 Ted Yapo
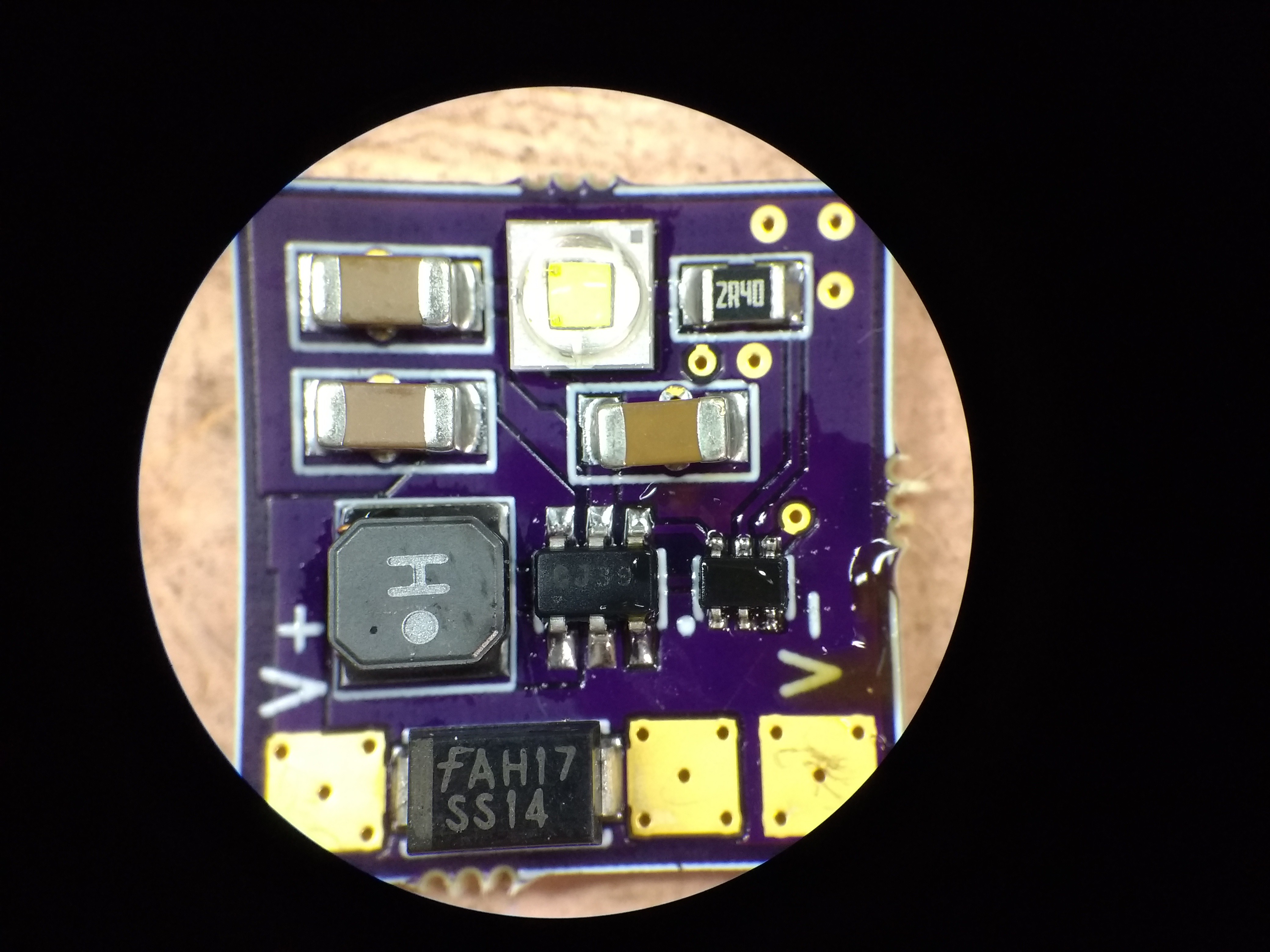
Ted YapoI had a chance to assemble one of the LED driver boards today. It's funny how your perspective changes: I felt relieved by the "large" size of the SOT23-6 package after placing the SC70-6.
The circuit is supposed to provide constant current to the LED, and hence approximately constant power. To test this, I swept the supply voltage while measuring the current drawn. Unfortunately my setup uses an LM317 so is limited to around 1.25V on the low end. I keep meaning to swap in an LT3080, but never seem to get around to it. Here's what I was able to measure:
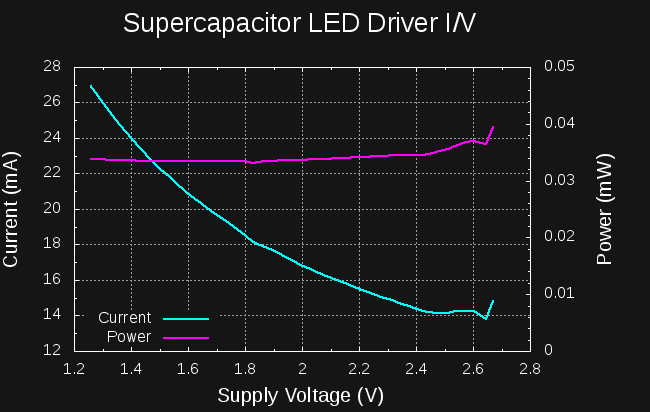
As expected, the current increases as the supply voltage drops (cyan curve). The power stays approximately constant at 35mW (magenta curve). At the LED design current of 10mA, the LED has a forward voltage of about 2.7V, so the converter (a MCP1624 boost) would have to be a buck after that point. As it is, the current increases very quickly beyond 2.7V. This is, quite coincidentally, the maximum voltage for the supercapacitor(s), so the LED will protect the caps by dissipating excess charging power. Since the LED is rated for 1A (when properly heatsinked), this isn't a bad protection mechanism. You can't crank 1A into the thing for very long with a modified servo.
There is some weirdness to this circuit, though. Take another look at the I-V curve. The current drops with increasing voltage. That's a negative resistance, and it's a recipe for oscillation and stateful behavior (hysteresis). For instance, I tried to cheat and measure lower supply voltages by using a series resistor and large capacitor to drop the voltage. The board got stuck in a high-current (~60mA) state at around 0.35V (the LED was on). This current was enough to maintain a large voltage drop across the series resistor, maintaining that state. Turning up the voltage eventually snapped out of that state, then continued to behave "normally" as the voltage was reduced. I'm not really worried about this behavior - in use, this board will be driven from a capacitor with a minuscule ISR.
Braking == Breaking
I busted two servos in the past week, both plastic gear types. The gears stripped while I was testing charging capacitors with them. Interestingly, the one I've used for years is also plastic, and I couldn't figure out how it had lasted so long. On one hand, it was a genuine Futaba, from when that really meant something vs the cheapest no-name servos I could find on ebay. But then it hit me - the capacitors are different, too. In 2001, supercapacitors had crazy high ISR - enough resistance to limit the charging current and hence the force on the servo gear train. Modern supercapacitors present essentially a dead short to the generator, making it very hard to turn and really stressing the gears.
Lesson learned: only use metal gear servos.
So, I modified a metal gear servo for continuous rotation. All I had to do was pop out a pin that had been press-fit into one of the gears (see the pin on the gear to the right, below). A light tap with a finishing nail and a hammer did the trick.

I wired up the converted servo to the test board and a 2F 2.7V capacitor. I haven't finished testing it yet, but three full turns of the servo horn (which doesn't turn easily!), gives about 70 seconds of very bright light, which suddenly drops to a dim glow for another 20 seconds before going out. I haven't measured the voltage during this process yet, but I suspect the capacitor isn't charged anywhere near 2.7V. I need to print a real crank for more tests - my fingers hurt from turning the servo horn.

I also found that these inexpensive flashlights use a Cree LED, which looks like an XPE-series. In any case, the lens used in the flashlight is a great match for focusing the LED I've chosen. I think I will have to come up with a printed housing to hold the lens and LED.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.