 Alexandru Budisteanu
Alexandru BudisteanuVisionBot Pick and Place machine will work with 24-32 feeders or 96 feeders.

VisionBot Pick and Place Machine Computer Vision - Real PCBA Test
Built in a maker homemade laboratory to enable the dreams of millions of electrical engineers, makers and hackers.
VisionBot Pick and Place test with 0603 resistors from the video.

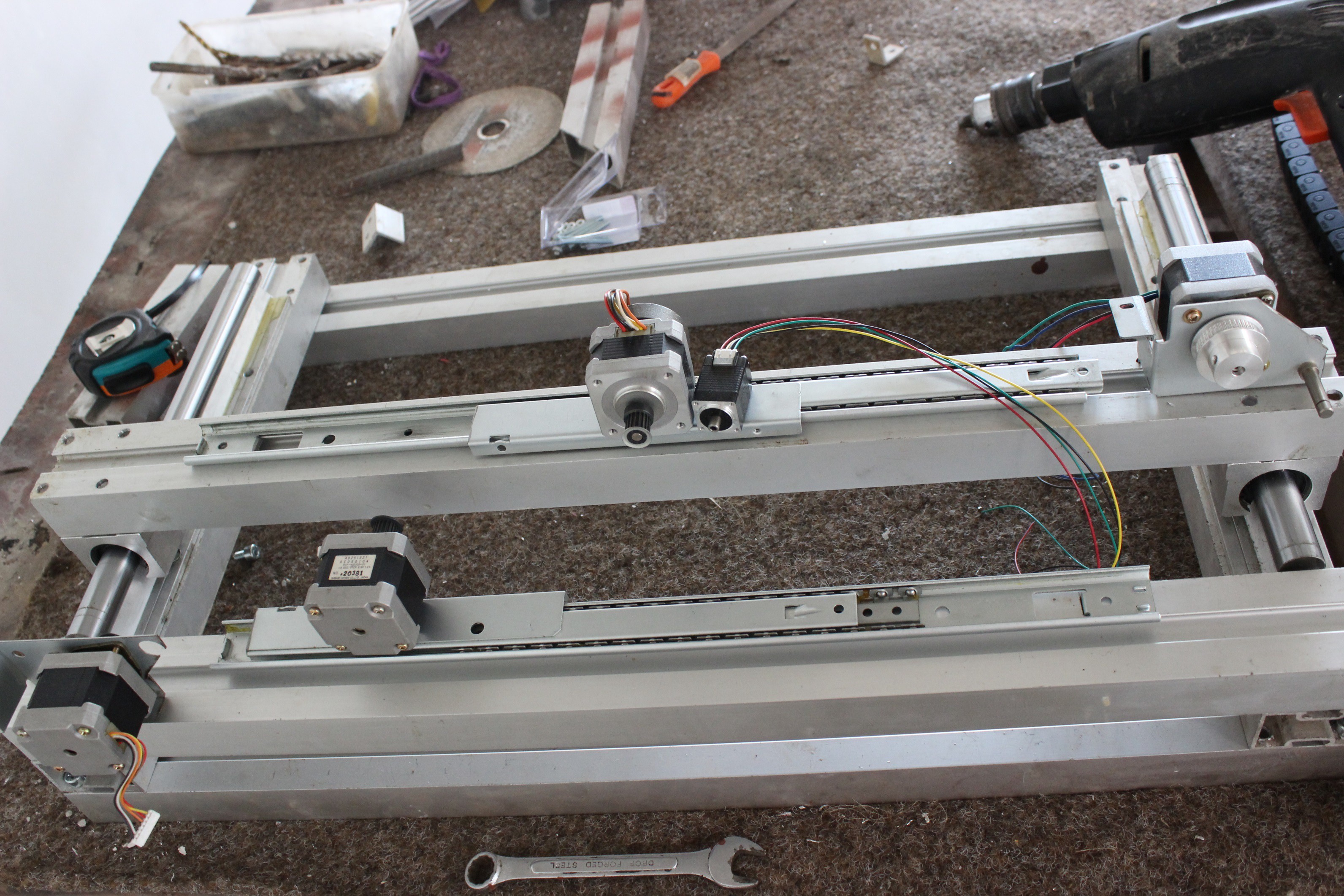
VisionBot or BIT TECHNOLOGIES RO "garage".

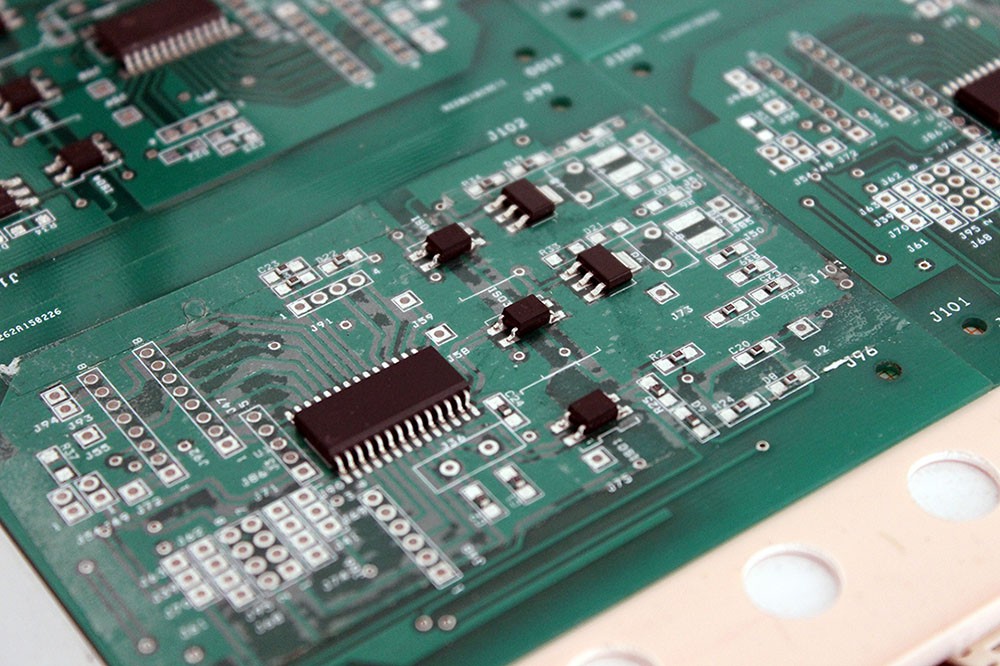
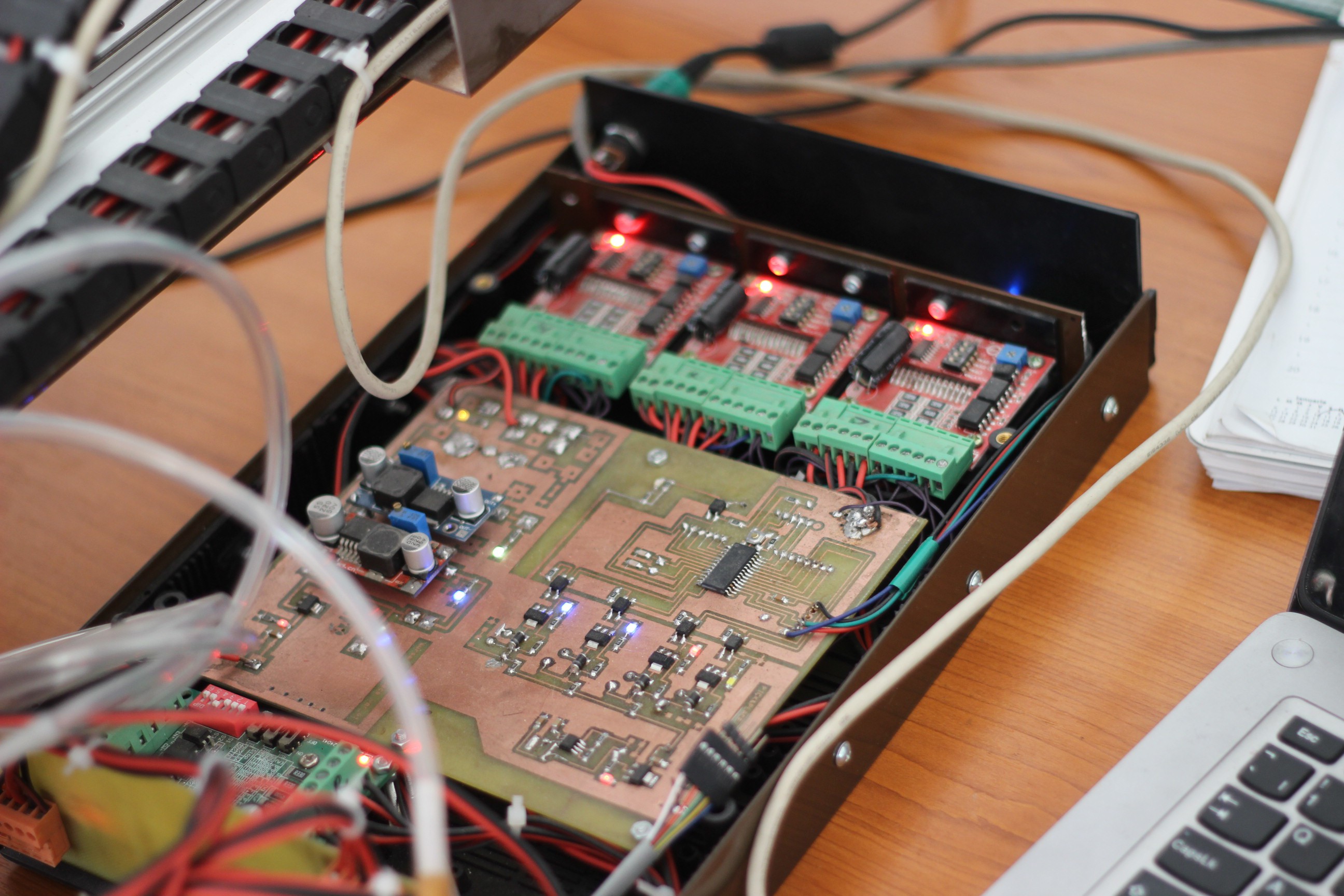
VisionBot Pick and Place main electronic board that is controlling the entire machine.
 VisionBot SMT Placement Equipment has an advanced software that is able to import layouts directly from RS-274X Gerber files
VisionBot SMT Placement Equipment has an advanced software that is able to import layouts directly from RS-274X Gerber files







 Jack Black
Jack Black
 Vittorio Ferrari
Vittorio Ferrari
 Tim Wilkinson
Tim Wilkinson
 iSax
iSax
What makes yours different from everyone else currently re-inventing the pick and place machine?