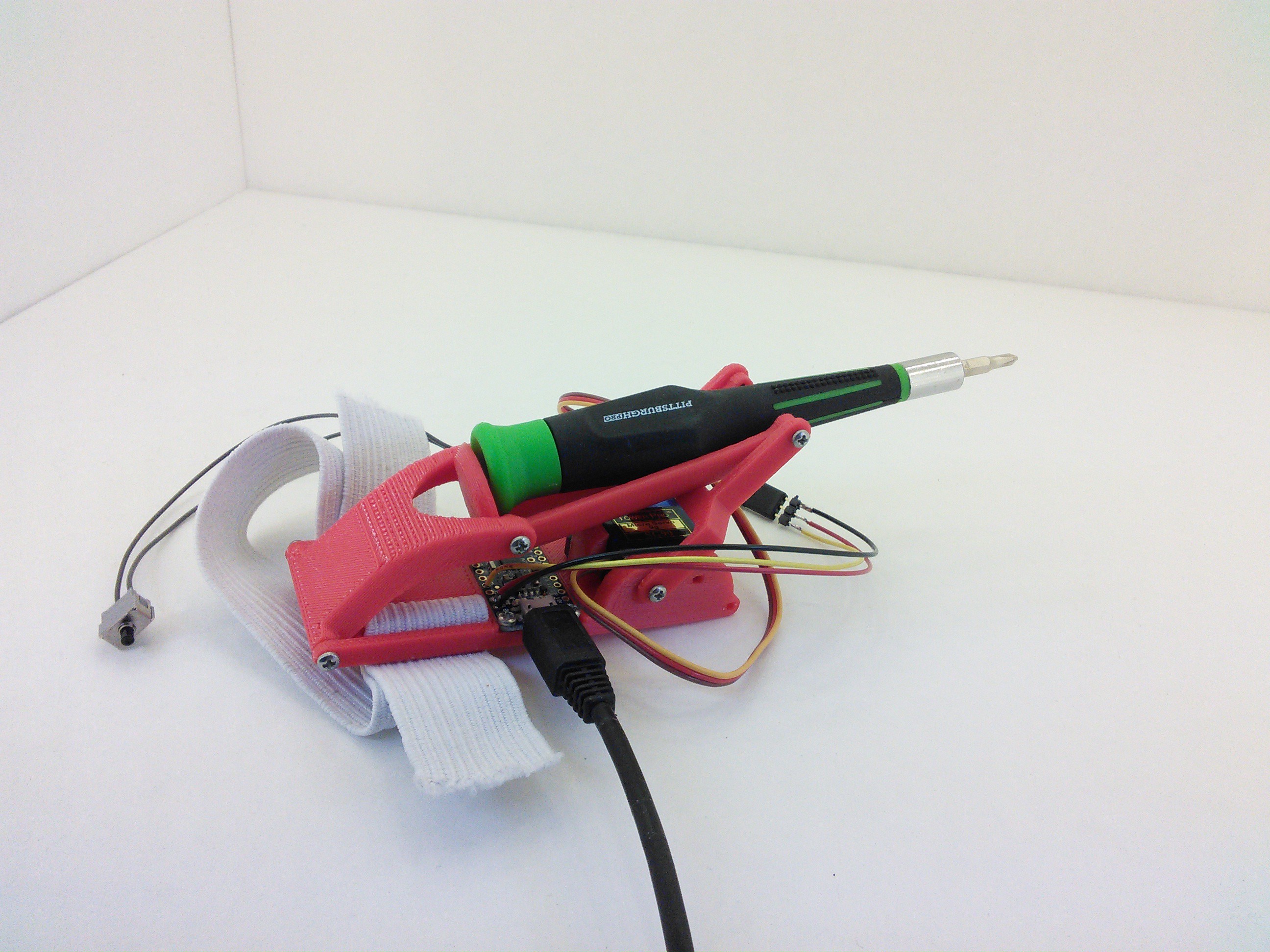
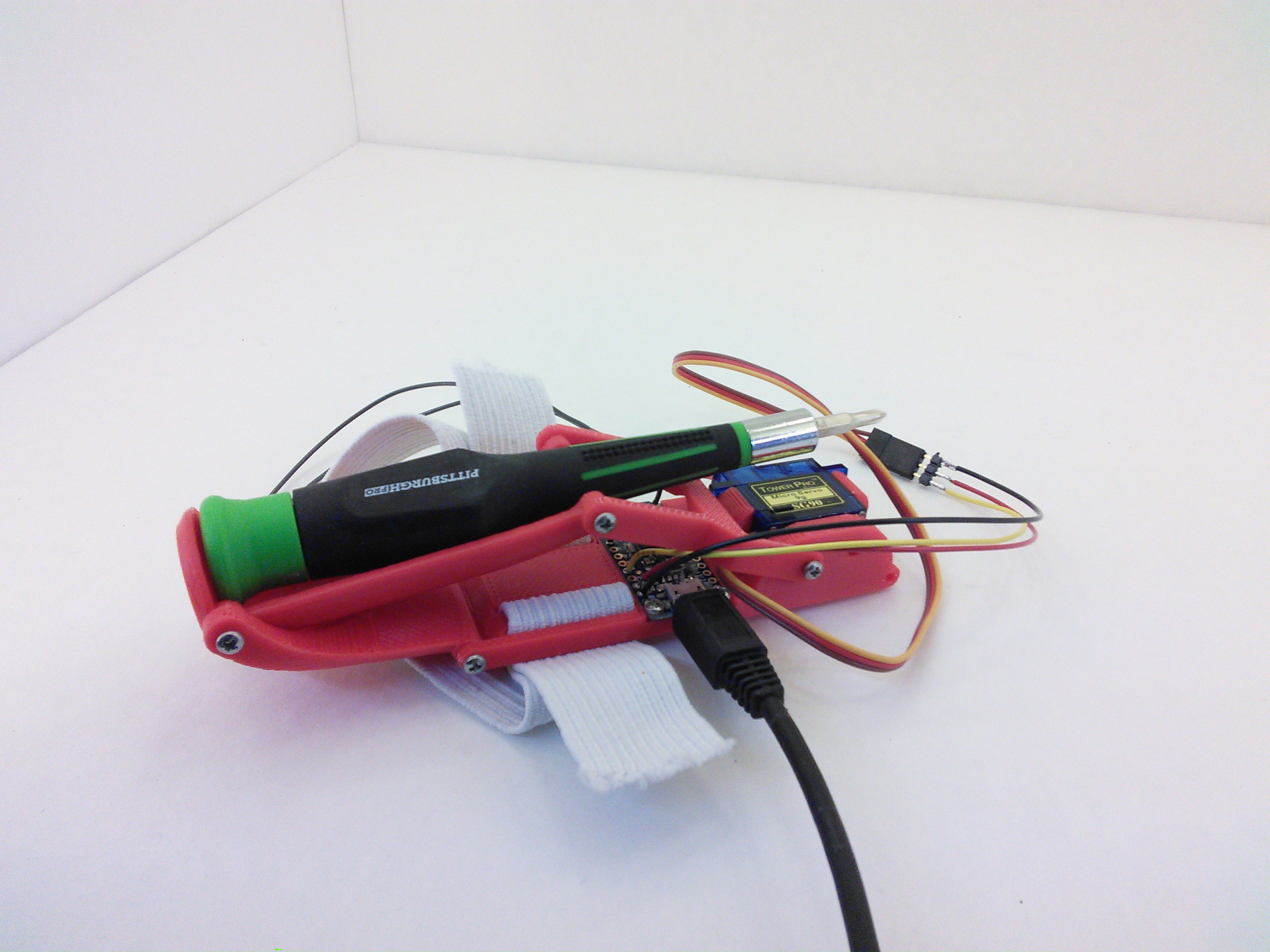
Revision 3 of the hardware is a big improvement over revision 2. Trying to fix some of the interferences of revision 2 lead me to realize that the right most section of the design really wasn't necessary. I could instead make the whole third section an arm. And it needed to be contoured to the screwdriver holder to make it fold up nicely. With the 3rd section gone I could now print sections 1 and 2 as one piece, so I merged them together and moved the Trinket Pro a lot closer to the servo.
Revision 4 is going to be necessary to fix a few more issues. The screwdriver needs to extended about an inch further to your hand to make it easy to grab. Also I need to integrate a small battery area. I don't think I'm going to use my 18650s, I got a cheap 5V boost supply that can run off of a single lithium cell. I'm going to see if some of my small indoor quad batteries will drive it OK.
I threw together a real quick servo moving sketch for the Trinket Pro and put on a button so I could see it in motion and test fit it on my arm.
Lastly - I've decided to scrap the EMG circuit. Even with everything all tuned up well, it is unreliable. I probably just need to buy a nice set of skin probes, but my home made probes are difficult to get good skin conductivity. And I don't want to muck around with probes that wear out and require a conductive gel to be used. That would just be a barrier to this thing actually being useful. I haven't decided yet how I will actuate it, but the EMG is out the door. Now I need to think up something creative that the EMG in my project name should stand for. Suggestions? I'm thinking Electro-Mechanical... Glove? Gauntlet?
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.