 lion mclionhead
lion mclionheadThe next motor was a
SODIAL(R) High Efficiency 540 17.5T 2200KV Sensored Brushless Motor for 1/10 RC Car Truck
https://www.amazon.com/gp/product/B075LFGCK9/ref=ppx_yo_dt_b_asin_title_o00_s00?ie=UTF8&psc=1
After arriving 4 weeks later, this one finally fit.

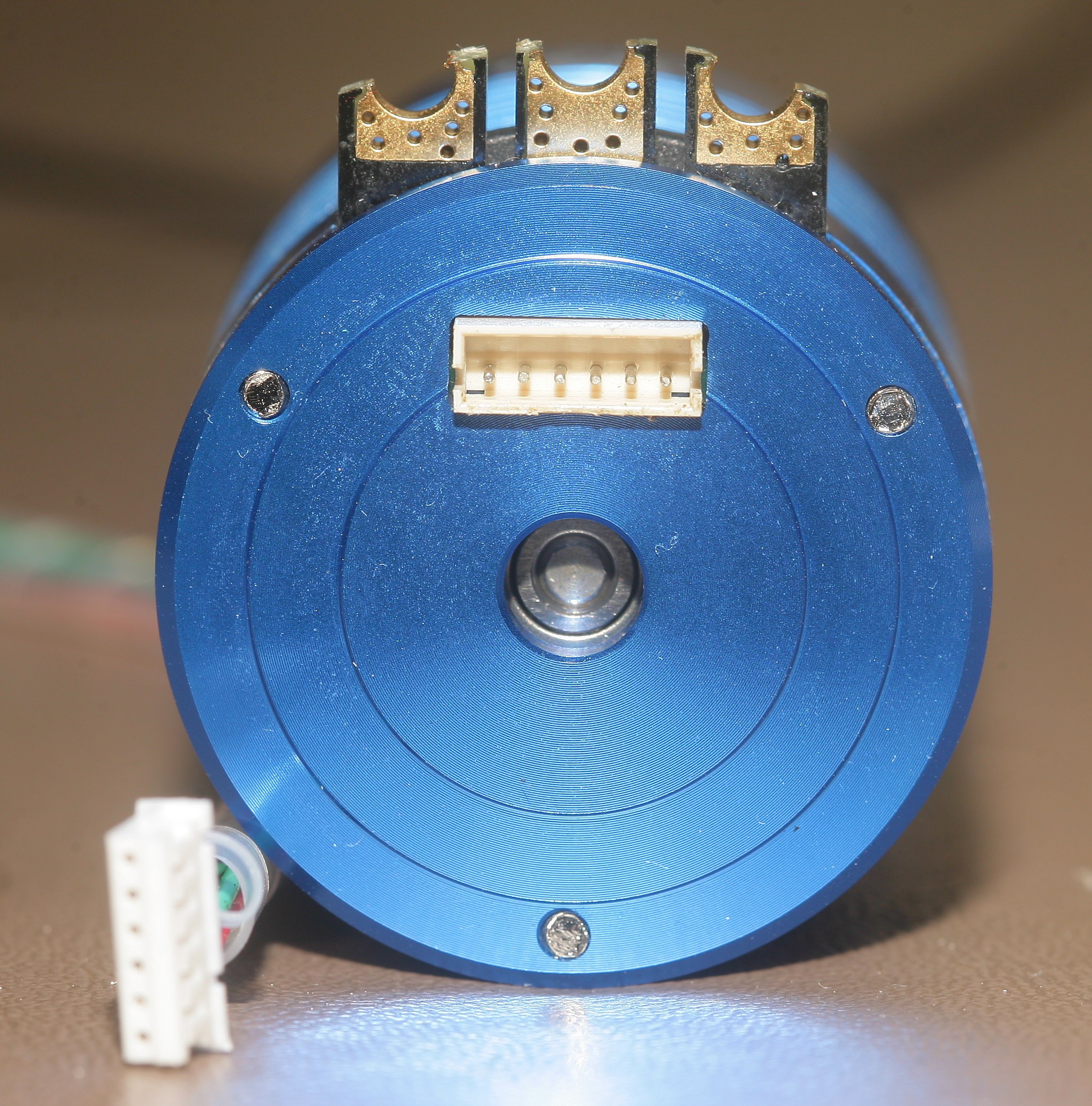

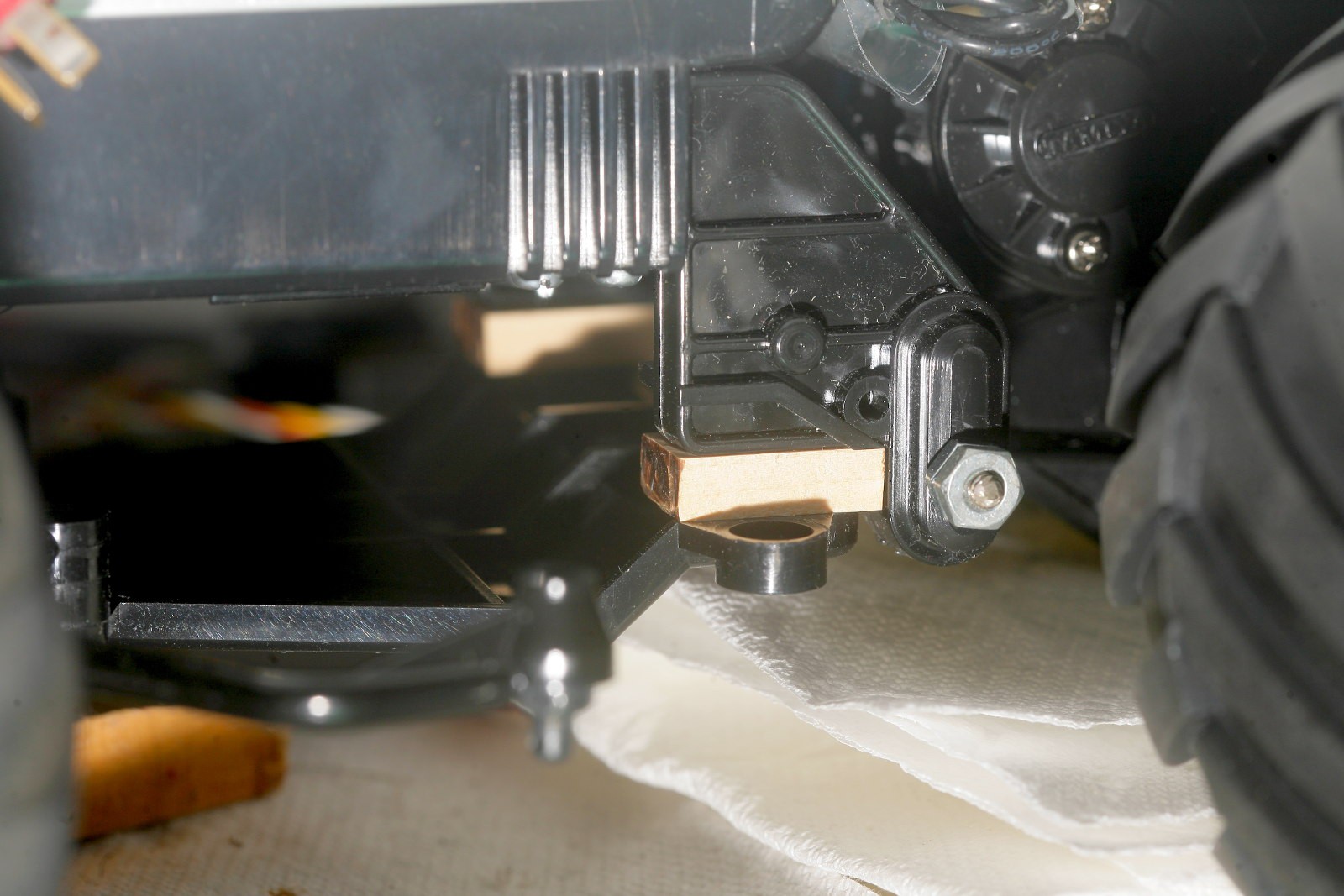
Most intriguing was the hall effect sensor connector. It could allow speed control while coasting. Sensorless motors just go out of control while coasting. It would require depotting the ESC, routing 3 more wires from the ESC to the motor.
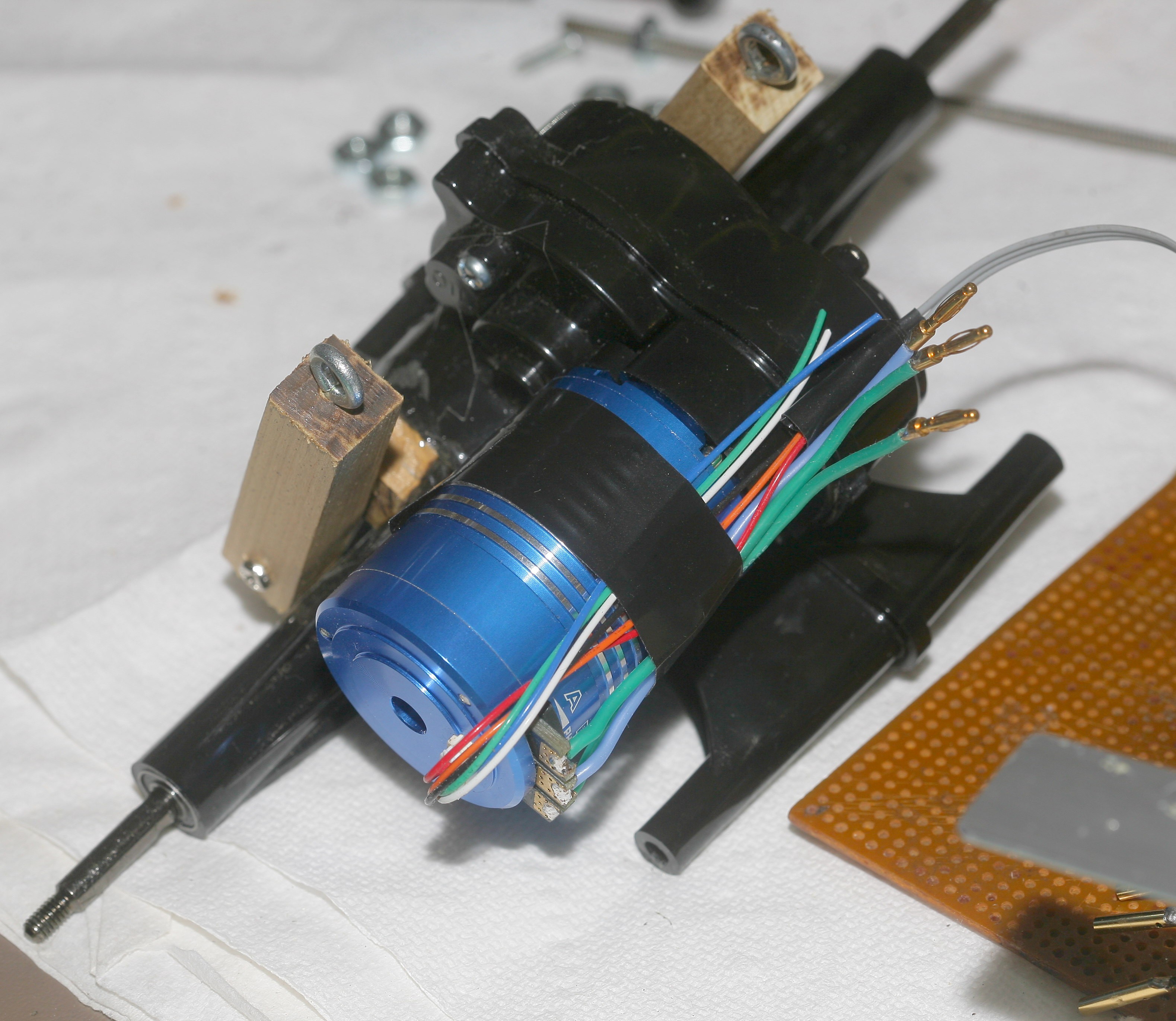
Takes a lot more wires to access the hall effect sensor.

A 1.7k was put in series with the hall effect output to lower it to 3.3V. The 5V was extracted from the ESC. Sadly, the hall effect sensors proved very fragile. Just connecting 5V or GND to the signal line fried one. The motor was down to 2.

Some past telemetry was restored for viewing radio packet rates, throttle PWM, & RPM. For the 1st time, the app would record PWM to a file.
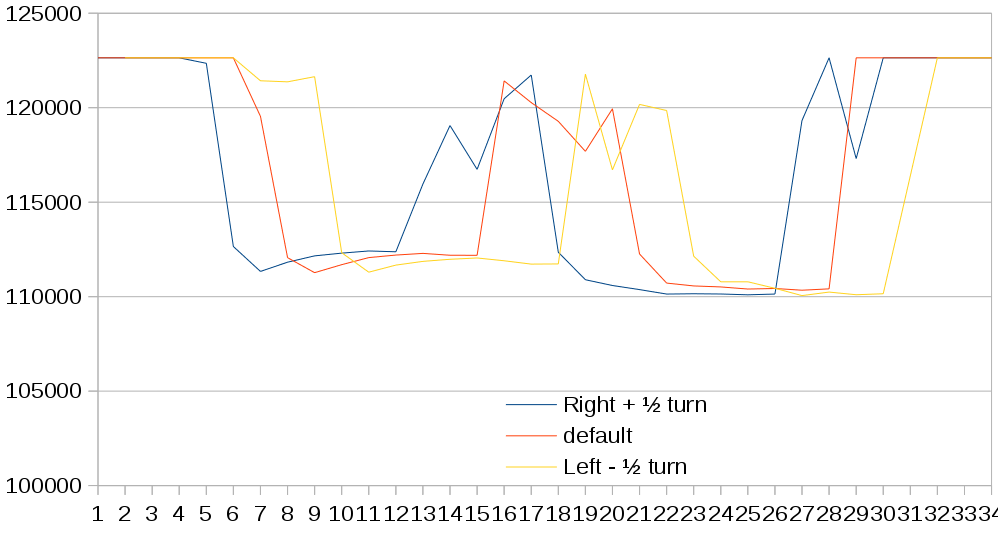
This revealed the slight throttle changes from changing the wheel alignment. The lower the PWM, the higher the power. The changes were also caused by the battery draining, but there was hope the battery drain changed it less than the alignment. The current alignment was copied with caliper measurements. More precise wheel alignment would still require many long drives.

High quality, weatherproof, color coded LED connectors. The frame is 7V, but the lion kingdom figured it wouldn't matter.
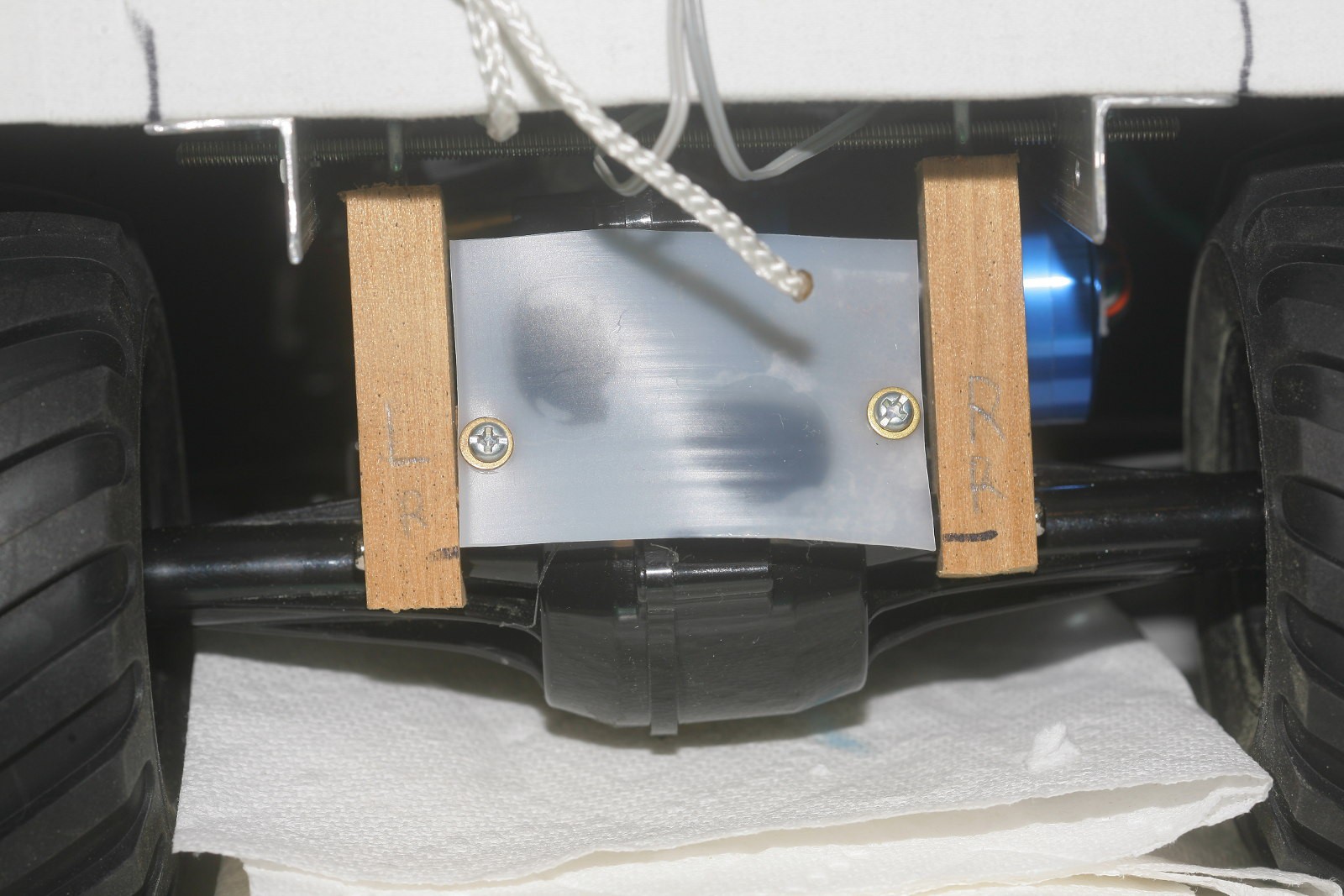
Oil cover installed & transmission lubricated. Struts are still not threadlocked, but it only needs 1 to finish a drive.
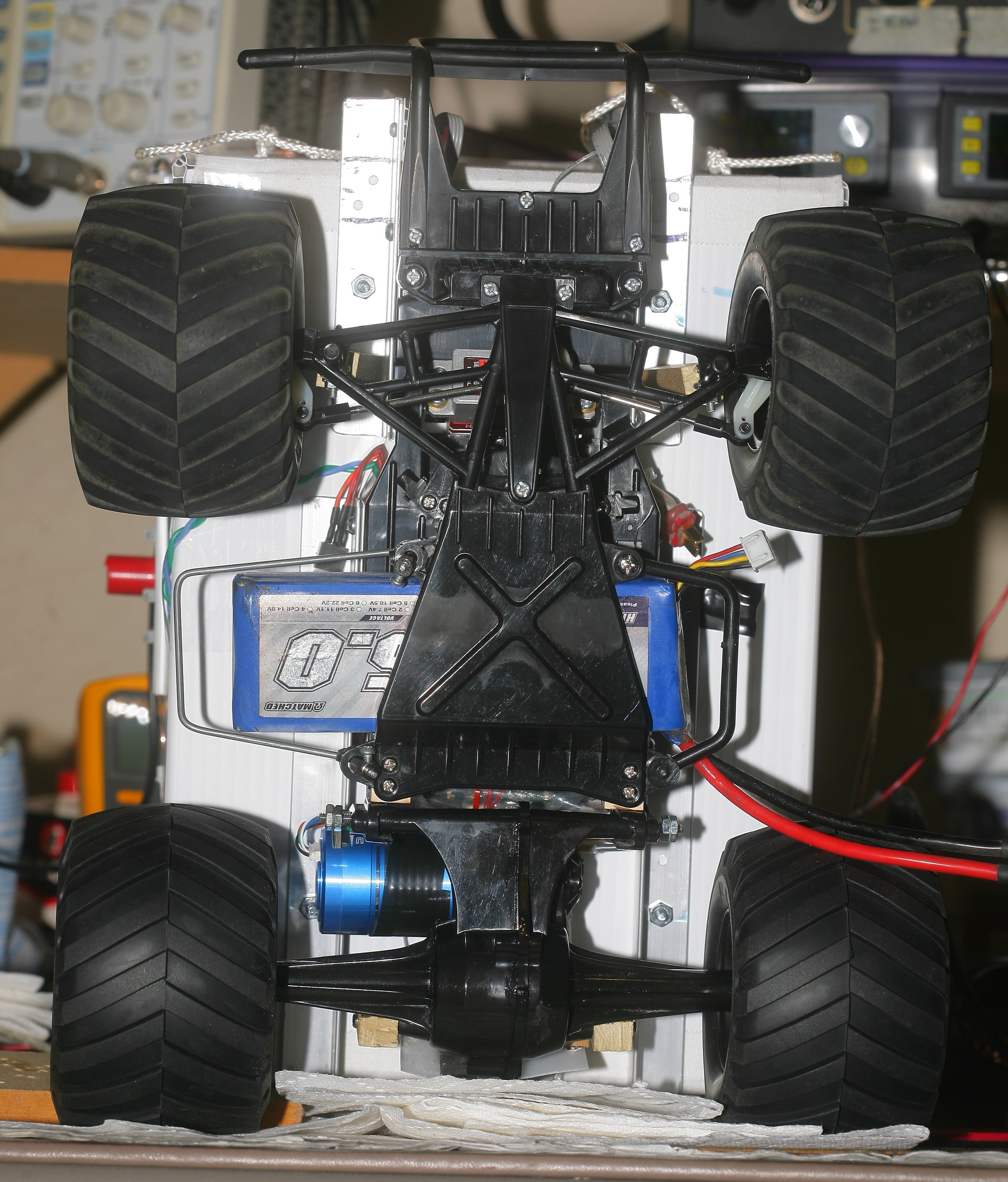
Old rear tires were installed as front tires to wear them down before installing nylon wrappers.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.