 Andreas Hoelldorfer
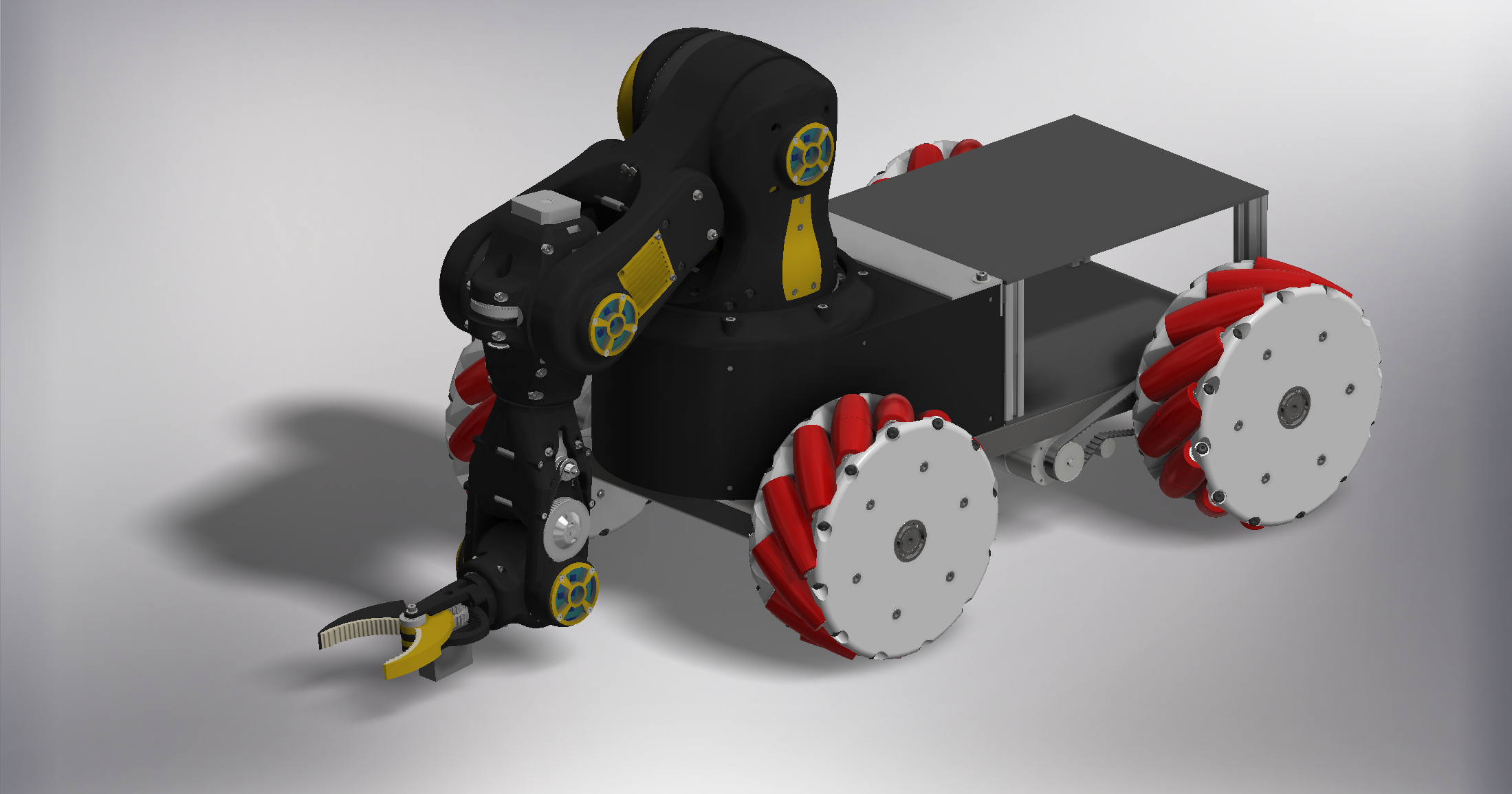
Andreas HoelldorferThat's where I'm currently heading ( My 2019 ) :
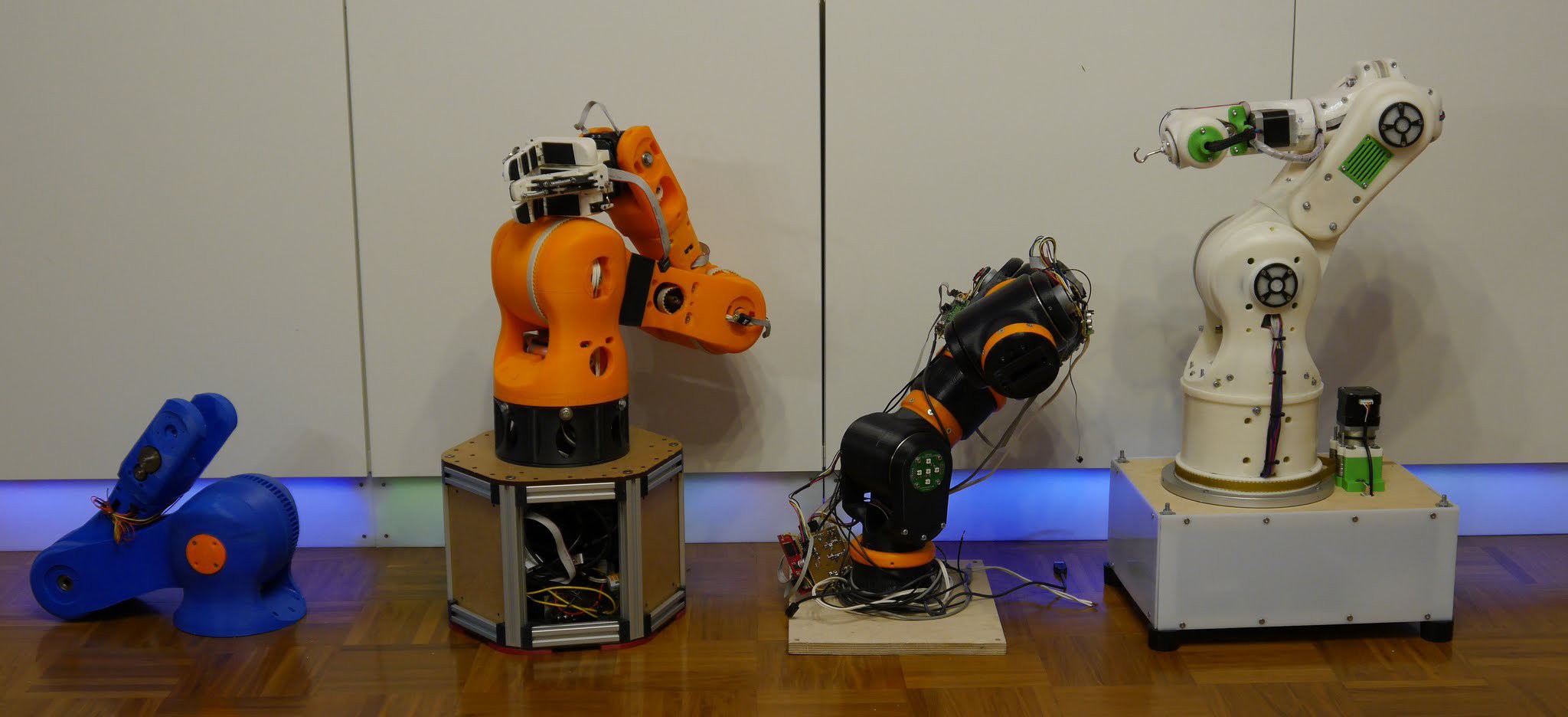
The four robots I build since this project started.
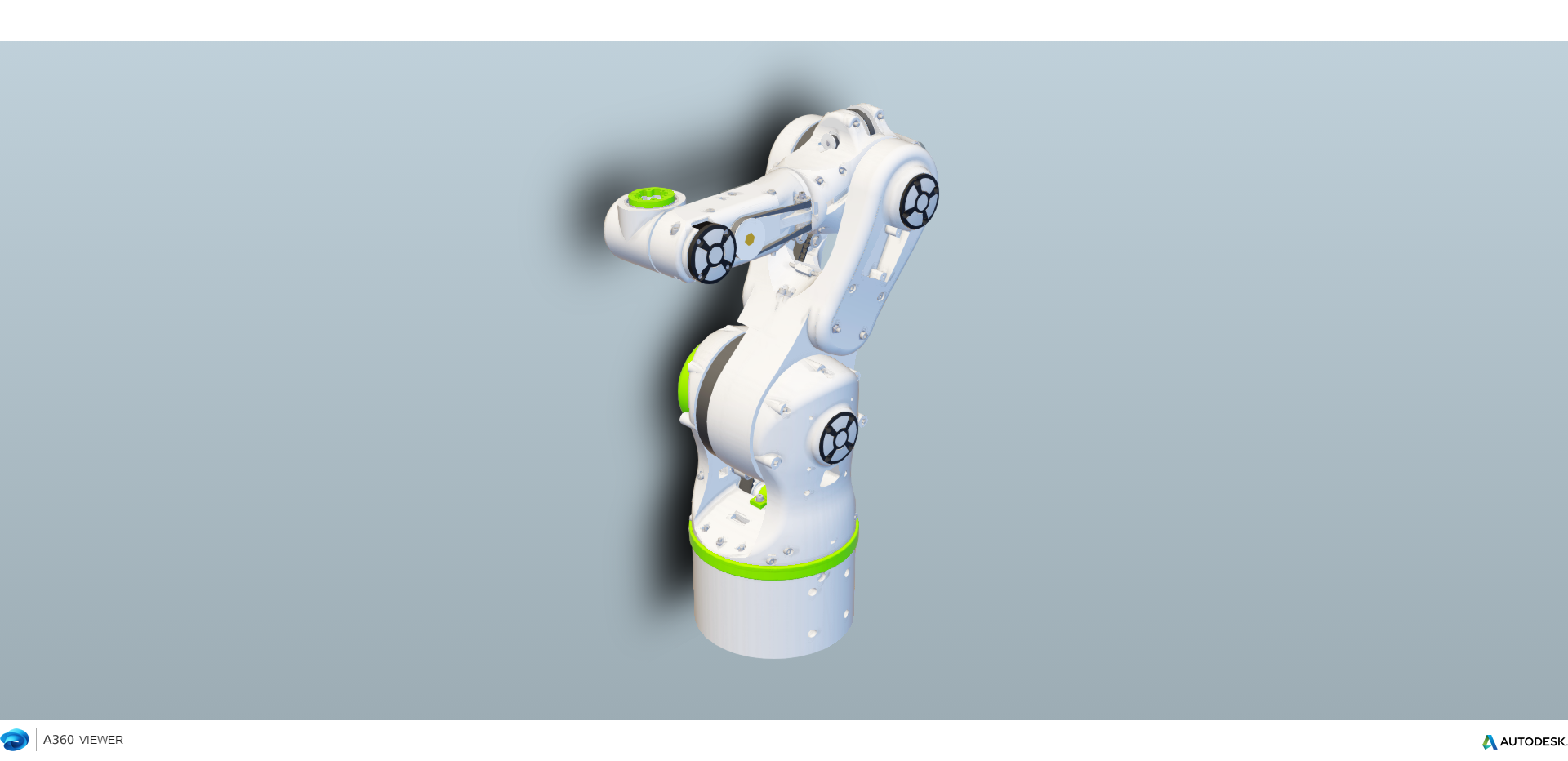
 Version 4 now nearly done and in testing.
Version 4 now nearly done and in testing.
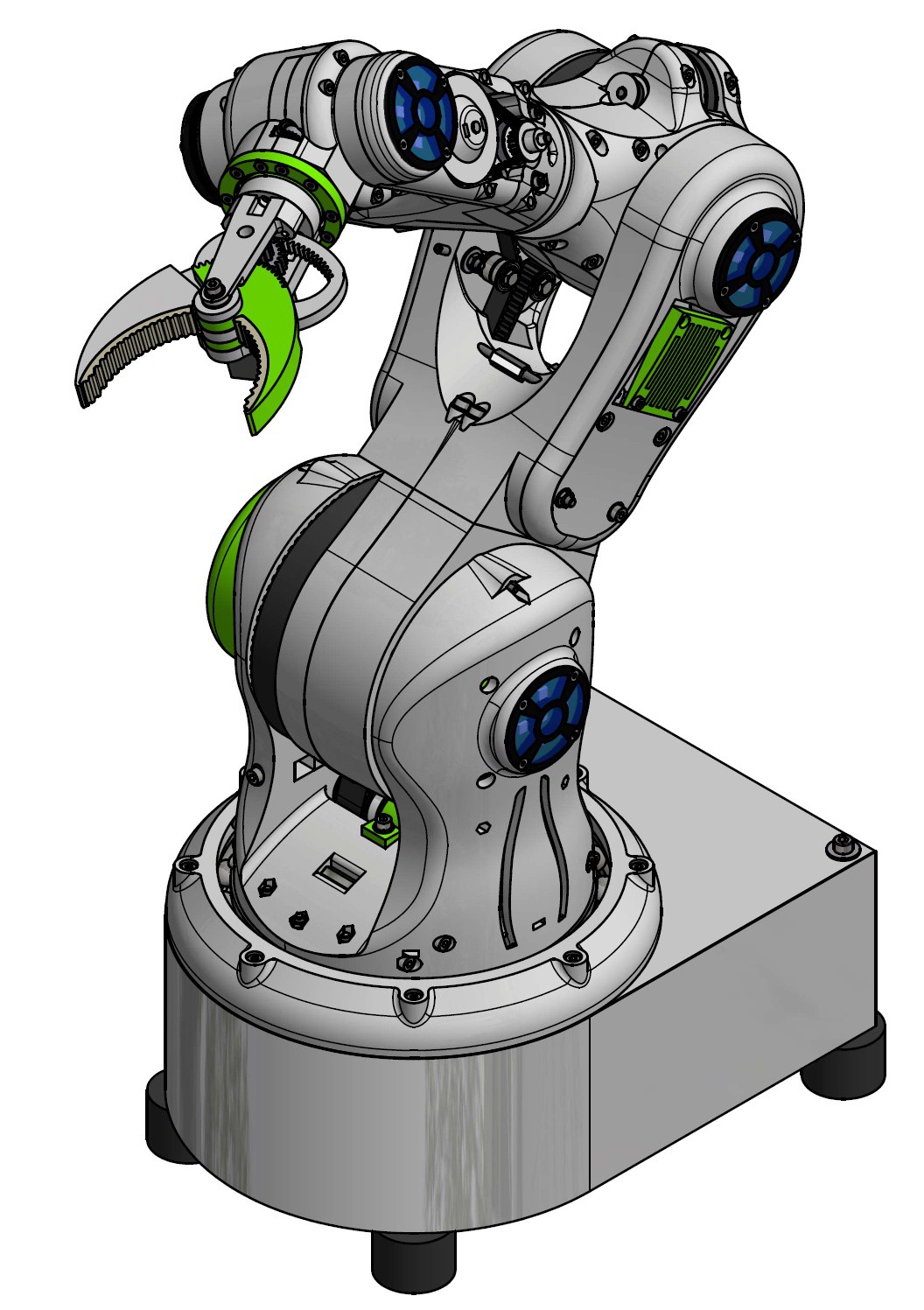
Take a look at the Gripper I designed for my Robots:
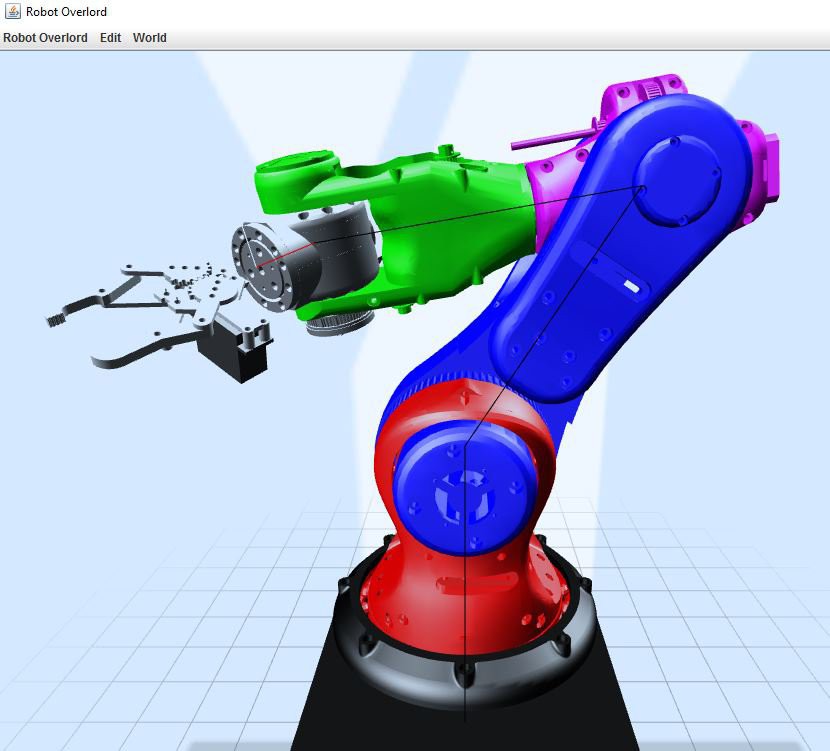
Version 4 is now nearly complete:
I also started uploading the files on github:
https://github.com/4ndreas/BetaBots-Robot-Arm-Project
And a components list for version 4:













 Erik Knutsson
Erik Knutsson
 Mykolas Juraitis
Mykolas Juraitis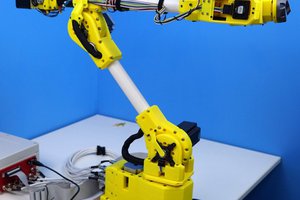
 Dan Royer
Dan Royer
 AdityaPrakash23
AdityaPrakash23
Hi Andreas, Your design is quite impressive. You seam to have the problems with the software thaw. There are some programming platforms for the robots available, but they are too simple (like just few sliders and the timeline to store poses in relation to time nodes), or too complicated (like ROS RobotC or even Arduino solutions). In our company (link below) we produce tobots for education (hardware) and we've created the software platform to run them. This platform (RobLAB) is inpired by the real - industrial robot software, but it's dedicated for the education purposes, so it's not related to just one construction (kinematics) - in fact you can define any crazy kinematics you want and controll it the proper way. There's even reverse kinematics for most tipical constructions (Puma, Scara, Delta, Portal) to enable eazy programming and controlling. There are two REAL programming languages implemened - Melfa Basic (of Melfa/Mitsubishi robots) and ISO (G-code) - so if you learn how to program your own robot, you will be able to program the real thing (real industrial robot). There's even the 3D simulation available in the definable environment with the phisics. RobLAB was dedicated to our robot with our proprietarry controller, but we are working on moving to the Arduino platform to give the independent constructors oportunity to actually use their wonderfull constructions the right way. Please, let me know if You're interested in getting the demo version for testing. http://mechatronik.pl/programy-2/oprogramowanie-roblab-detail#filmy-i-foto