0%
0%
 CLo
CLoBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

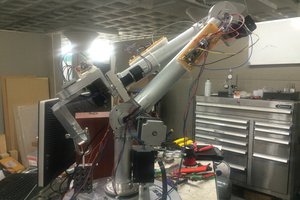
 In ARM 2.0 (scrapped almost immediately) each joint was designed around a direct coupling of the motor to the joint. This proved to be quite a challenging and fun thing to design and machine, but not so great in terms of arm functionality. The motor at the elbow joint increased the torque needed at the shoulder immensely as did the beefy amounts of aluminium and large bearings at each joint. I think I broke the gears in 3 or 4 of these
In ARM 2.0 (scrapped almost immediately) each joint was designed around a direct coupling of the motor to the joint. This proved to be quite a challenging and fun thing to design and machine, but not so great in terms of arm functionality. The motor at the elbow joint increased the torque needed at the shoulder immensely as did the beefy amounts of aluminium and large bearings at each joint. I think I broke the gears in 3 or 4 of these
 Colin Kingsbury
Colin Kingsbury
 Sarah Petkus
Sarah Petkus
 Val
Val