 lion mclionhead
lion mclionhead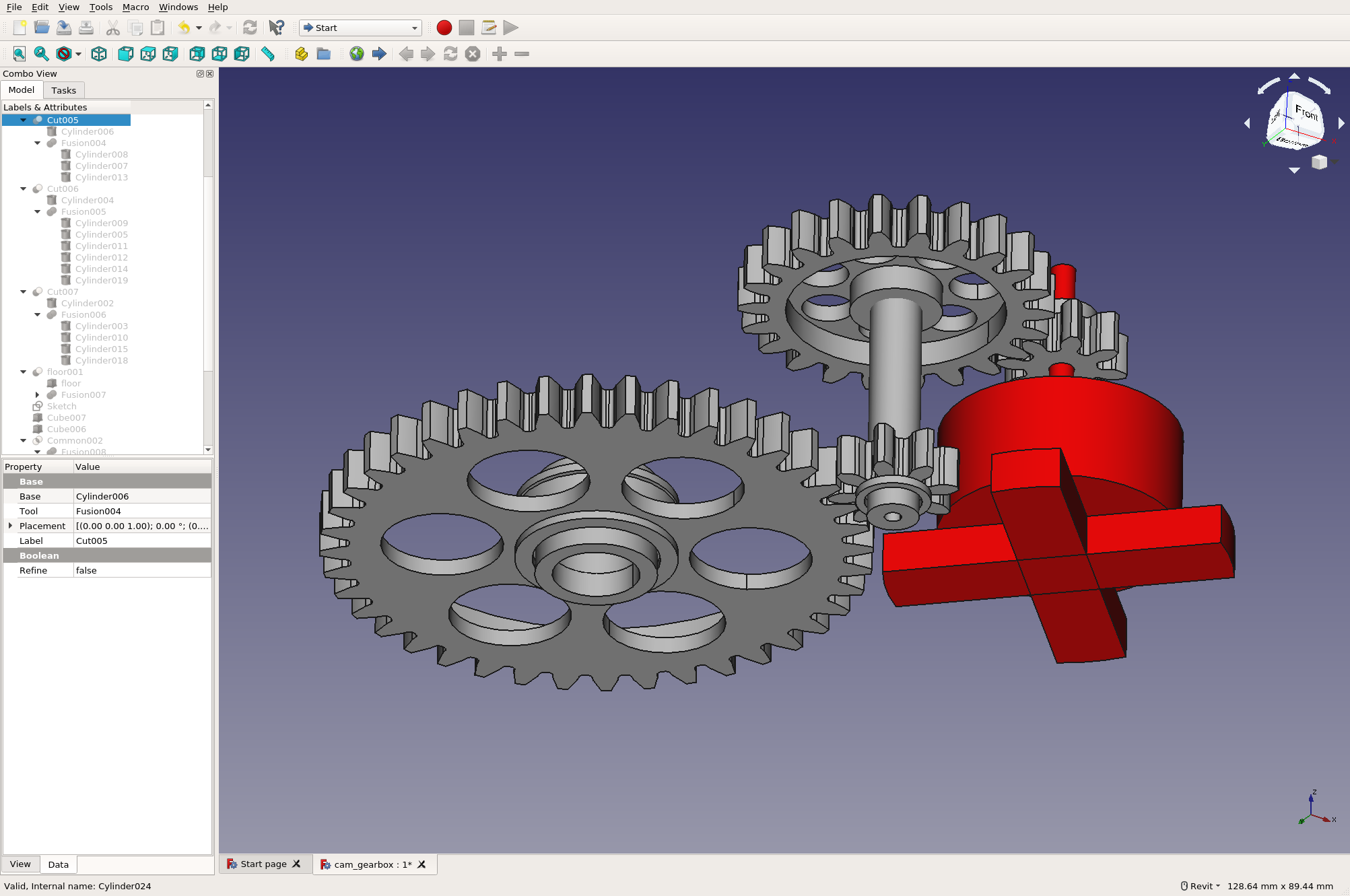
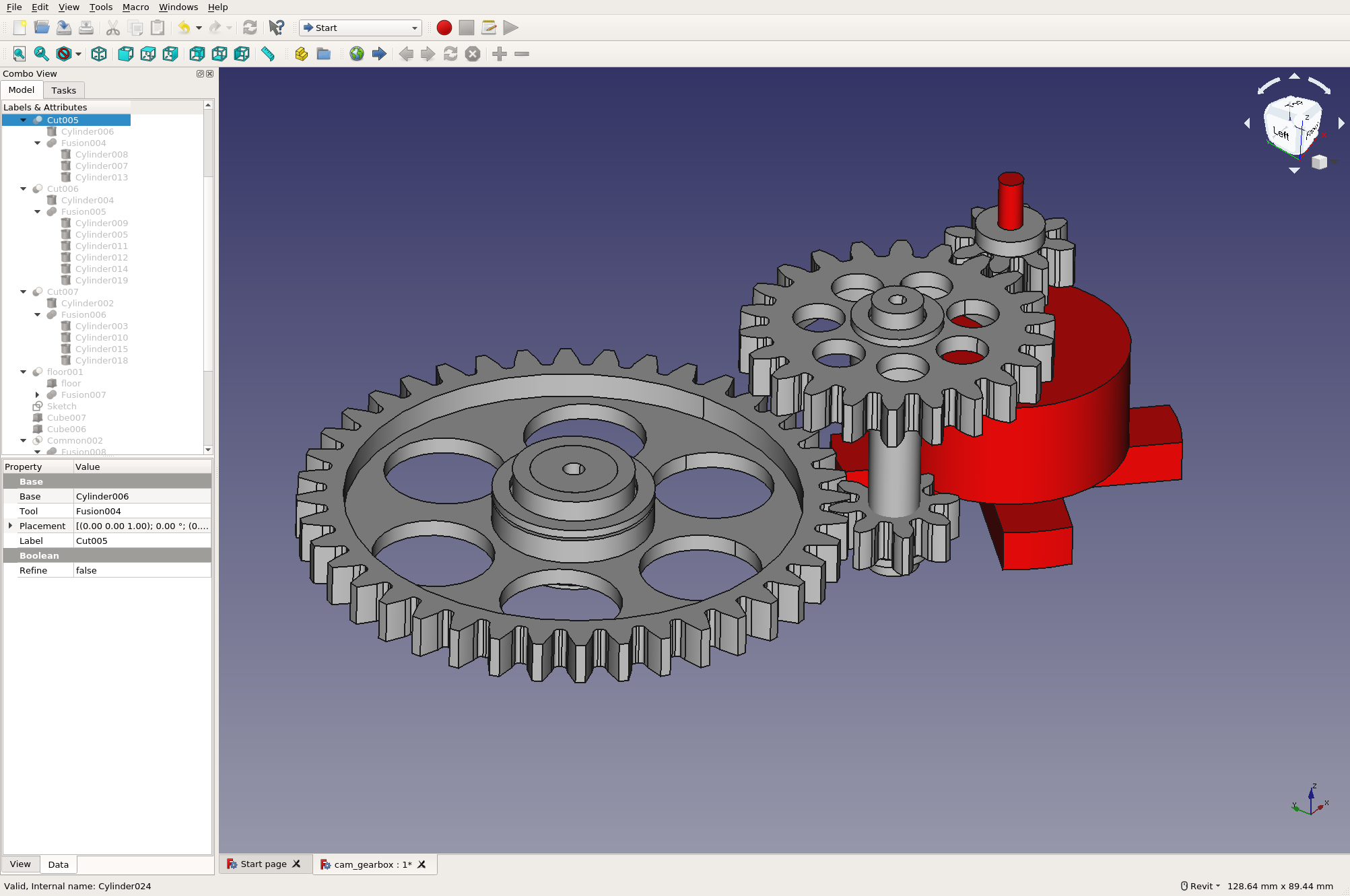
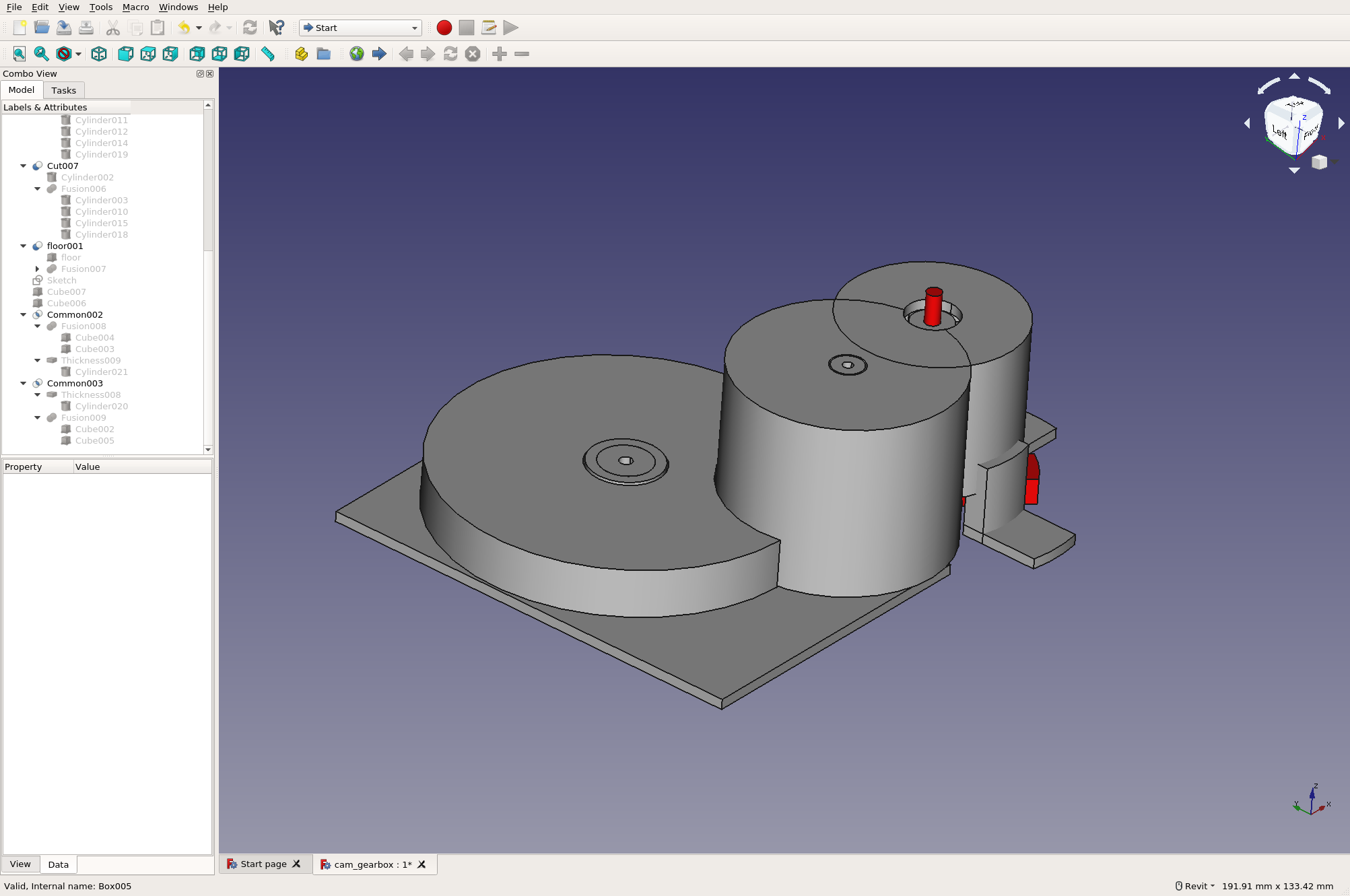
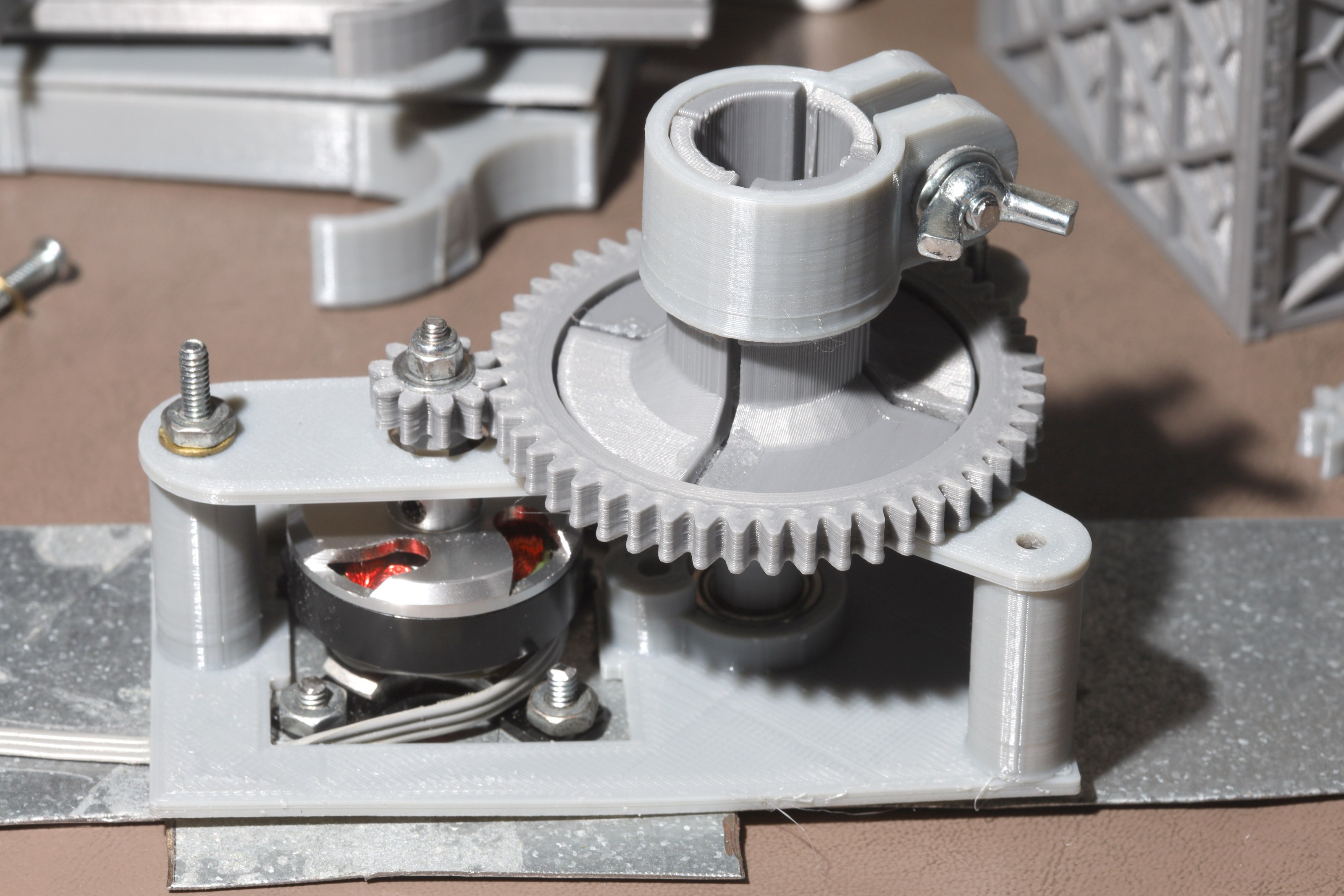
The lion kingdom designed a 13:1 gearbox for camera panning, only to encounter exponentially growing complexity when it came to structures to support the gears, enclosing it, making it as compact as possible, & making it printable. It ended up being a 4" wide enclosure. Maybe it could be shrunk by using the highest possible printing quality, allowing the enclosure to be less optimized.
Gearboxes are a pretty high value item, even more than lion machine interfaces. There is a limit to 3D printing imposed by the amount of work required to design the part. There has to be a huge need for a custom gearbox, but in this case there are much smaller, geared stepper motors which could do the job more efficiently. The original wishlist only called for a common hobby servo.

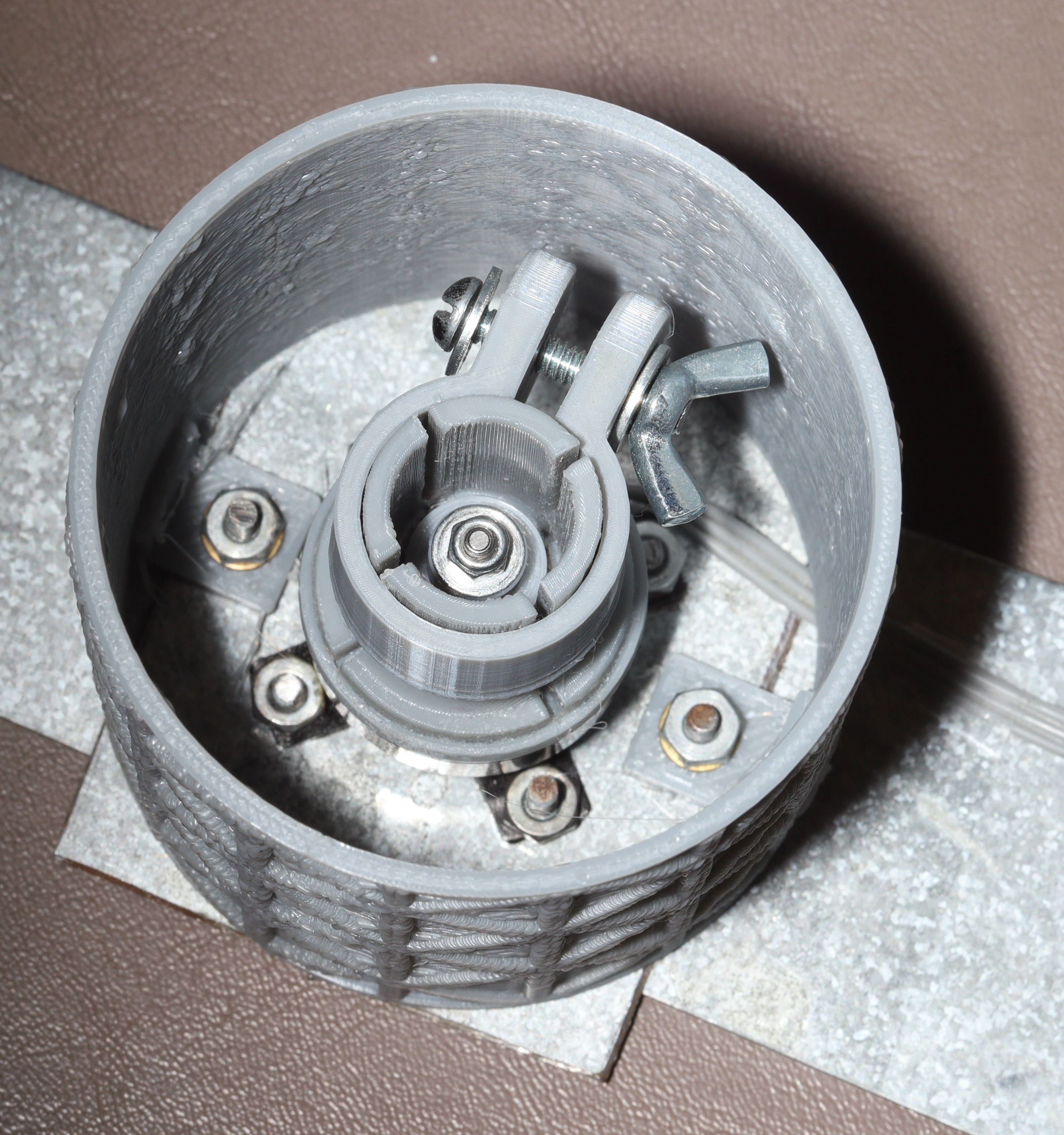
In lieu of a gearbox, it was the world's ugliest overextruded shroud. It needs to slide on inner rails to allow access to the inner fittings.
When moved over to the latest paw controller, the panning appears to stutter more, but it was also 60fps instead of 24fps. It might only look smooth because of the gopro stabilization.

The motion was so bad without a brushless gimbal feedback loop & the ugly shroud proved so useful, work resumed on a single stage 4:1 gearbox. The servocity pan/tilt mount uses a large 3.5:1 gear with winch servos to achieve real smooth panning. The winch servos perform a finite number of rotations before requiring a reset, though.
Was surprised to find the sharp corners of the paw controller weren't noticeable in the real world. It could be wrapped in rubber for extra bling, but it would just be heavier. The paw controller with square corners was much more comfortable than the wooden ones lions used since 2013.
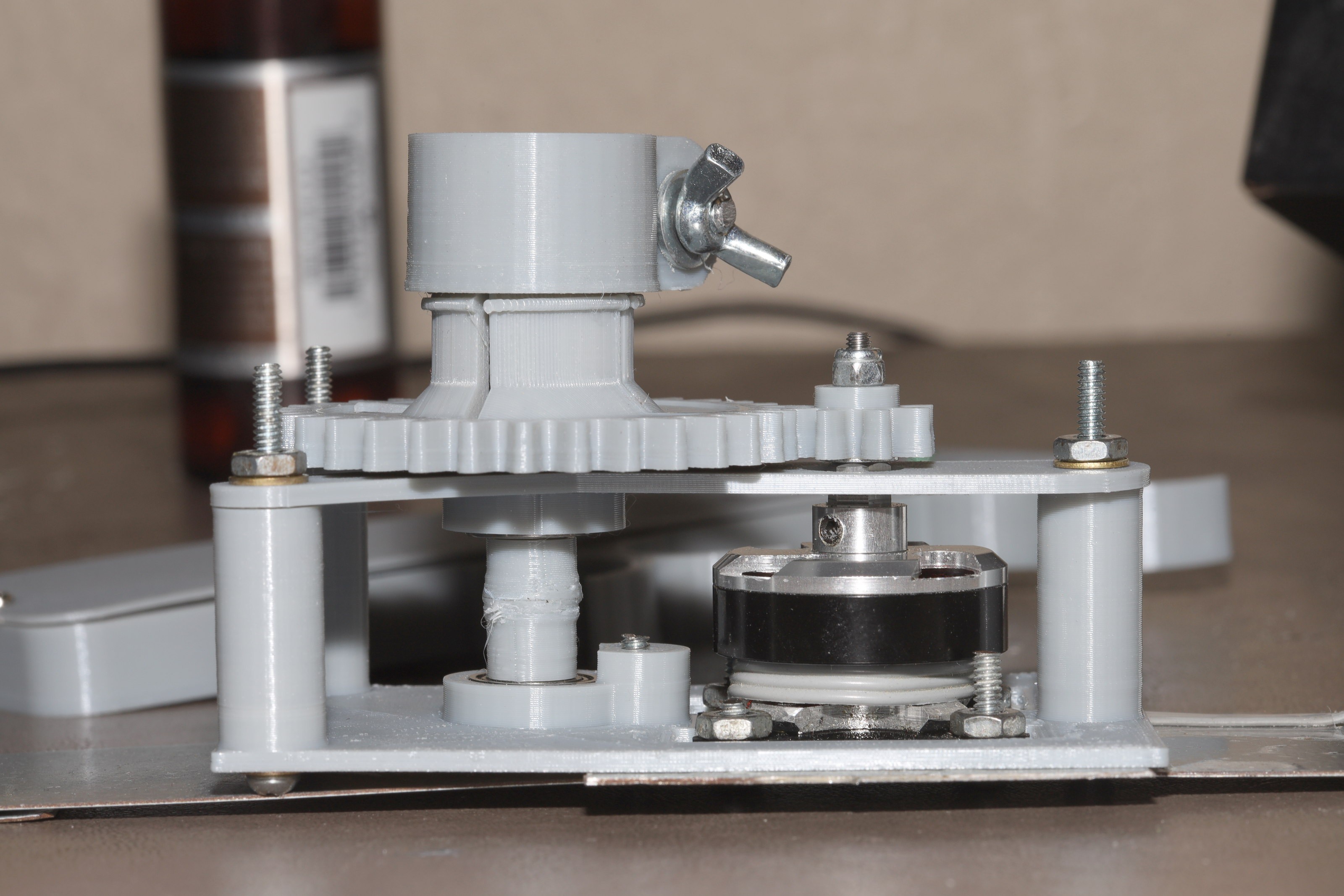
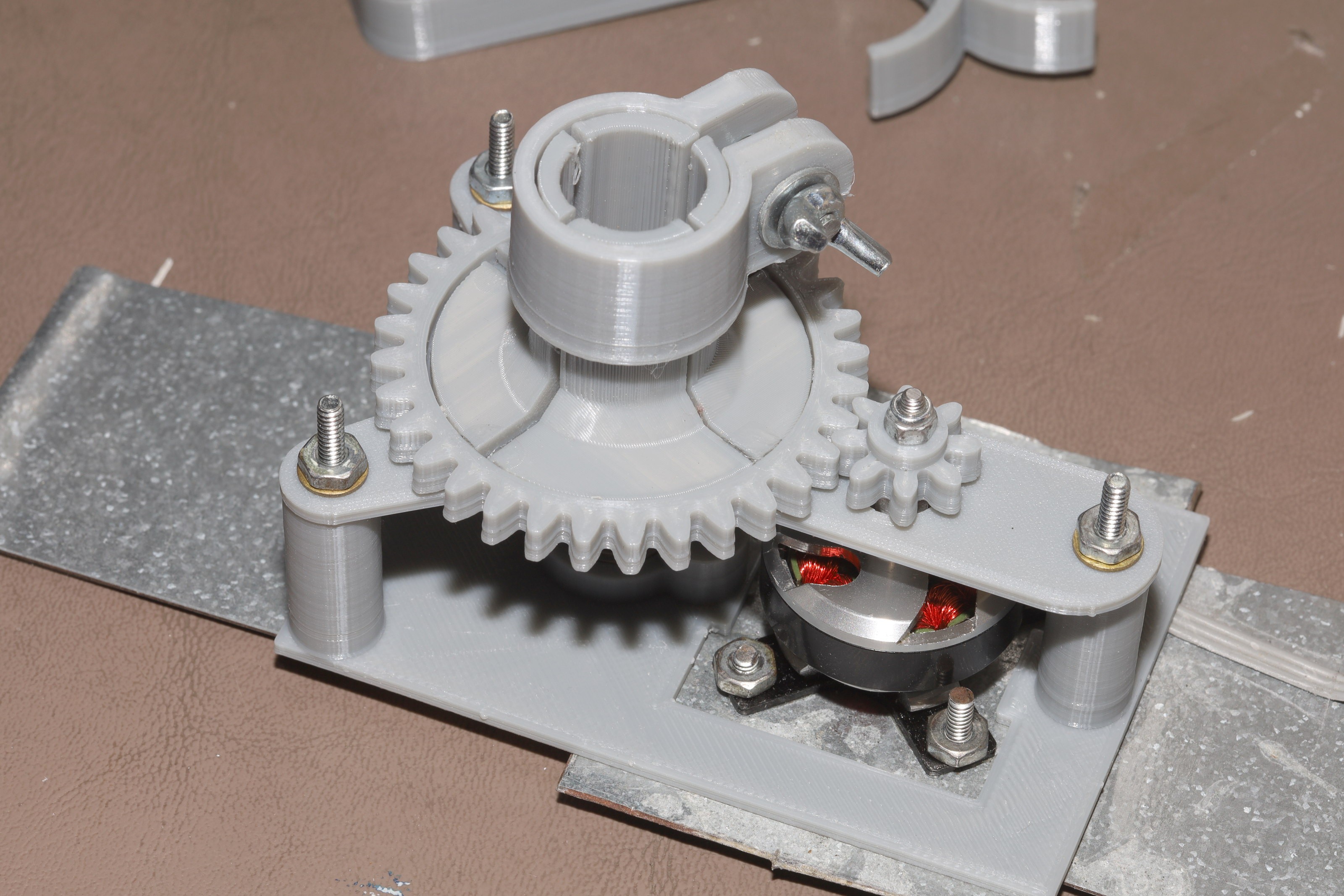
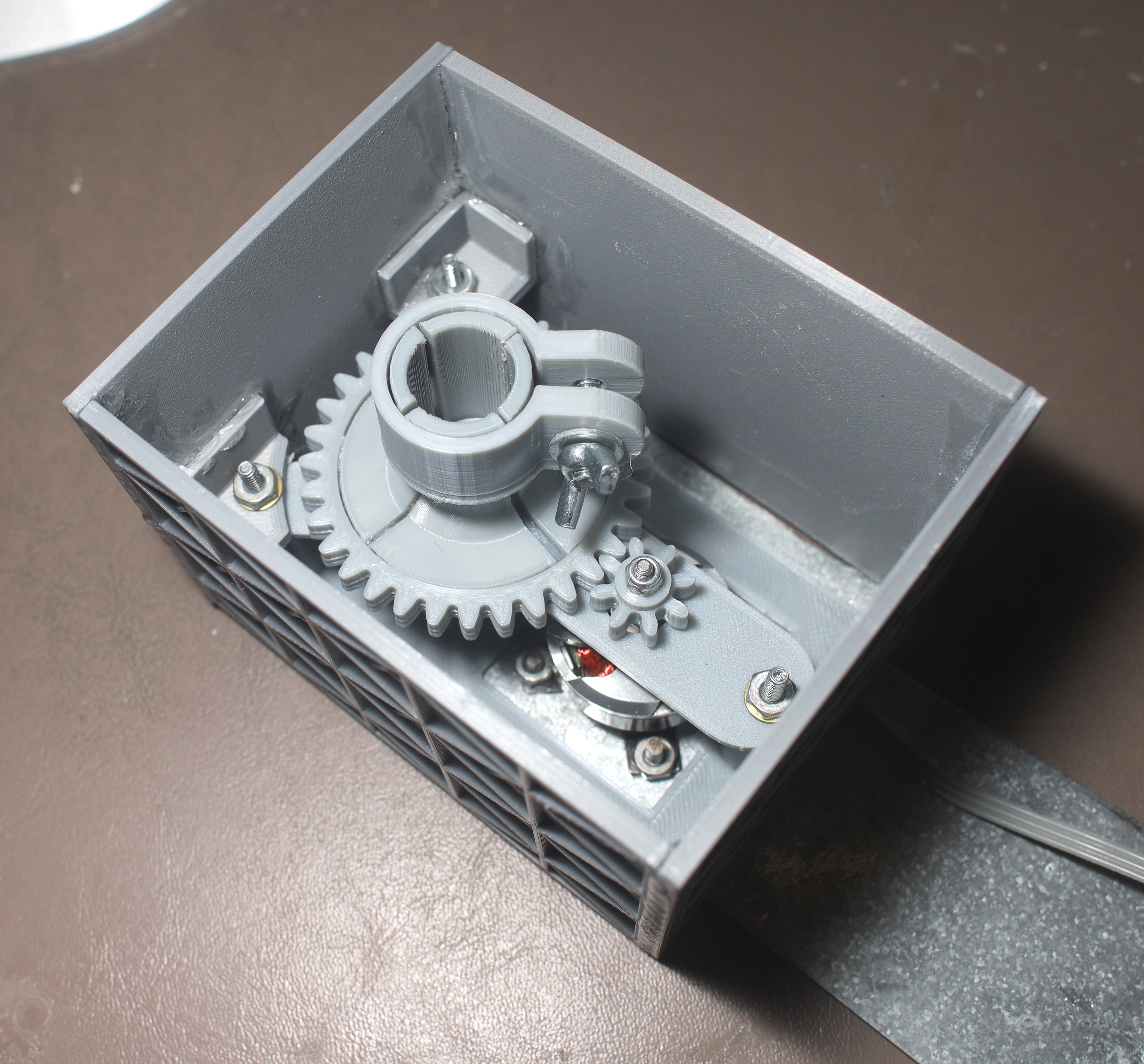
A new 4:1 gearbox reduced but didn't eliminate the cogging. Most of the last stuttering was caused by a firmware bug, but the mane contribution of the gearbox was increased torque. This used a lot of horizontal expansion tweeking in Cura to align the pinion gear. The pinion gear took only 20 minutes to print, so it was the easiest point of alignment.
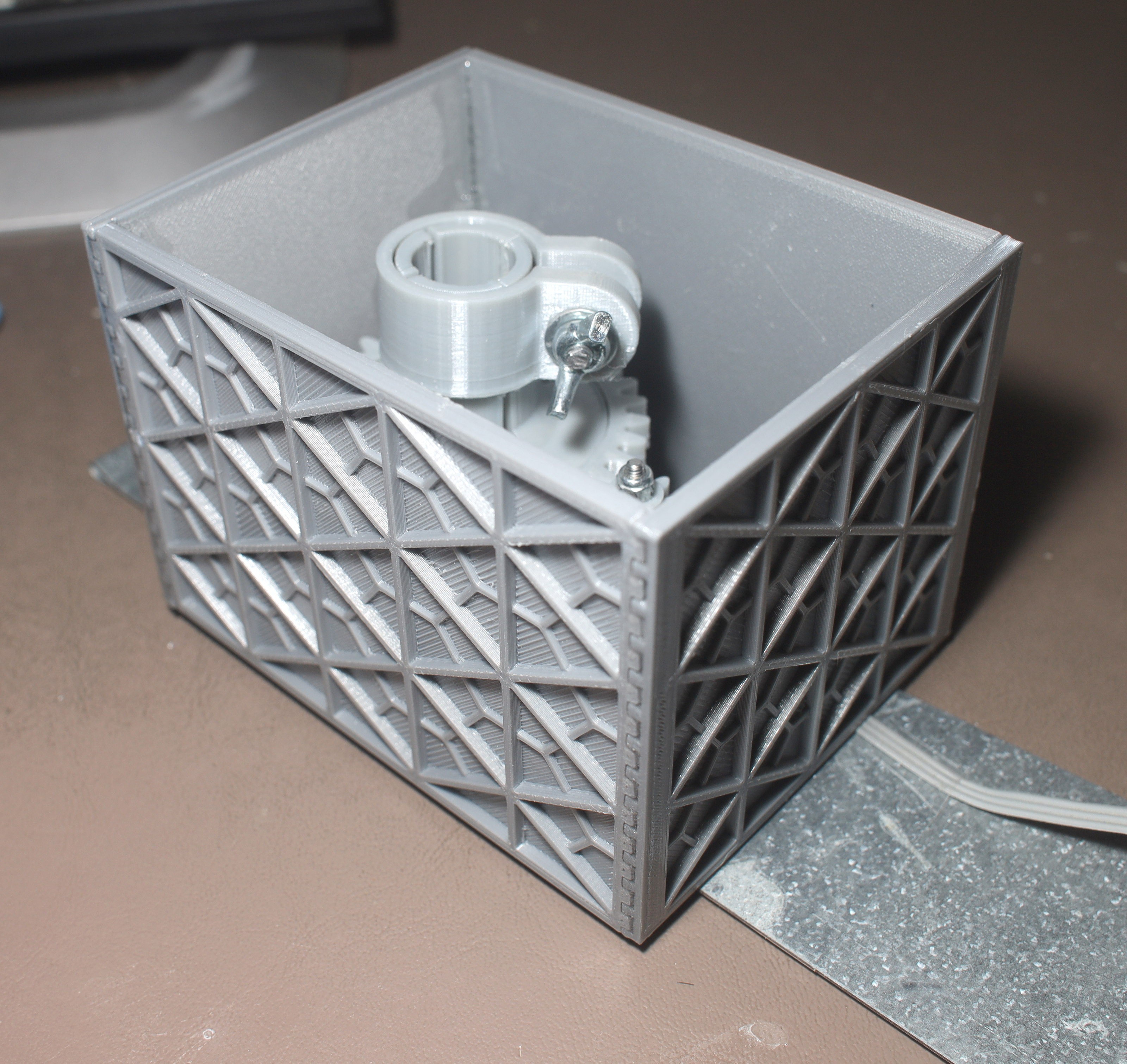
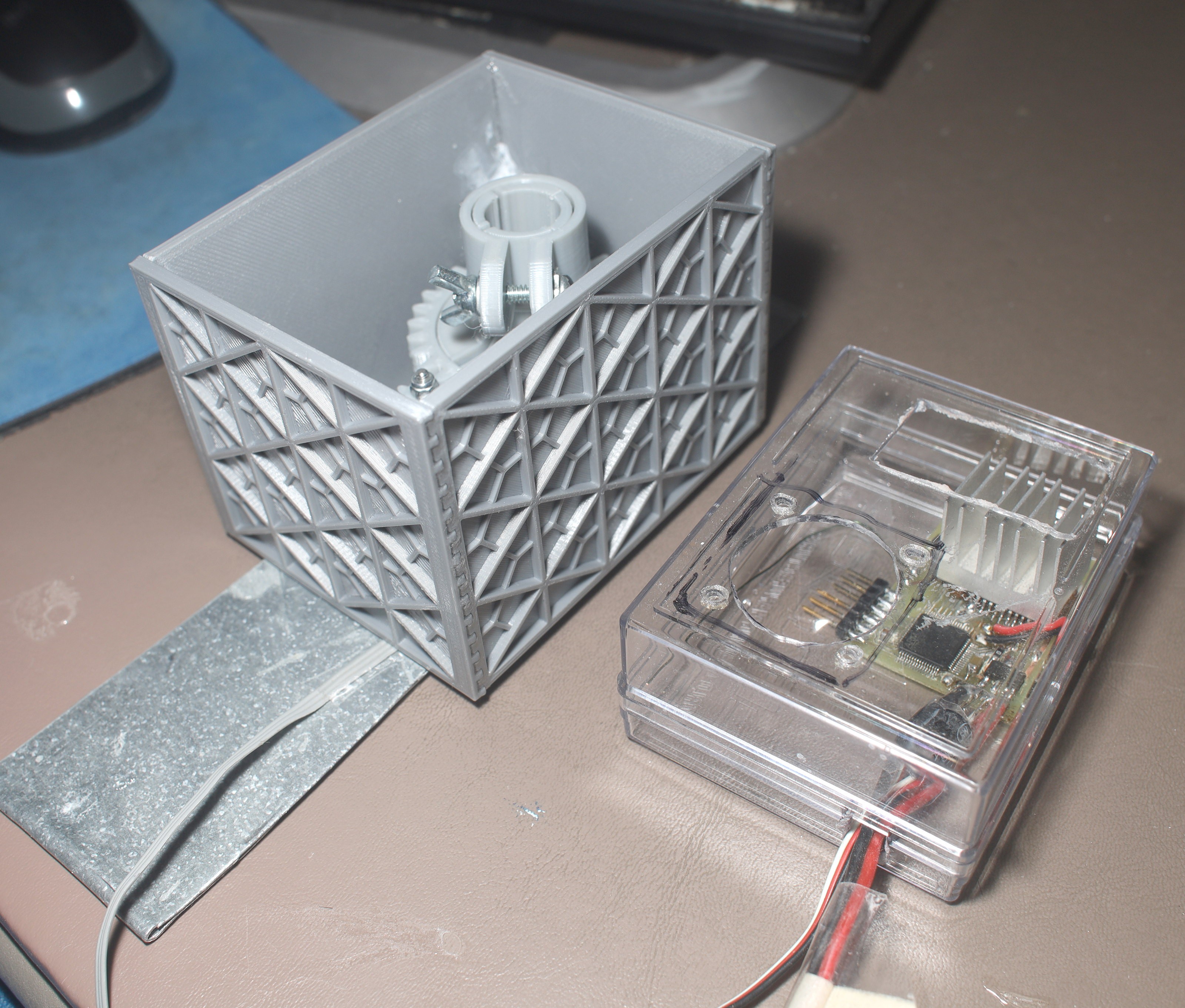
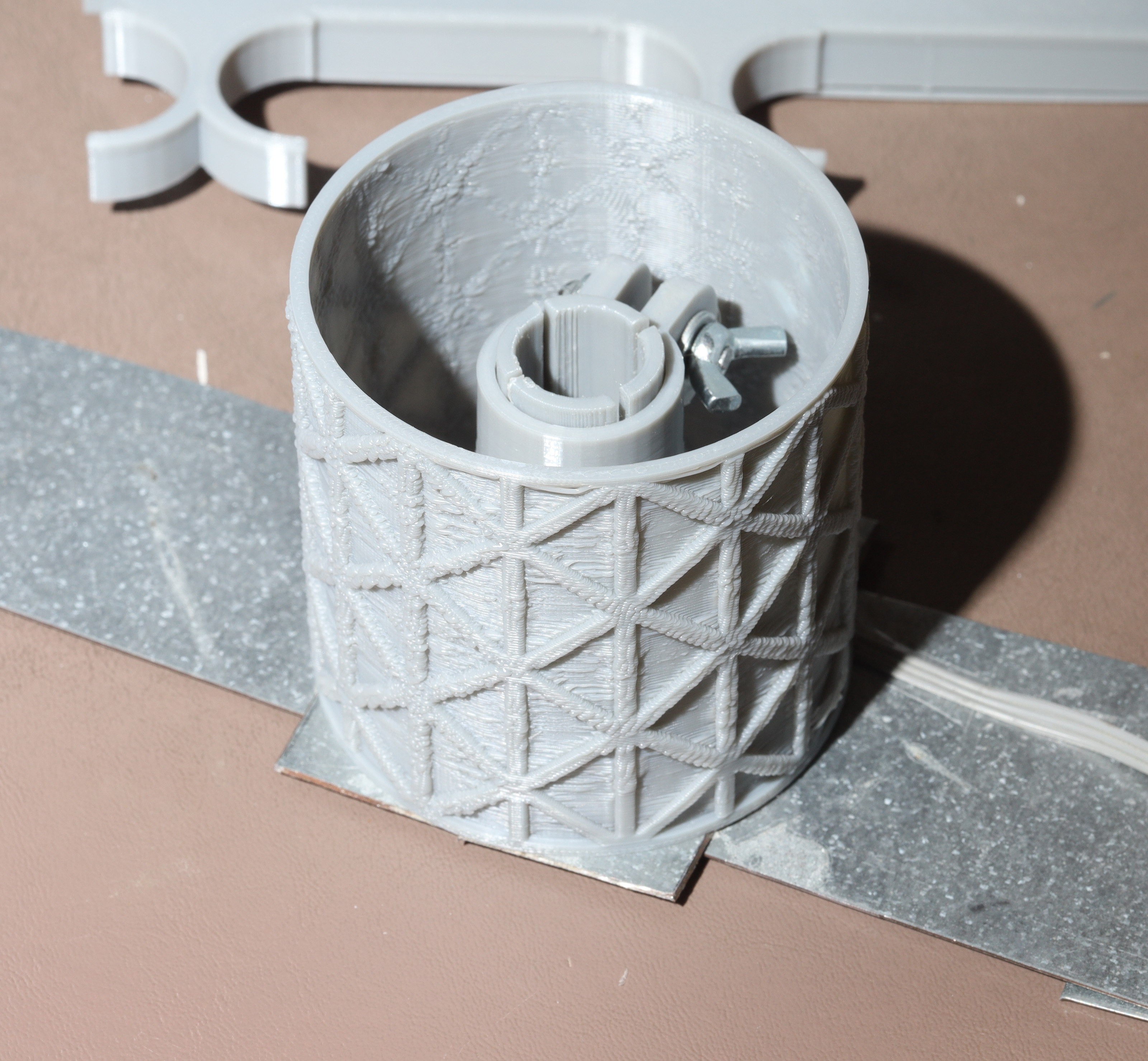
This was a horrid enclosure, but it just needs to keep clothing out of the gears. It was manely a study in isogrids. Isogrids are the key to future plans. Didn't think a lion would ever be able to replicate the crew dragon isogrid pattern. Didn't even realize it was just an isogrid until starting to model isogrids. Thought it either came from aliens or it was an example of humans evolving into their science fiction notion of aliens.
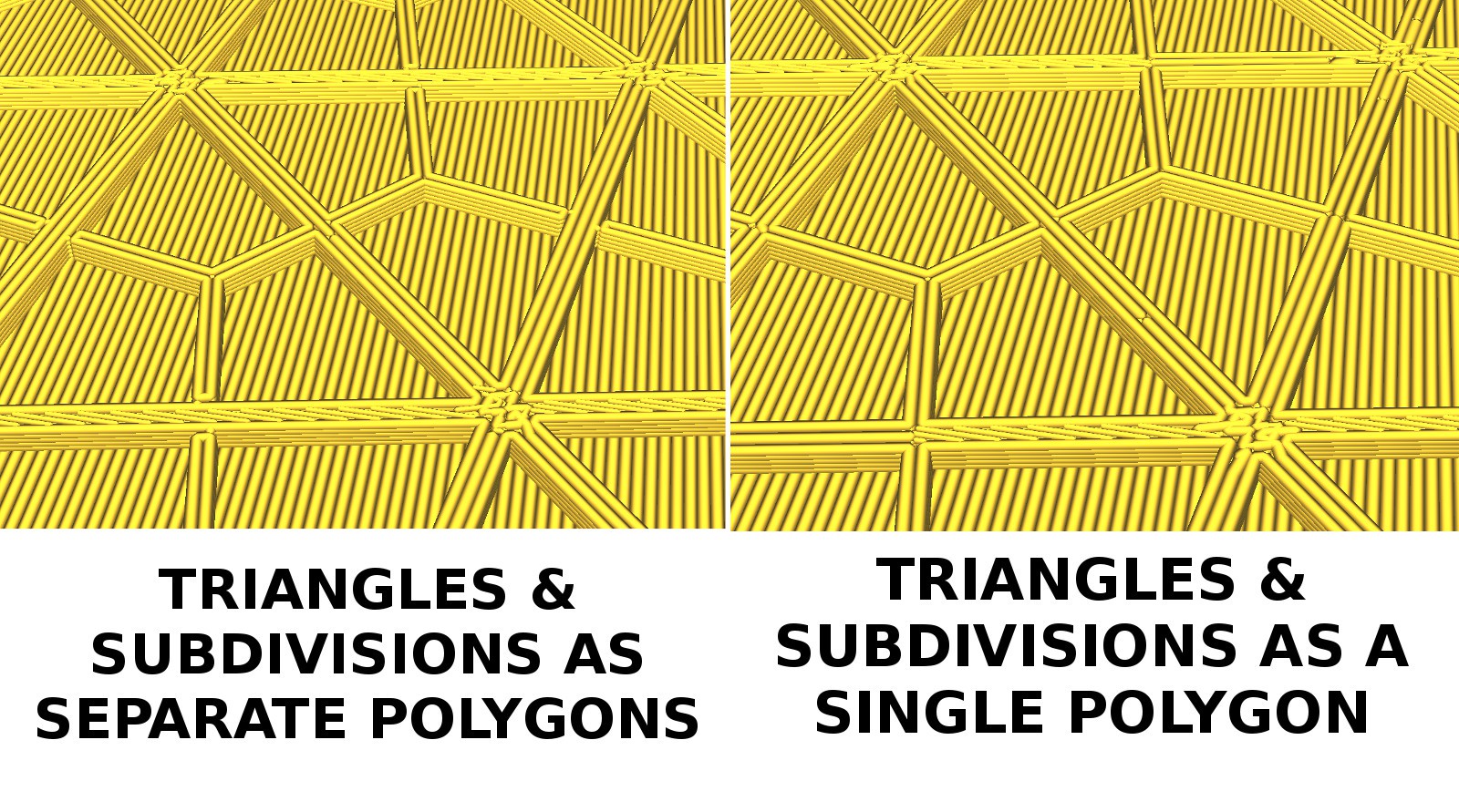
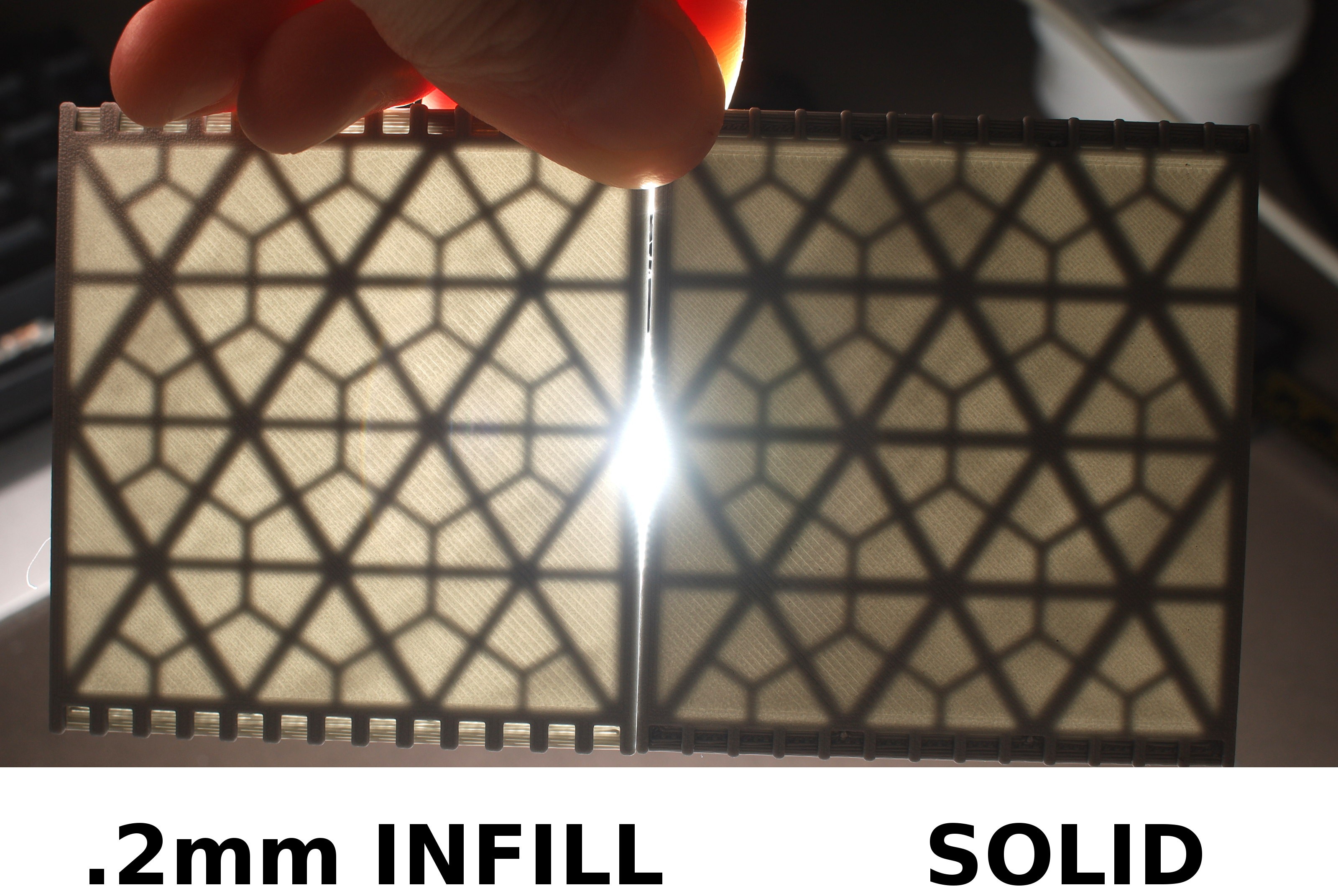
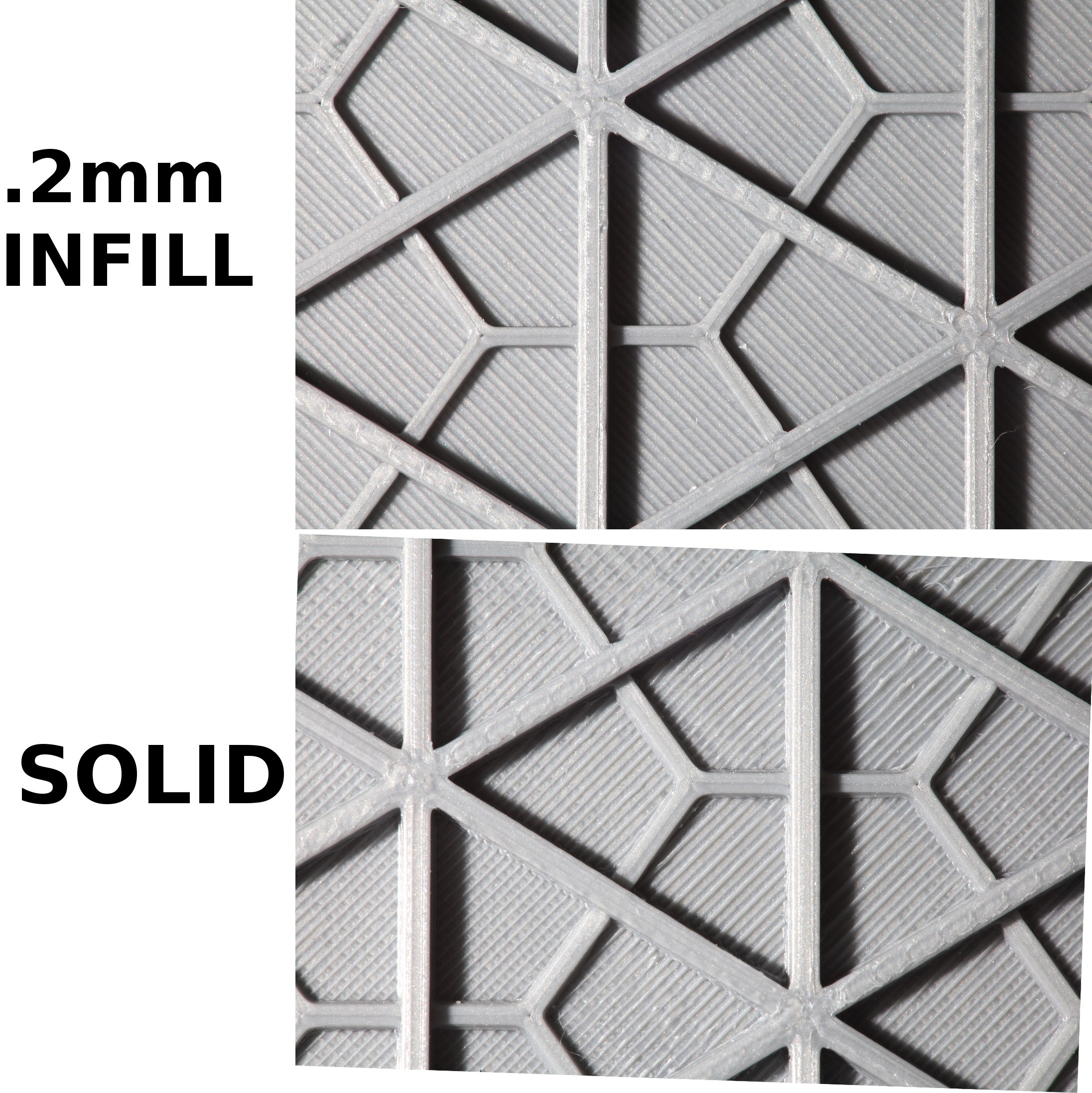
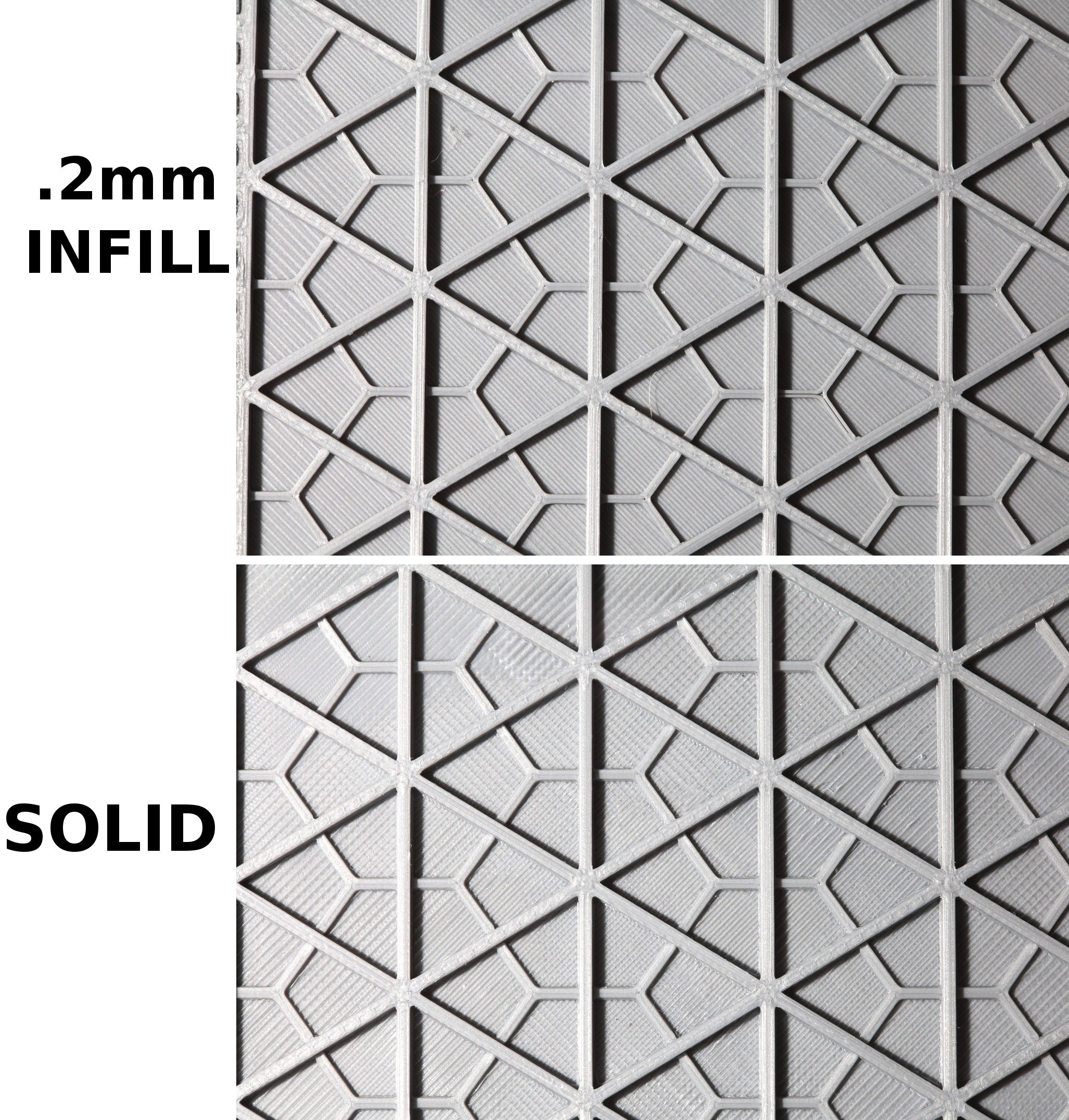
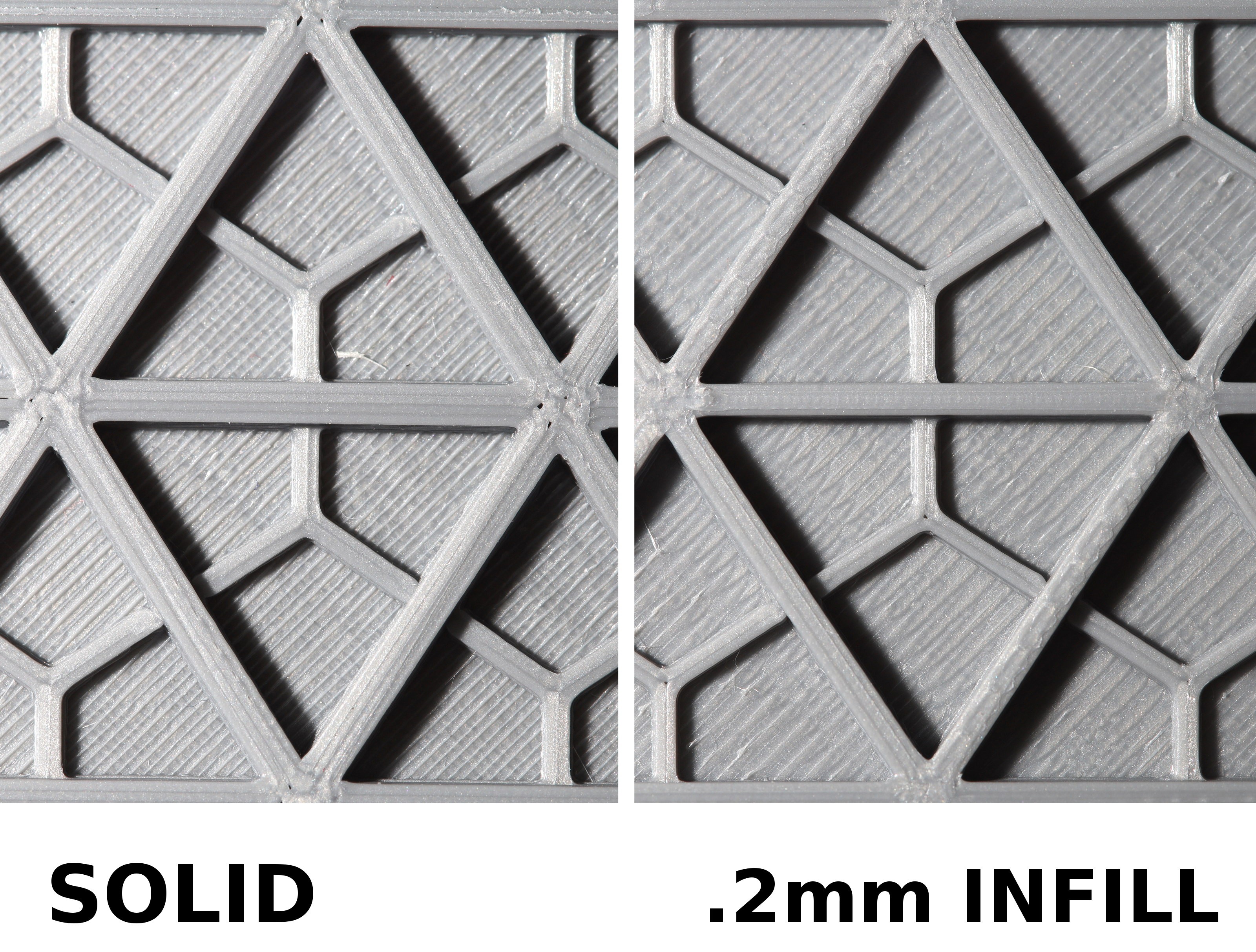
There is an amazing amount of engineering involved in printing strong isogrids. Isogrids really do have structural value in the small scale plastic world. They must be modeled as a single polygon to get the line segments joined with a contiguous filament. It took a long time to discover the reason top surfaces are rough is because of a lack of a gap between the top & bottom surfaces. .4mm of infill is ideal. A 1mm piece with .2mm of infill is stronger than a solid 1mm piece because the isogrid has a flatter bond & because more material is devoted to the structure instead of ridge artifacts.
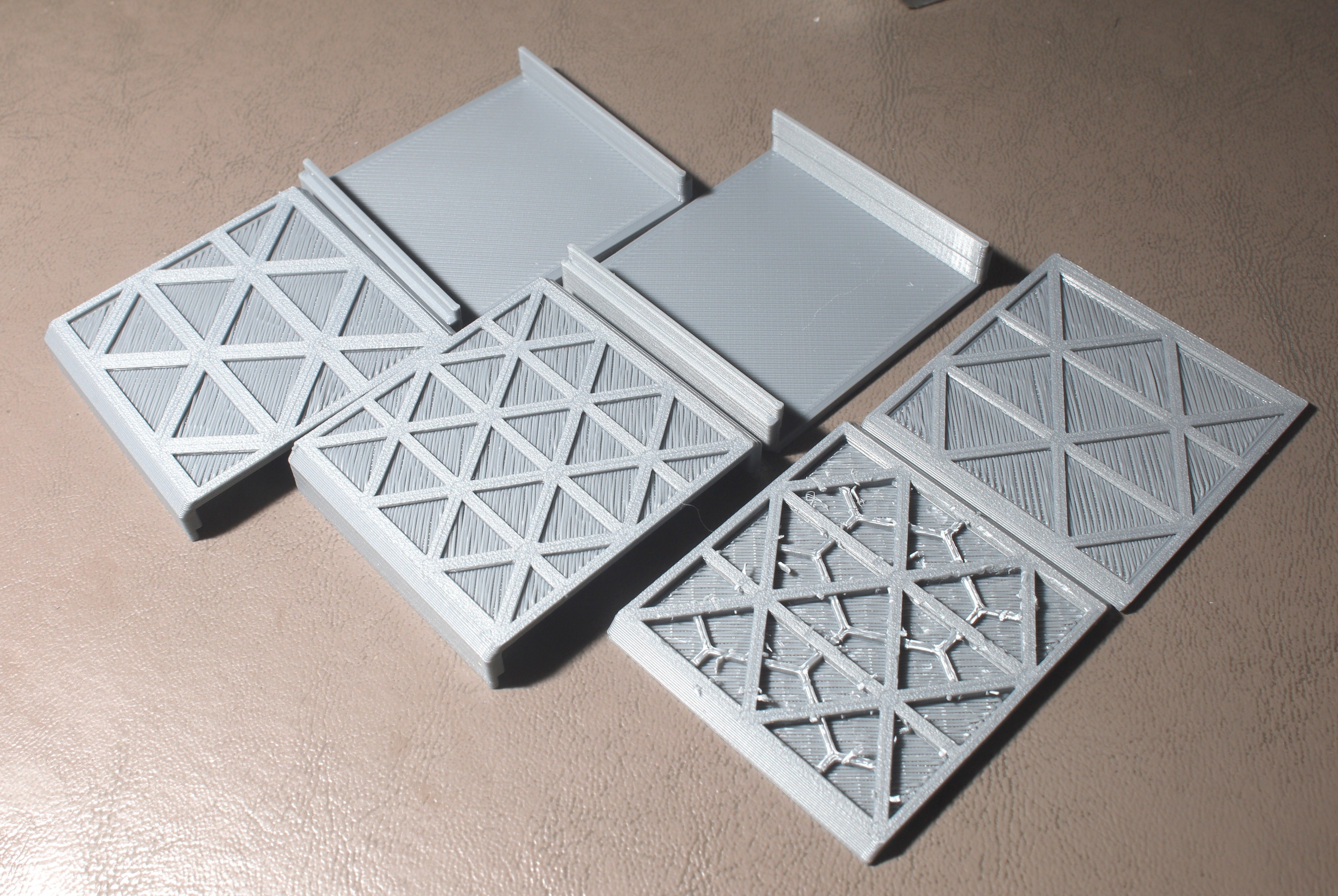
More isogrid test pieces. They can be printed facing the bed without support or infill. There's enough give to get flat tops. Helas, the subdivided isogrid would require support. The lion kingdom would also consider modeling custom supports for the subdivisions. A .6mm subdivision layer & 1.2mm triangle layer with custom supports might work, but require a lot of work to either melt or snip off the supports.

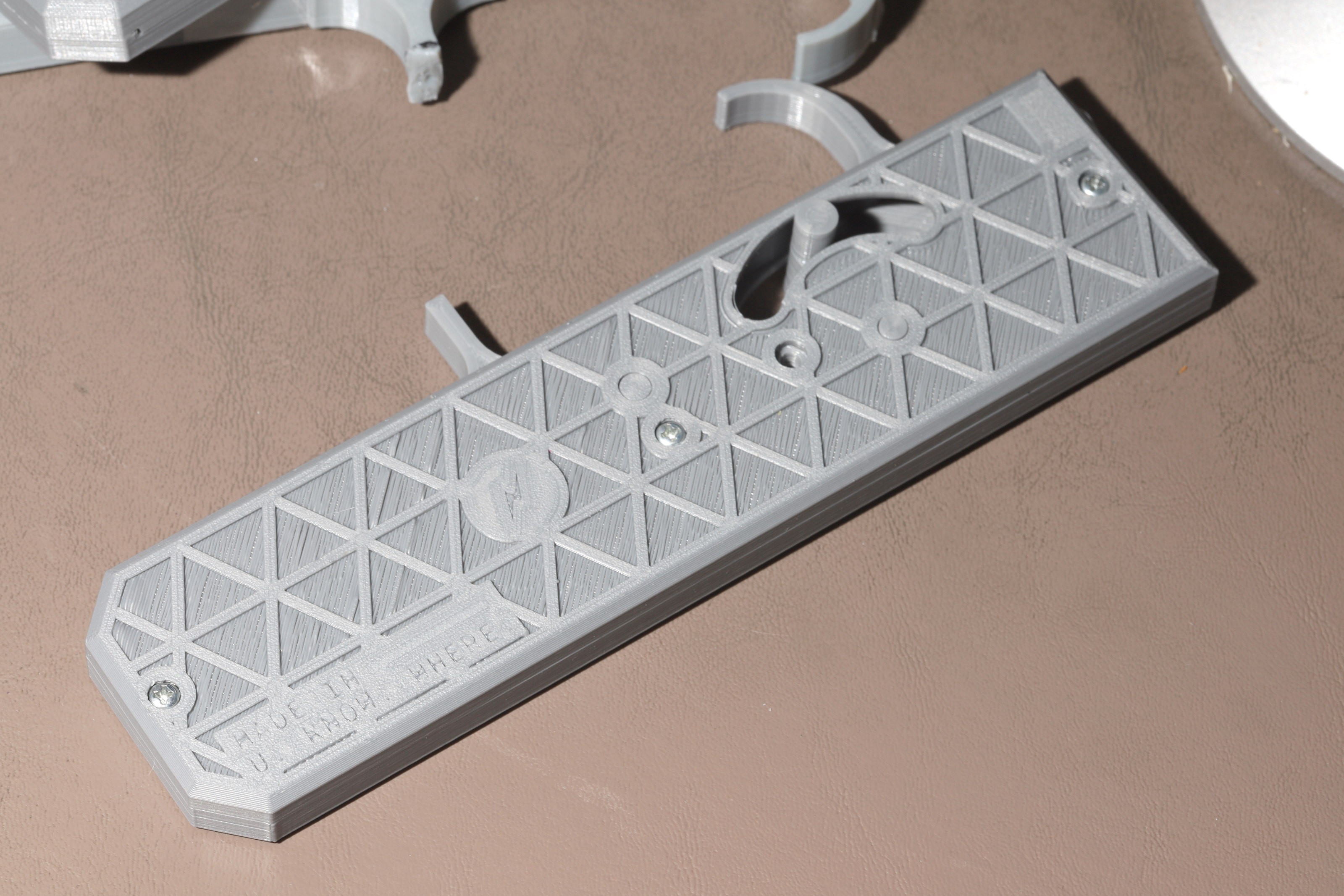
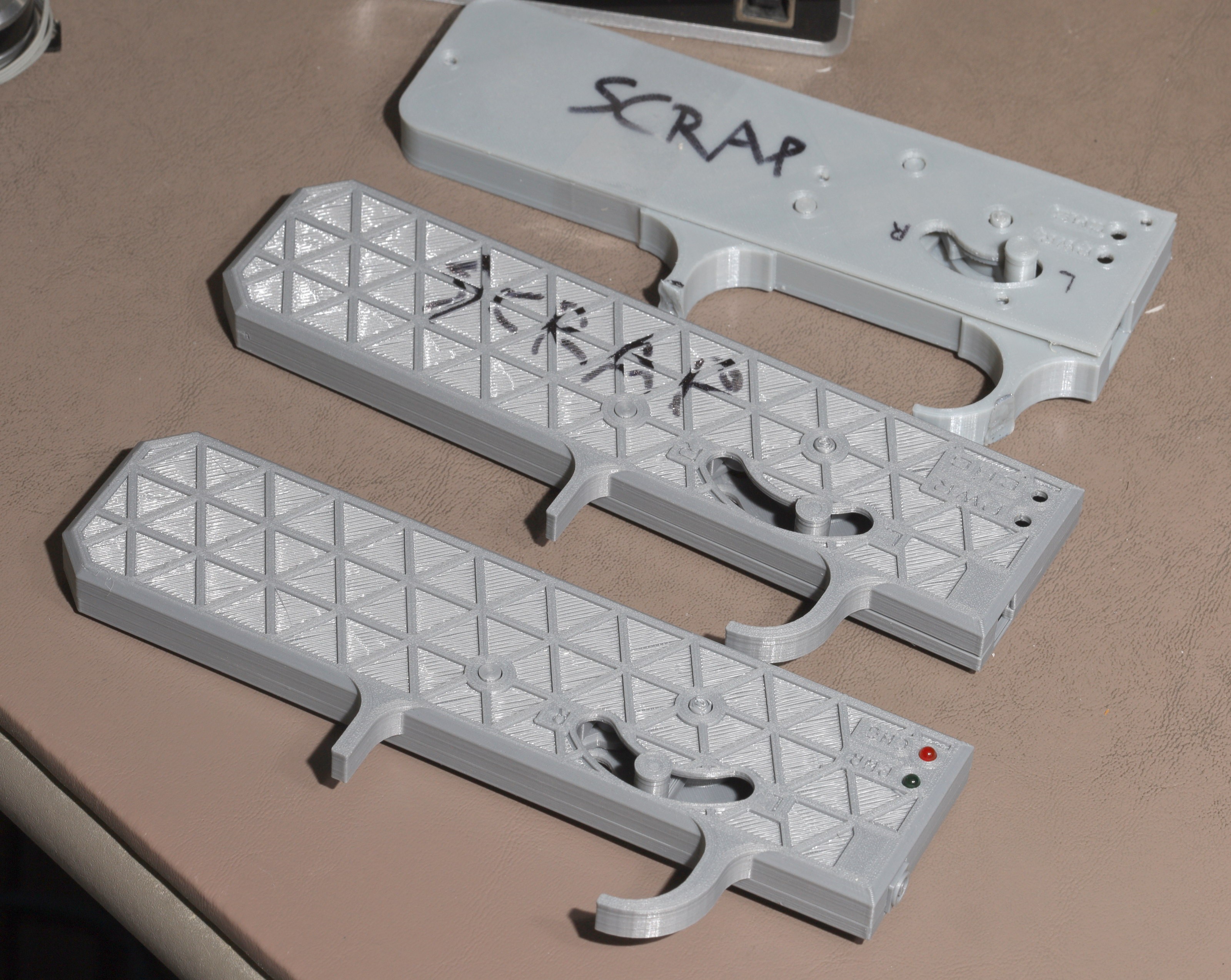
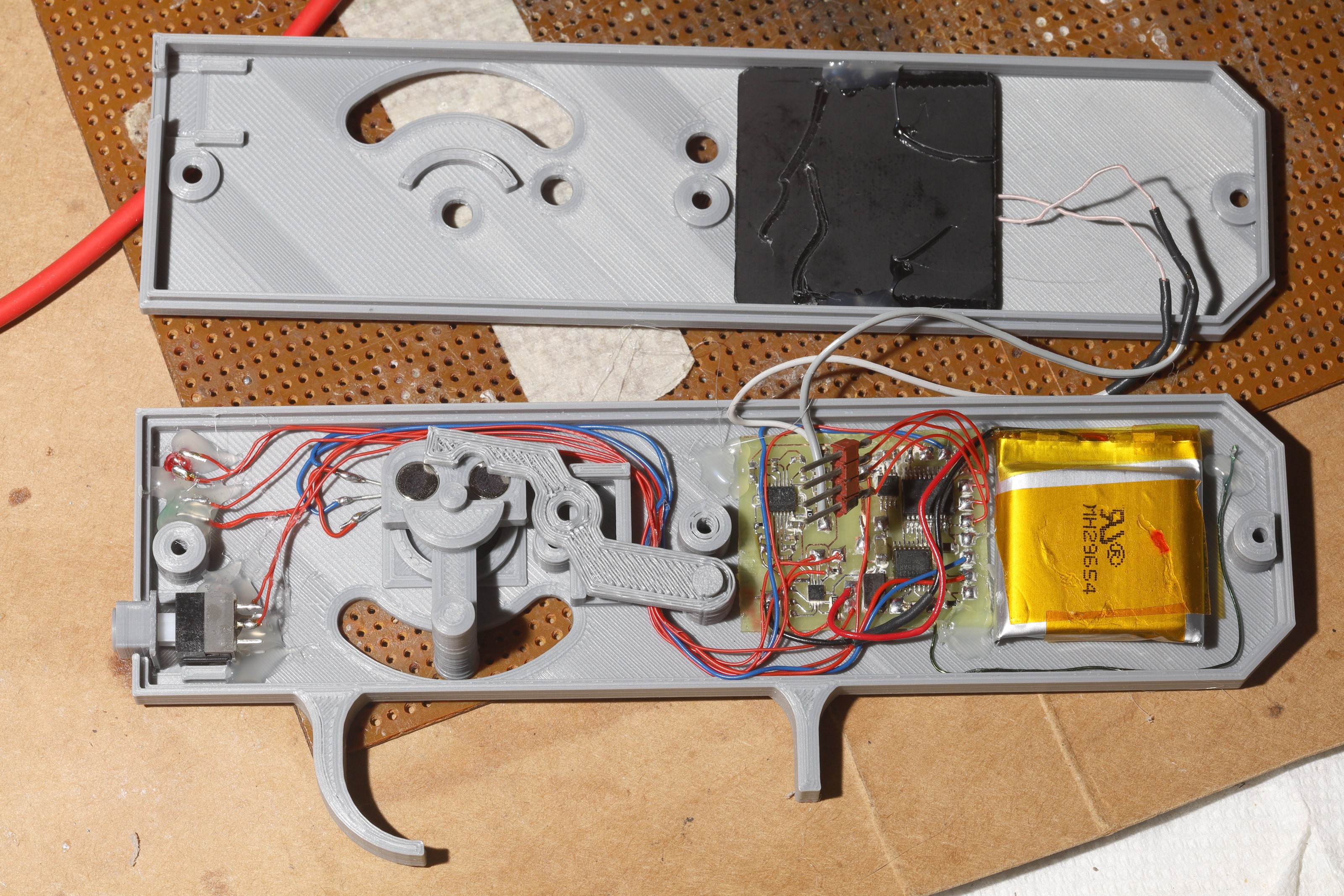
The final paw controller ended up with an isogrid exterior, clamshell, countersunk screws, temporary screw for retaining the spring, larger joystick. It was frustratingly large compared to the boosted board. There were always a few things to improve, but it was beyond the point of diminishing returns.

The final gears got a 4.5:1 reduction. The mane problem with the motor board is random firmware crashes, seemingly because of power glitches. The workaround has just been a watchdog timer.

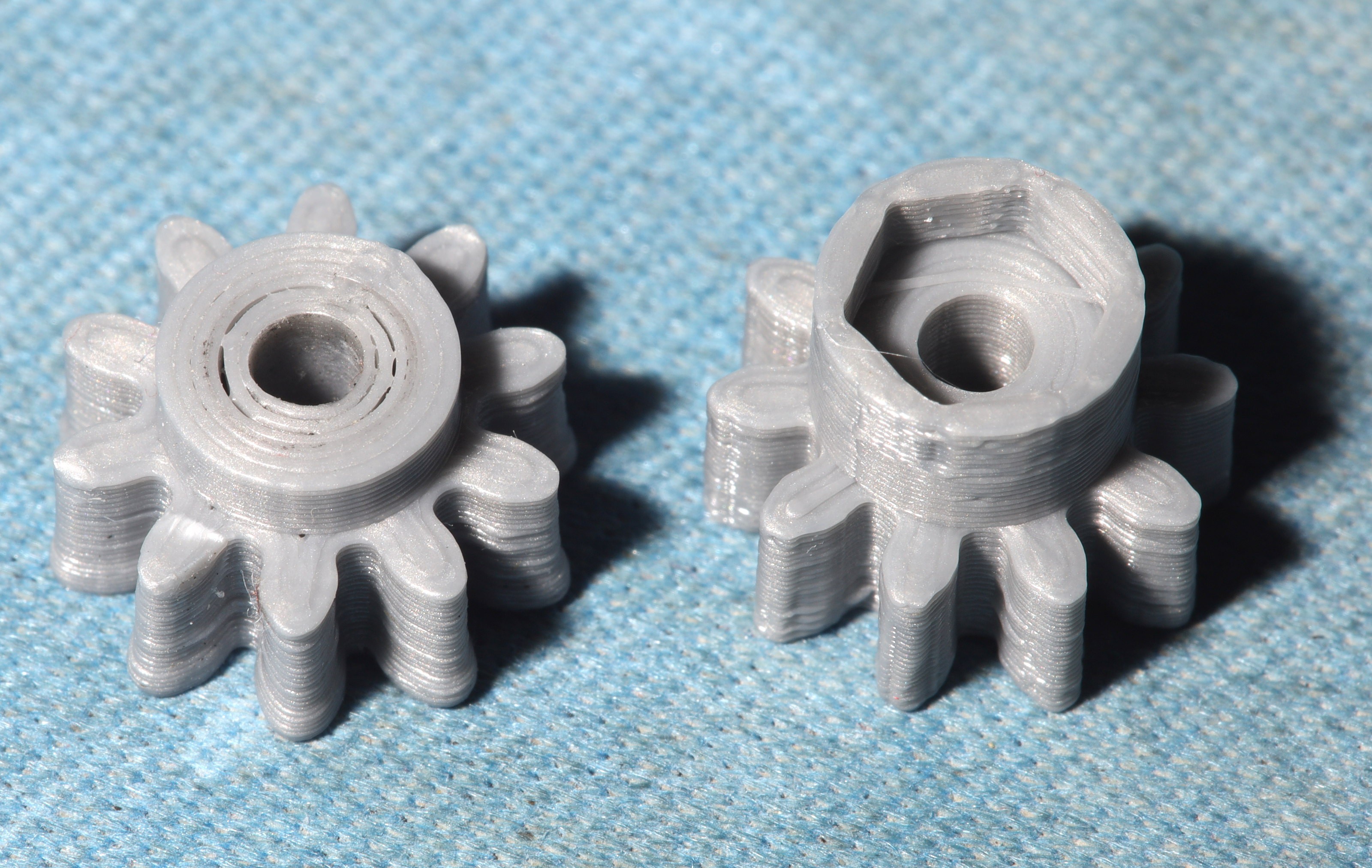
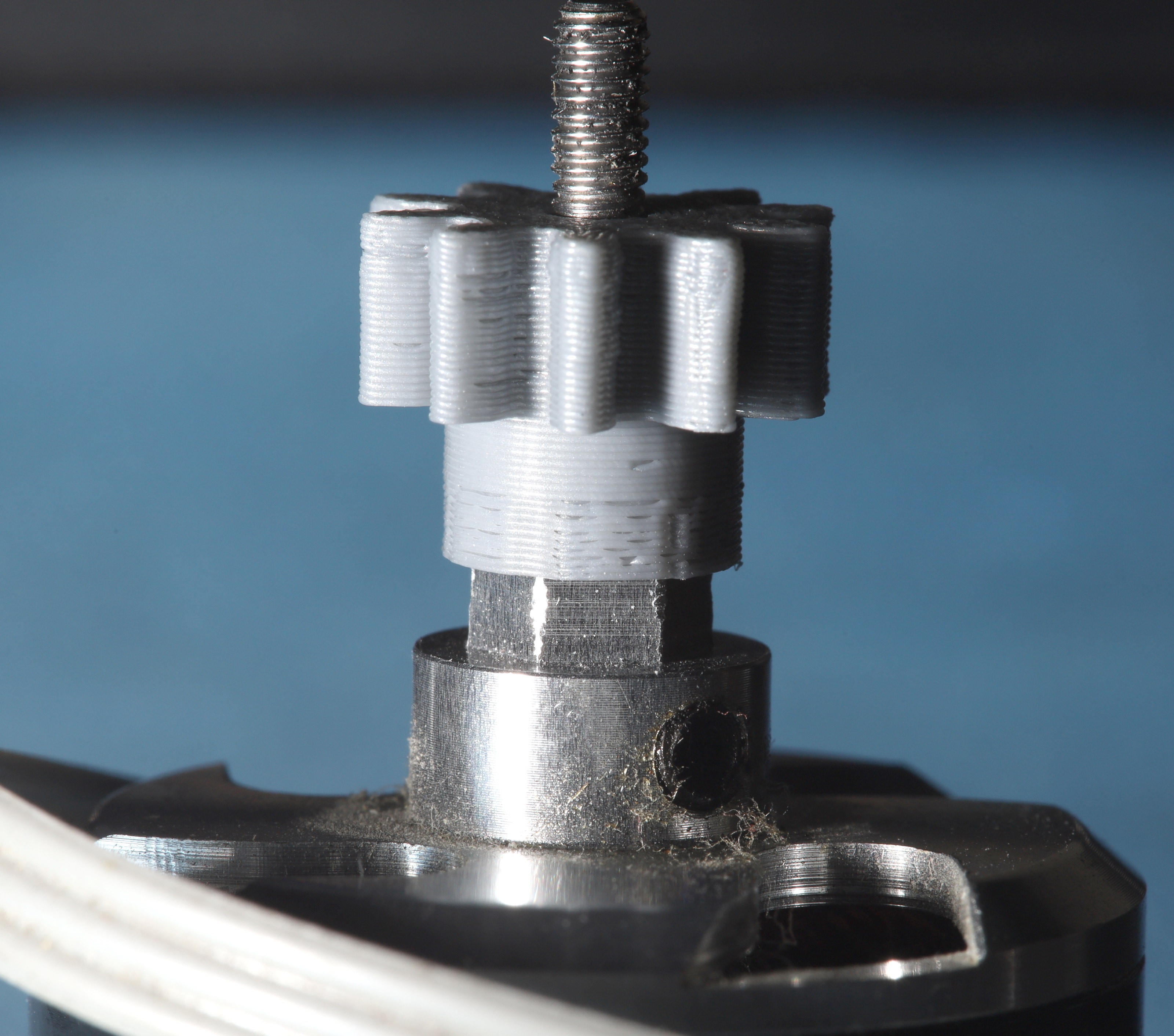
Pinion gears continued to be problematic. .26mm line width gave better results. This one got a nut cutout to lock into the motor.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.