0%
0%
Clock Clock
My attempt to put together a digital clock made of analog clocks, as originally created by Humans since 1982 and David Cox
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 mircemk
mircemk
 Mrlim
Mrlim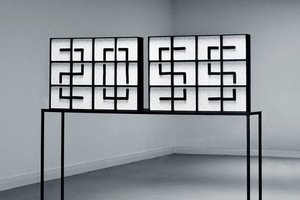
 Jac Goudsmit
Jac Goudsmit
hi, it is awesome this work. Do you have a list of all components, so that I can buy them for a friend, who can build up this clock then for me? Kind regards Knut