 Les Hall
Les Hall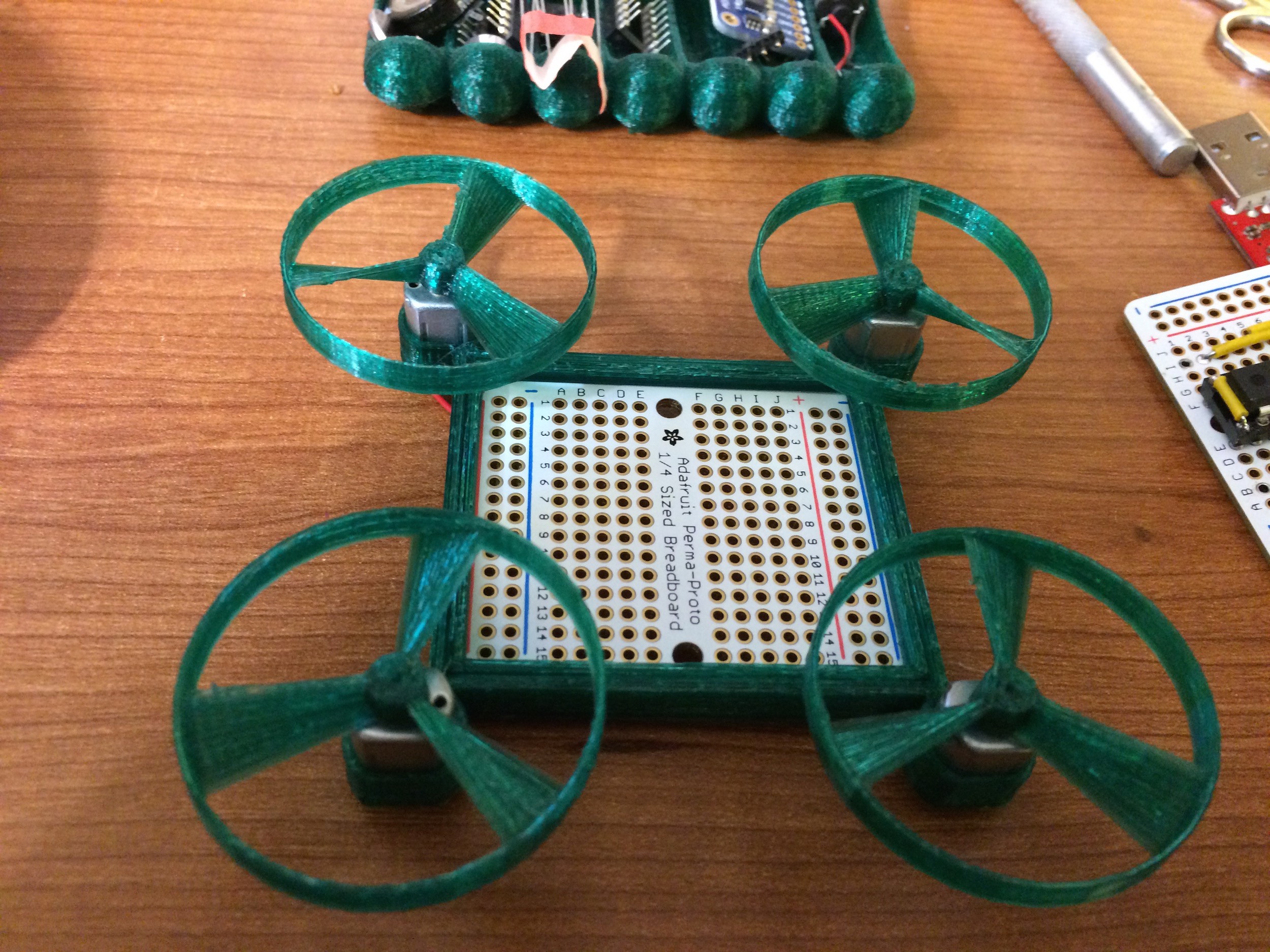
The photo above shows the 3d printed quadcopter that I designed. i have no idea if it will fly. The motors are 1.5-3.0 Volt DC motors but they are not the skinny type typically used for quadcopters. also part of their airflow is blocked by the circuit board. On the plus side I found an ADXL335 accelerometer and I will mount it off-center in an attempt to detect rotation with it. Unfortunately I have no gyro.
The purpose of the quadcopter will be to hover in place. That's it, just hover with no controller. That's my first baby step in moving toward an autonomous drone fleet. If the motor and propeller arrangement is not strong enough to lift the craft, I will try to make a more capable frame for the board.
I plan to solder the circuitry together soon (I have to do this outside and it requires permission due to oxygen tanks nearby). I will put the ATtiny84 in the center of the board, the ADXL335 in a corner in an attempt to measure rotation by sensing the x and y common mode component. This technique may be helpful for stabilization with no gyro.
I am currently glueing the retainer in place to hold the circuit board and due to the show shaft length of the motors Ive had to glue on the propellers. Soon I will do an initial lift test. wish me luck!
Les
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Xander, thank you for your comment, communicating makes this fun! You are so totally correct it's not funny, hah! What's going on here is that I am attempting to work with what I have. The thing I'm going for is to have a few vehicles prepared for a "Christmas in April" for a friend's kids. I want to make some fun drones for them, and in my explorations I had wishfully convinced myself that by offsetting the accelerometer I have in hand, I could "sort of " detect rotation. i guess that's not true but maybe it is and would require fancy programming. Like "correct for drift and wait, then if drift got worse then correct for common mode signal which is rotation". I'm going for a truly minimal system to make a really small set of vehicles. I guess it was a combination of wishful thinking and excessive minimalism!
Also I'm happy to learn that prices have come down so much on 9DOF boards, that Adafruit board you mention makes this a practical project! I'll get one soon.
Are you sure? yes | no
Hi there! I'm also building a quadcopter application platform that I plan to play around with. I'm starting with an Arduino as the primary controller, then adding a Raspberry Pi to do some computer vision development.
I really like your idea of basically putting a breadboard as part of the platform; great extensibility, but I'm curious to know why you're using an accelerometer w/o a gryo. Turbulence from the props will cause enough stochastic movement that you'll probably need one to stabilize flight. So might as well start with one, like this one: http://www.adafruit.com/products/1714
Your modular approach is pretty similar to mine, and I hope to see you continue to make progress!
Are you sure? yes | no