0%
0%
IRBE-1 (InfraRed Balloon Experiment)
Using near-infrared in near-space. High altitude balloon for Global Space Balloon Chanlenge
 roberts.trops
roberts.tropsBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


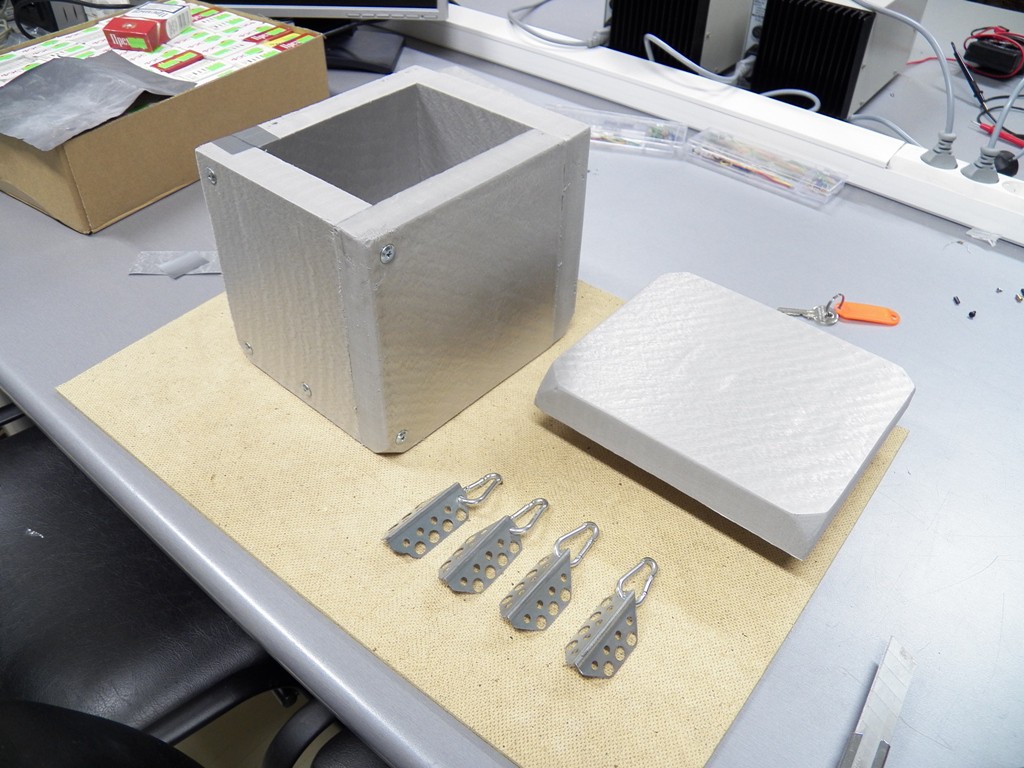
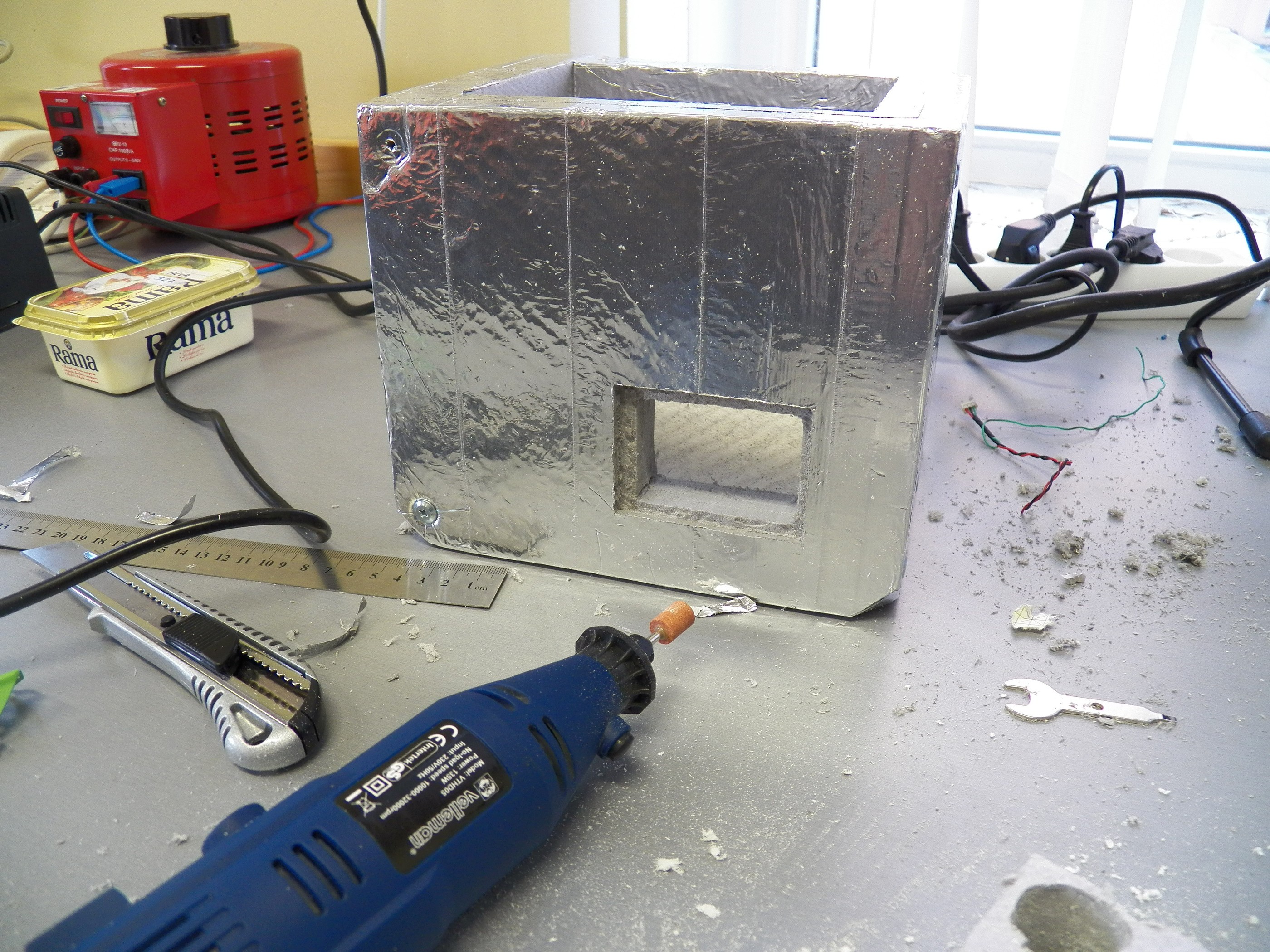 SJ4000 will capture full HD video of the flight. SJ4000 angle of view is quite wide (140 deg) and capsules walls are about 3cm thick, so if we were going to fit it inside capsule, it would require ridiculusly large lense hole. Instead camera was moved inside capsules wall. Also a plastic cover was made to prevent it from falling out of the payload. Now it fits inside nicely.
SJ4000 will capture full HD video of the flight. SJ4000 angle of view is quite wide (140 deg) and capsules walls are about 3cm thick, so if we were going to fit it inside capsule, it would require ridiculusly large lense hole. Instead camera was moved inside capsules wall. Also a plastic cover was made to prevent it from falling out of the payload. Now it fits inside nicely. 



 Fred Fourie
Fred Fourie
 Radu Motisan
Radu Motisan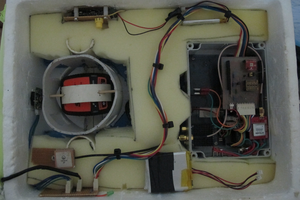
 Joseph Turner
Joseph Turner