 Alexandru Budisteanu
Alexandru Budisteanu-
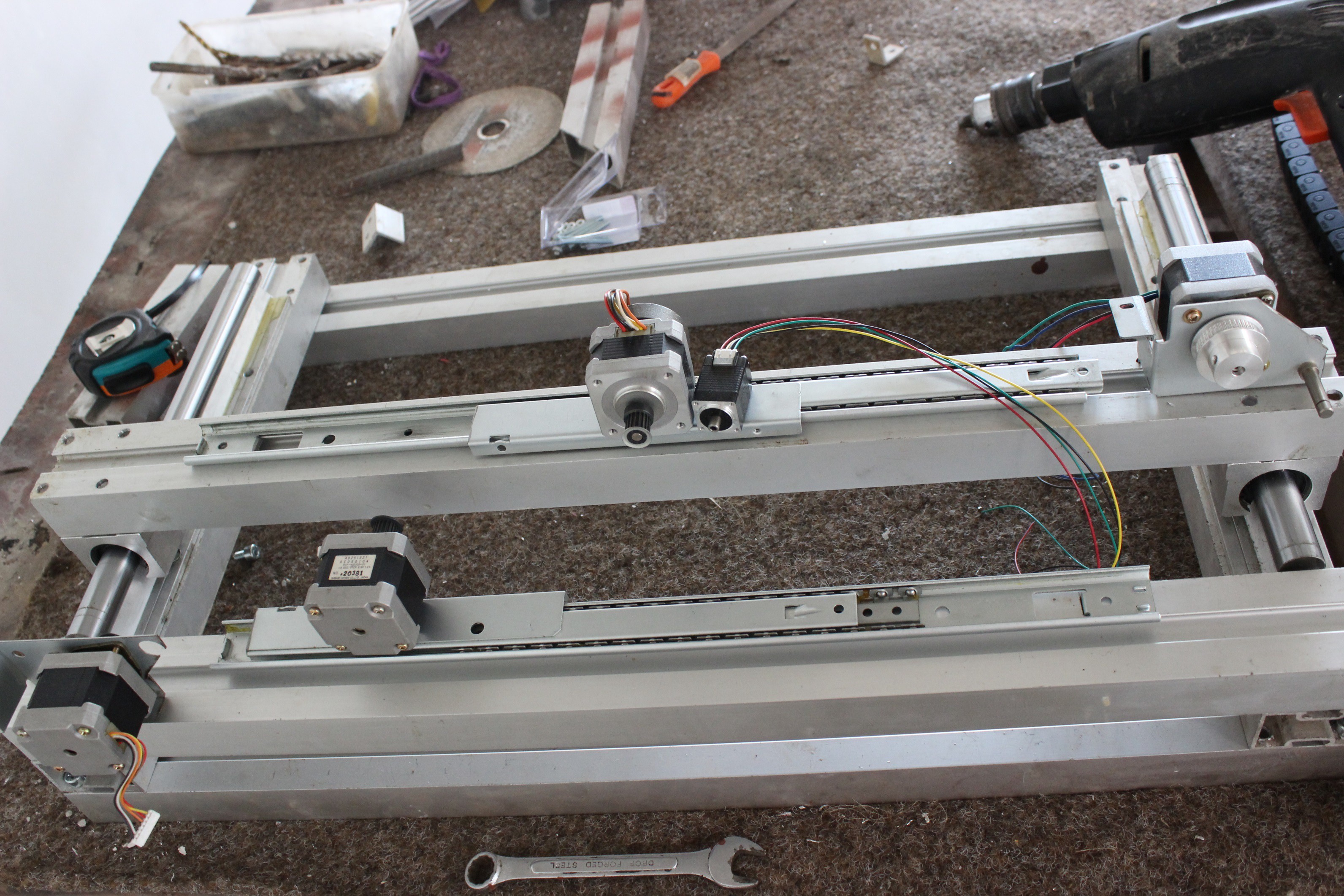
1Step 1
First you must build the skeleton of the machine itself.
![]()
-
2Step 2
Must write a desktop software which comunicates with your machine firmware. The mechanical parts are controled by the desktop machine itself.
![]()
-
3Step 3
fter I placed the four stepper motors on the skeleton of the robot, I was able to continue developing (mostly on the PIC18F4550 firmware software which reads the data sent by the computer software and controls the stepper motors). I also tested the Electronic Solenoid Valve and found that the valve works.
![]()
-
4Step 4
The software must have a database defined by the user in order to know the relative position where you can find the electronic components.
![]()
-
5Step 5
![]()
![Building VisionBot Pick and Place machine]()
-
6Step 6
![Assembly VisionBot Pick and Place machine and test the first time]()
![]()
-
7Step 7
The 3D Model of the VisionBot affordable SMT Pick and Place machine
![VisionBot affordable Pick and Place machine]()
-
8Step 8
VisionBot got a gold medal at the Romanian National Innovation Exhibition
![Ionut Alexandru Budisteanu gold medal VisionBot]()
-
9Step 9
![Ionut Alexandru Budisteanu VisionBot]()
-
10Step 10
We aquired Bernardo Lathe for Fine Mechanics
![]()
VisionBot SMT Pick and Place machines
An affordable Pick and Place machine with Computer Vision that enables makers and electrical engineers to assembly their own products.










Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
you send pic18f4550 with completely diagram machine circuit board interface hardware. How can control feeder and motor ? . Because i read you part list you send just IC . How can my machine work i dont know paython i need complete machine just assembled and after working directly
Are you sure? yes | no