 Carl Bugeja
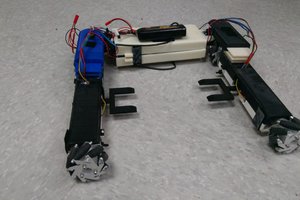
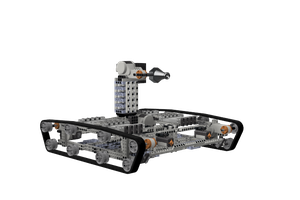
Carl BugejaFlypod is a four legged drone, that is capable of both aerial and terrestrial locomotion.
Why use a coaxial rotor?
Although quadrotors are a safer design choice and allows the drone to carrying a heavier payload, they are less energy efficient than twin rotors. A ducted coaxial-rotor is lighter, safer, compact and more efficient. Its also cooler.
Why have four legs?
Multi-legged robots are expensive and complex to control. But their adaptive leg locomotion allows them to walk on uneven terrains. The leg’s symmetrical design also allow the robot to move in any direction, without the necessity of reorienting itself.
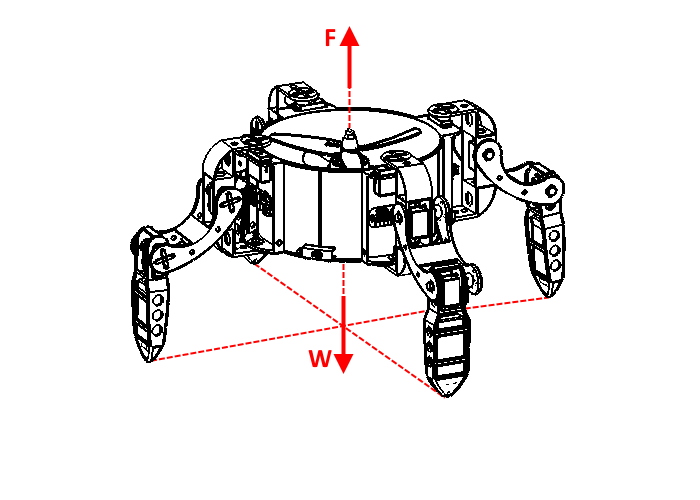
How does it fly?
The battery of the robot is split into four cells, and each cell is housed into the 3rd linkage of the four legs. In flight the robot can be balanced using centre-of-gravity shifting by extracting its legs in and out. This would control the roll and pitch angles. The yaw angle can be regulated by adjusting the speed of the twin propellers.



 Cirmall
Cirmall
This is awesome! If you ever end up designing a slightly larger version, I have a 9.25" (I think) diameter mandrel-formed CFRP tube I'd be happy to donate to the cause.