 Duane Degn
Duane DegnHere's a video of the robot in action. Sorry about talking so much before I start demonstrating the robot. The robot doesn't start moving until near the 2:00 mark.
0%
0%
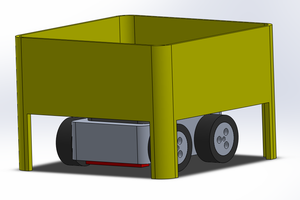
Mecanum Wheeled Rover 5
I added a set of Vex Mecanum wheels to a Dagu Rover 5 platform.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Endbots
Endbots
 Cirmall
Cirmall
 MiKa
MiKa
 EK
EK
This is a "Featured Project" on Hackaday.
Cool!