 John117
John117In early 2013 I officially got into hobby robotics by helping Kickstart the BrickPi: a Raspberry Pi robotics platform. It has been a wonderful exploratory journey of programming, physical computing and electronics.
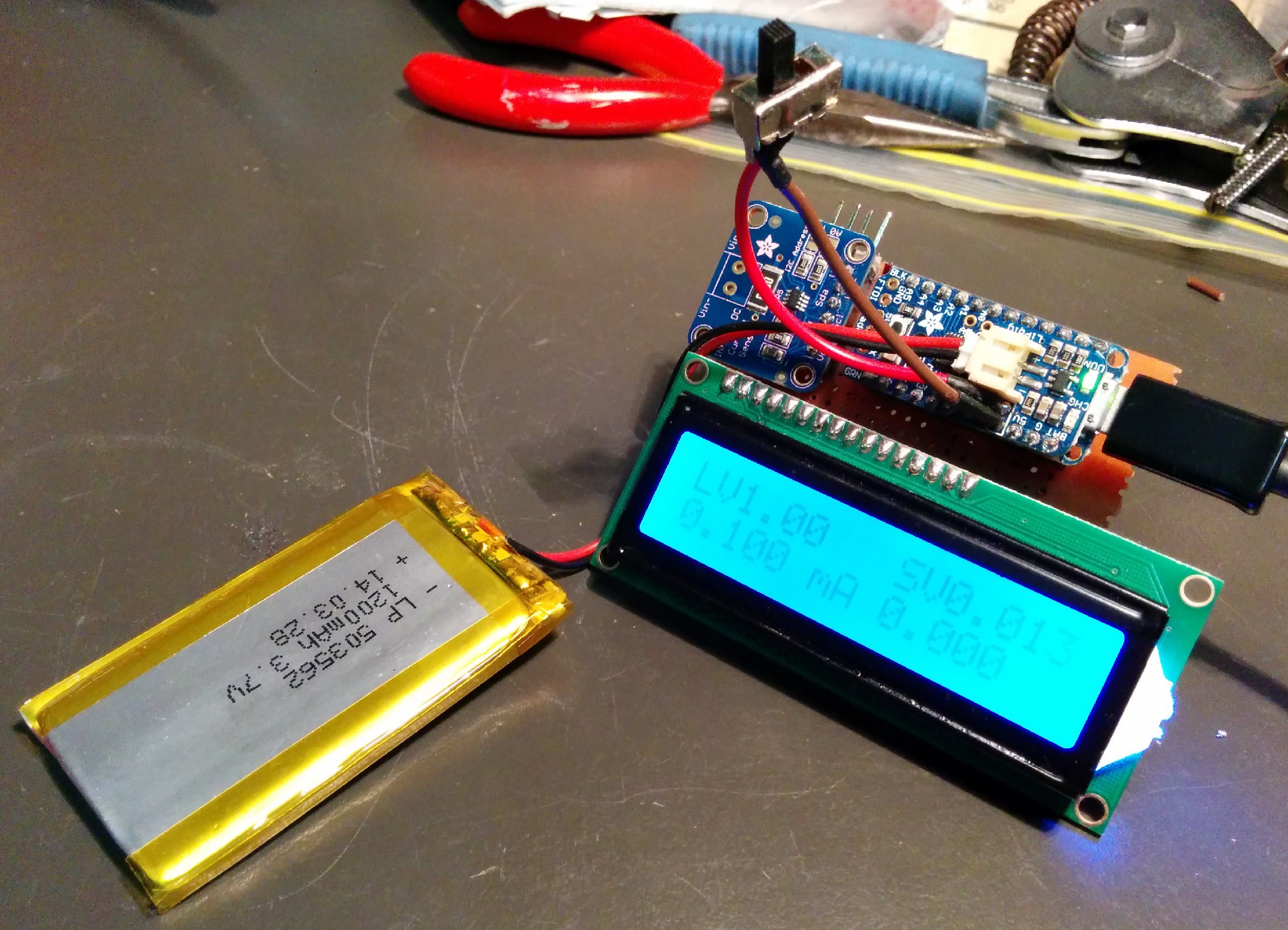
One of the most important parts about making a robot is power management. I wanted a reliable way to determine how much power was being consumed in real time when say, the robot was simply powered on, the robot was running its motors, the robot was live streaming video back to my desktop or simply taking in analog sensor readings.
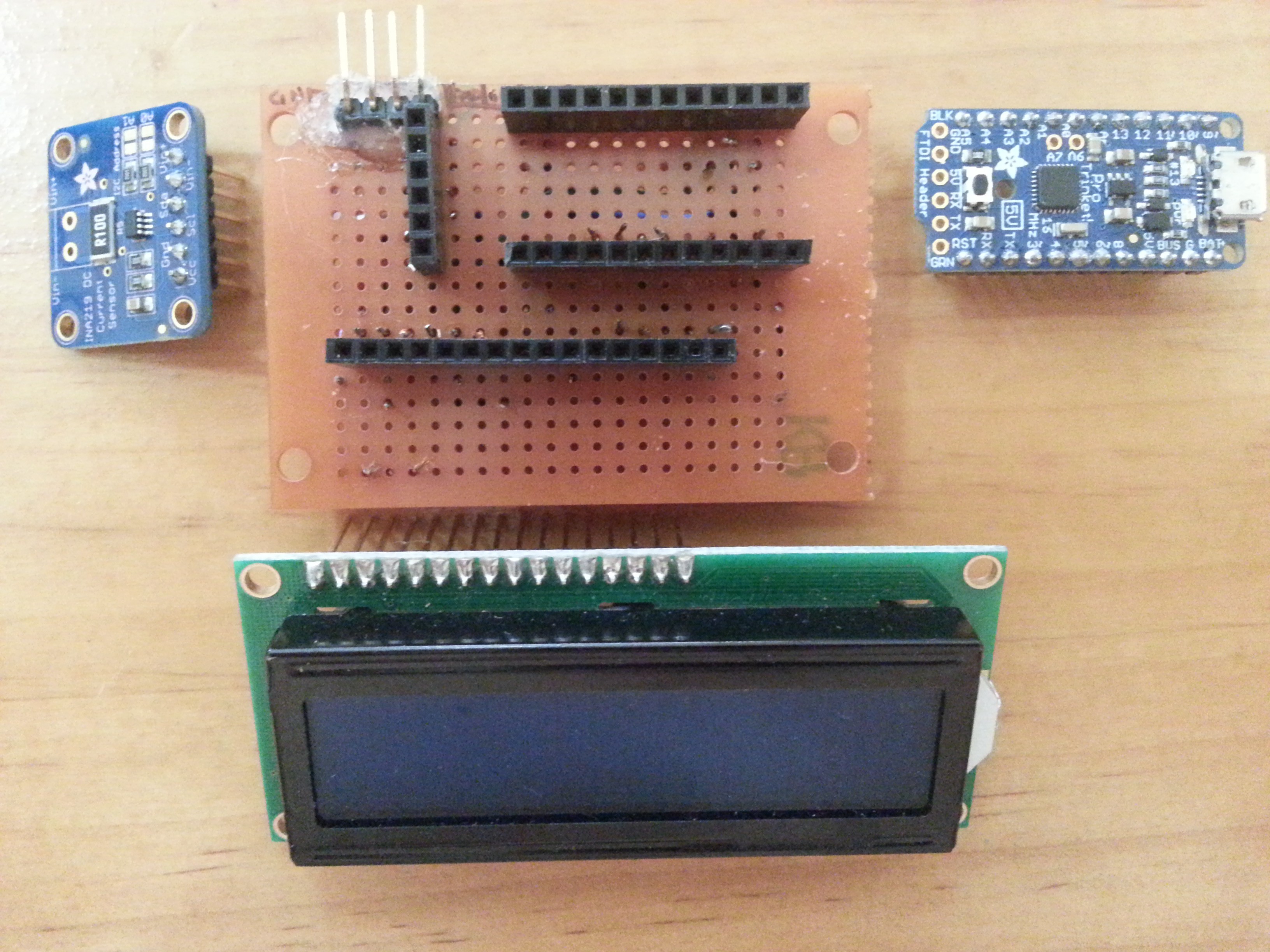
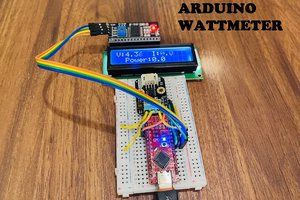
I could have relied on the data sheets or used a multimeter twice (once in series for current then again in parallel for voltage), but I wanted to have a simple, accurate read out of both on a neat little LCD screen.When I first saw the Adafruit's INA219 breakout board I was sure I wanted to try it out and see of it could help me understand the power consumption of my robot (so that I could optimize the battery size, and reduce power consupmtion where ever I could).
I also realised that this device could be used to more accurately determine how much power was being delivered from a solar panel to a battery since the INA219 can measure current Bi-directionally.
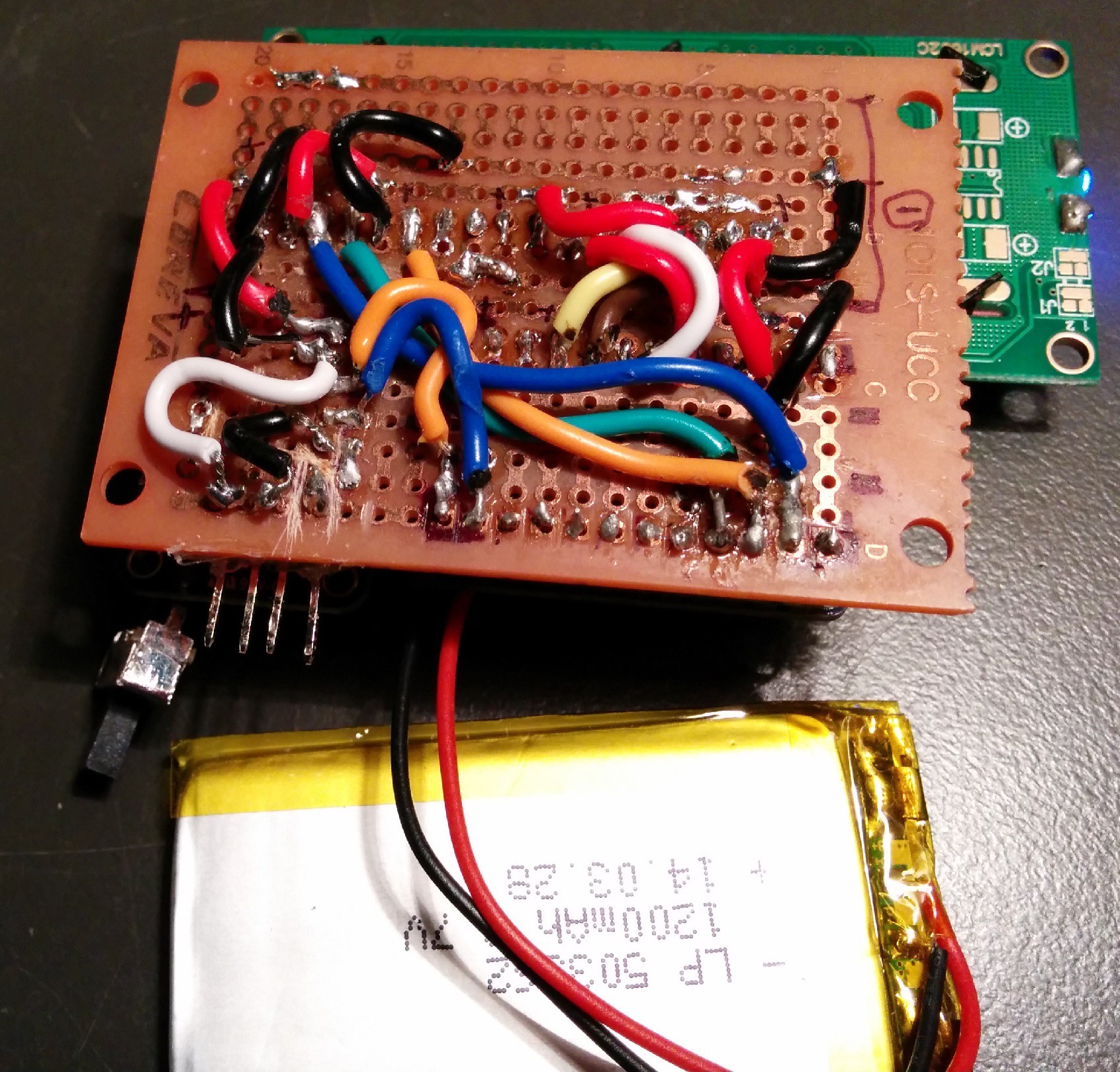
Putting this all into a small form factor with a Trinket Pro with a battery and switch is the next challenge.
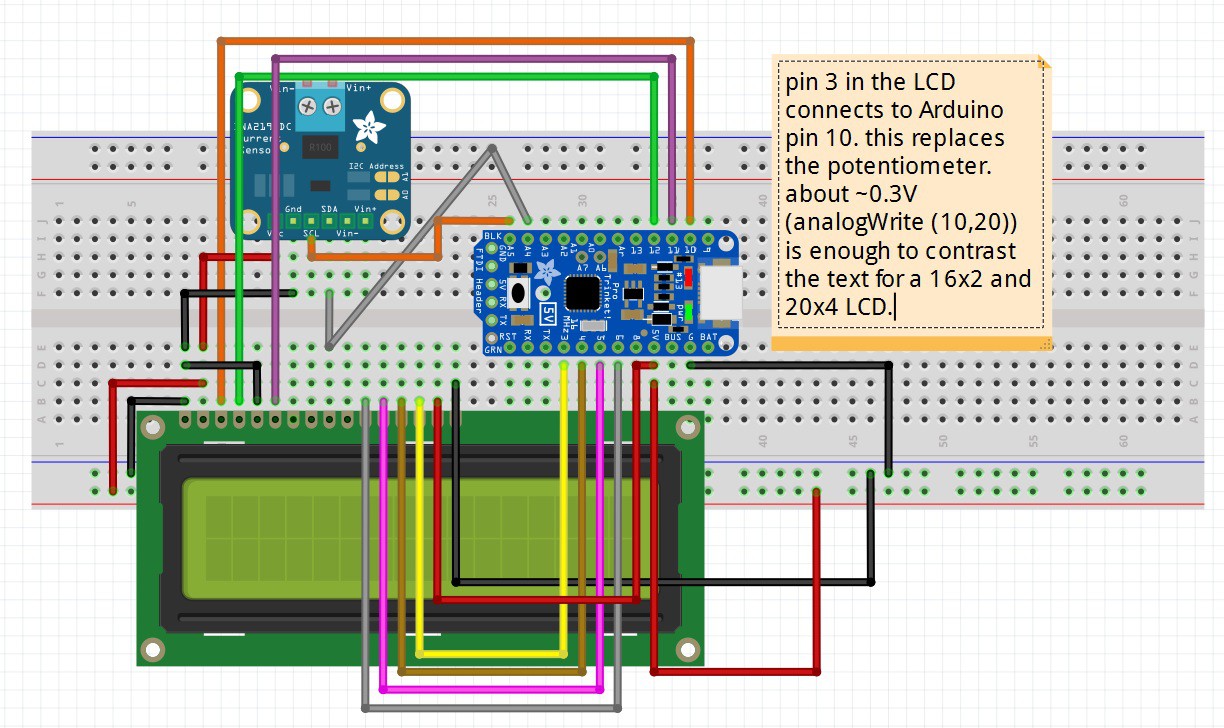
I also wanted to keep everything modular in case the INA219, Trinket, or LCD failed. You could also upgrade the LCD size from 16x2 to a 20x4 to read out things more clearly (will have to modify the contrast values).
(Future tests to do::: Do independant current measuring tests with both the INA219 and a multimeter for a standard load. Also put both current measuring devices in series for fun?)
 Lithium ION
Lithium ION
 Jasper Sikken
Jasper Sikken

 Simen Sollihøgda
Simen Sollihøgda