0%
0%
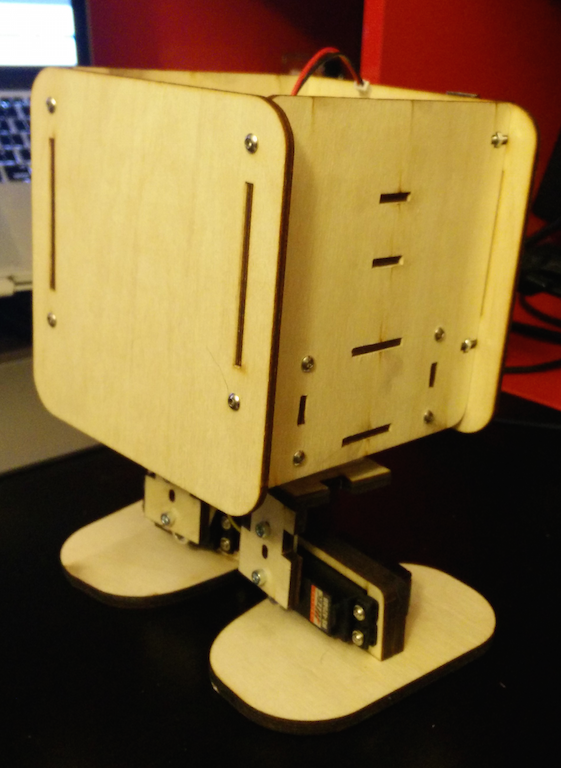
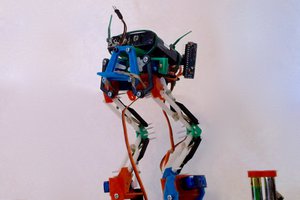
BoB Edison
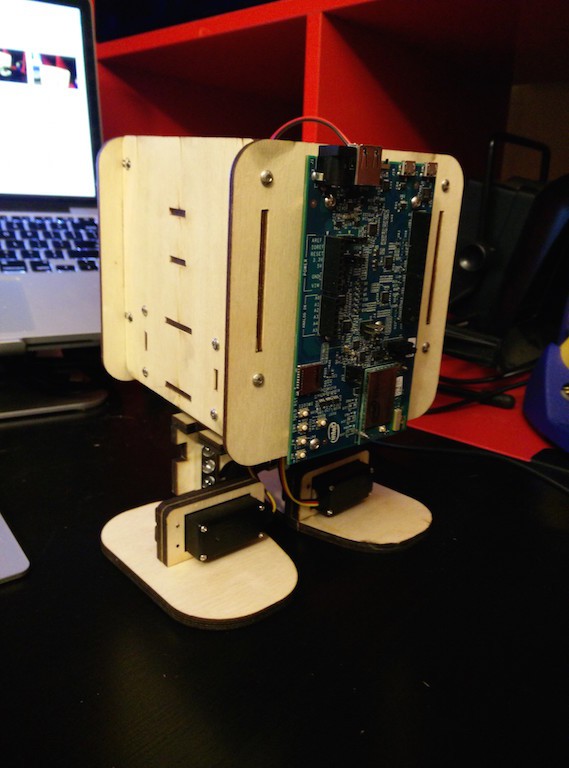
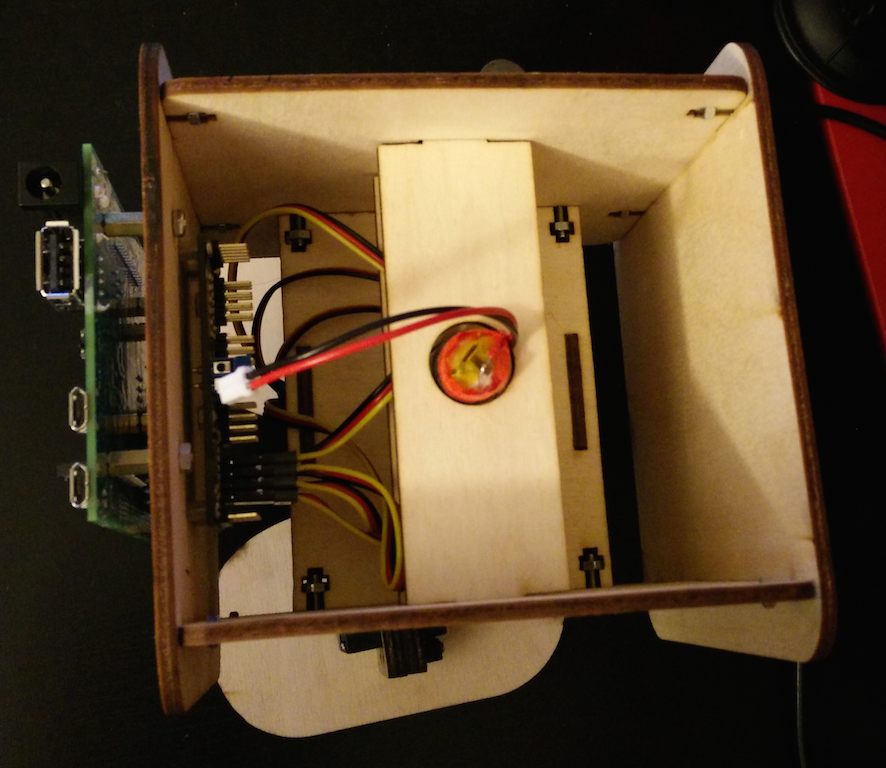
A biped based off the BoB pattern. However it is using an Intel Edison as the controller and is taller than the standard BoB.
 HappyFox
HappyFoxBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Hooptie J
Hooptie J
 jeromekelty
jeromekelty
 The Big One
The Big One
 Martin Vincent Bloedorn
Martin Vincent Bloedorn
This fella is great!
You could stick a usb hub and some flash drives in the body, have him work as a walking file server ;-)