0%
0%
North Star
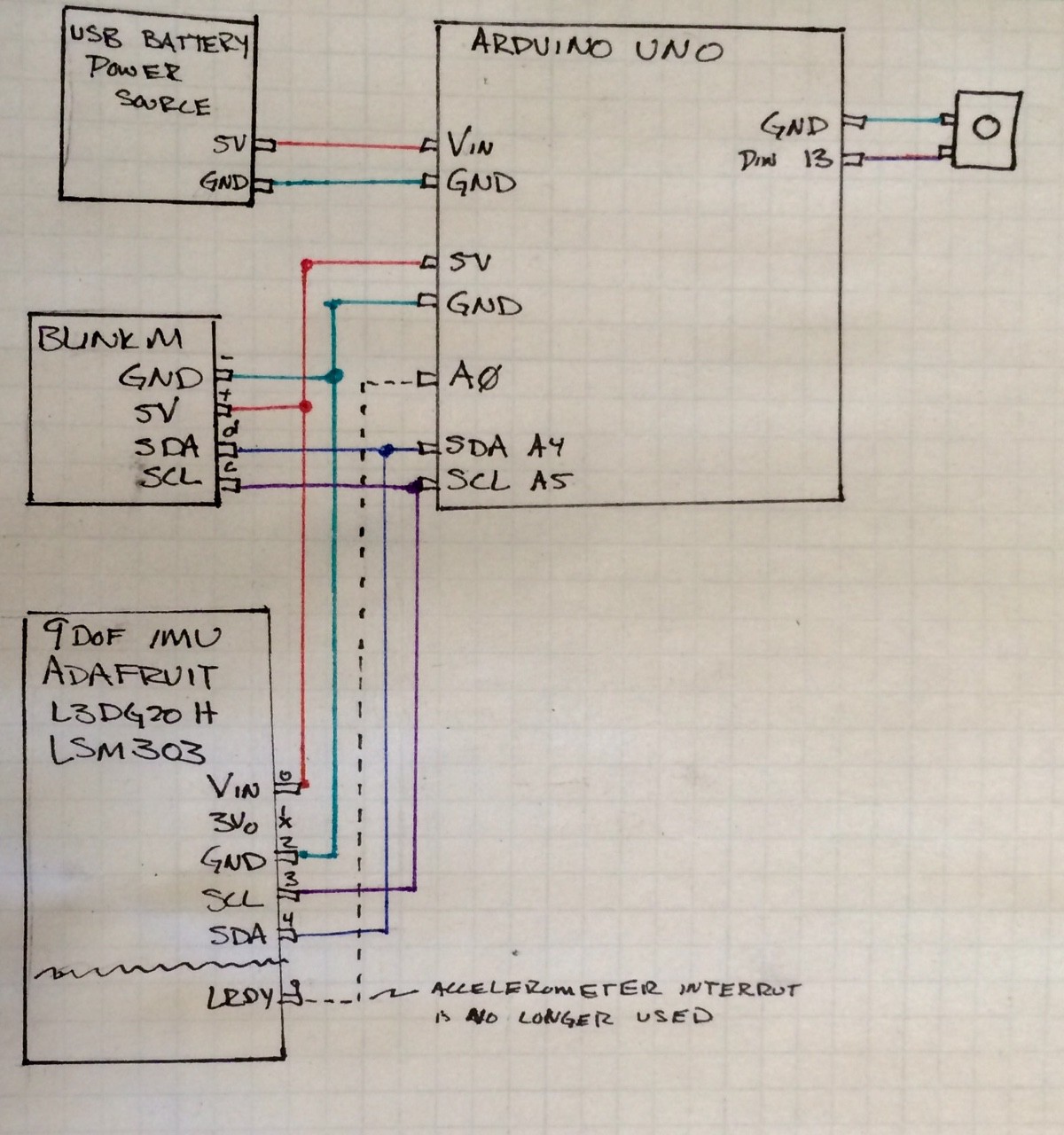
I've got an IMU in my pocket and it wants out.
 Elecia White
Elecia WhiteBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 Sarah Petkus
Sarah Petkus
 The Feature Creep
The Feature Creep
 Kevin Arne
Kevin Arne
please help me to construct / get a 3 axis Aurdino magnetometer.