0%
0%
TwinTeeth: The PCB mini-factory
Diyouware TwinTeeth is a open-source PCB mini-factory targeted to the electronic hobbyists.
 Diyouware
DiyouwareBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 ElectroBoy
ElectroBoy
 Carl Bugeja
Carl Bugeja
 Jelto
Jelto
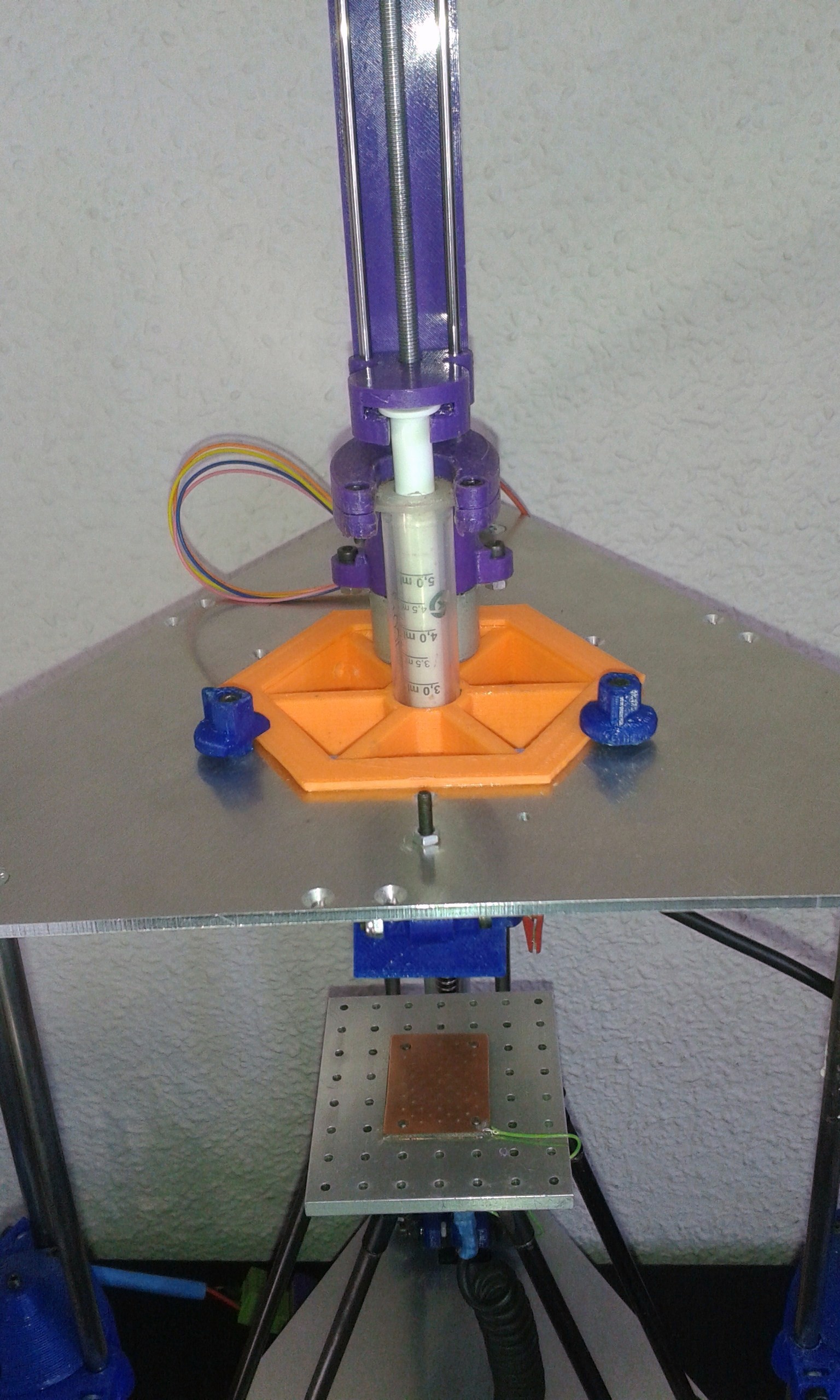
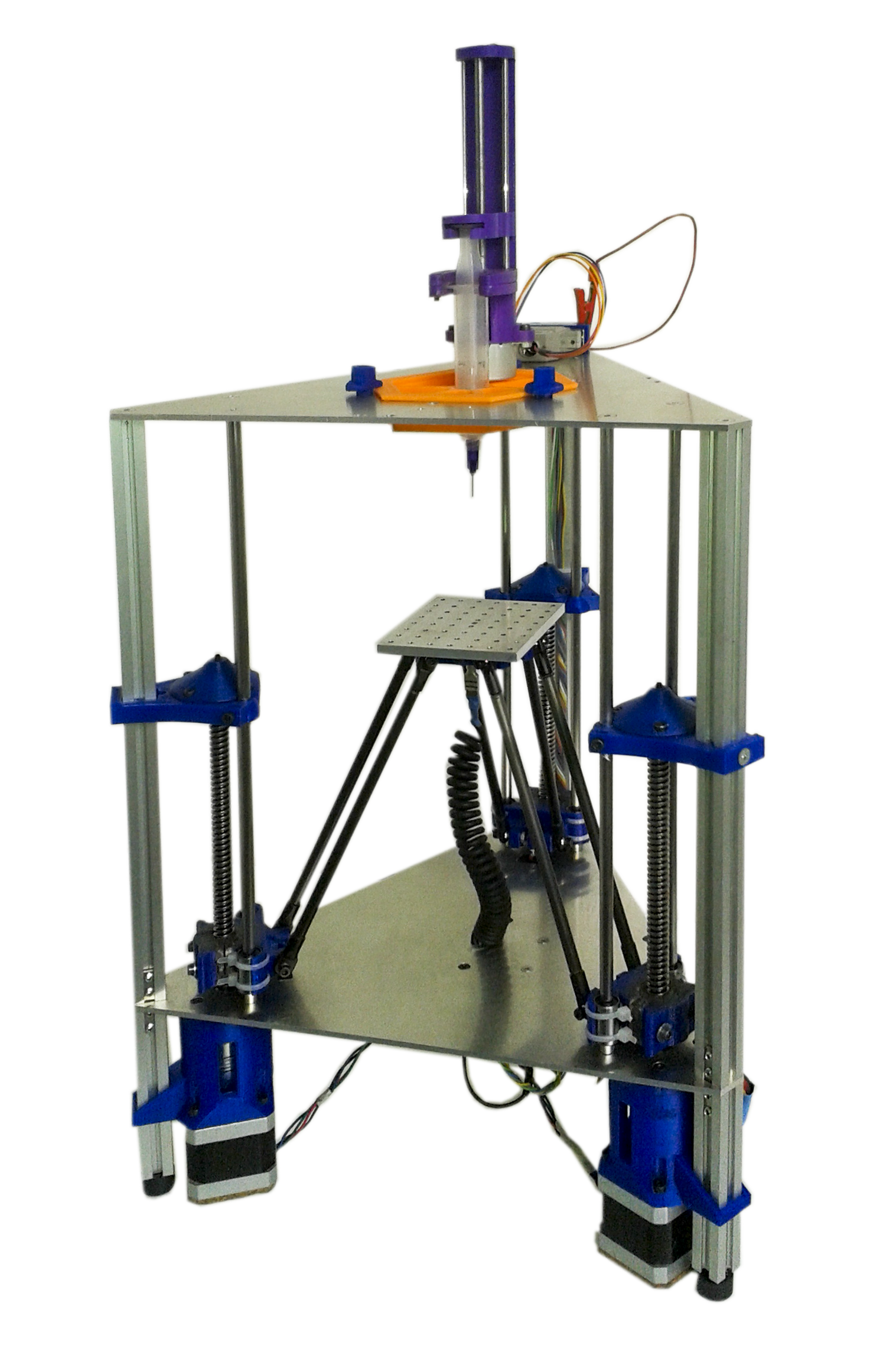
Mainly because in that configuration the laser beam is not attached directly to the motion system. We already tested a traditional cartensian robot and we could not avoid vibrations and resonances produced by the mechanics and the belts. Also the inverted delta configuration allows us to change the tool in a question of seconds. This is very important in a multi-functional robot. We don't care too much about the Z axis lenght because the robot was mainly designed to process PCBs and 3D print small things.