 lion mclionhead
lion mclionhead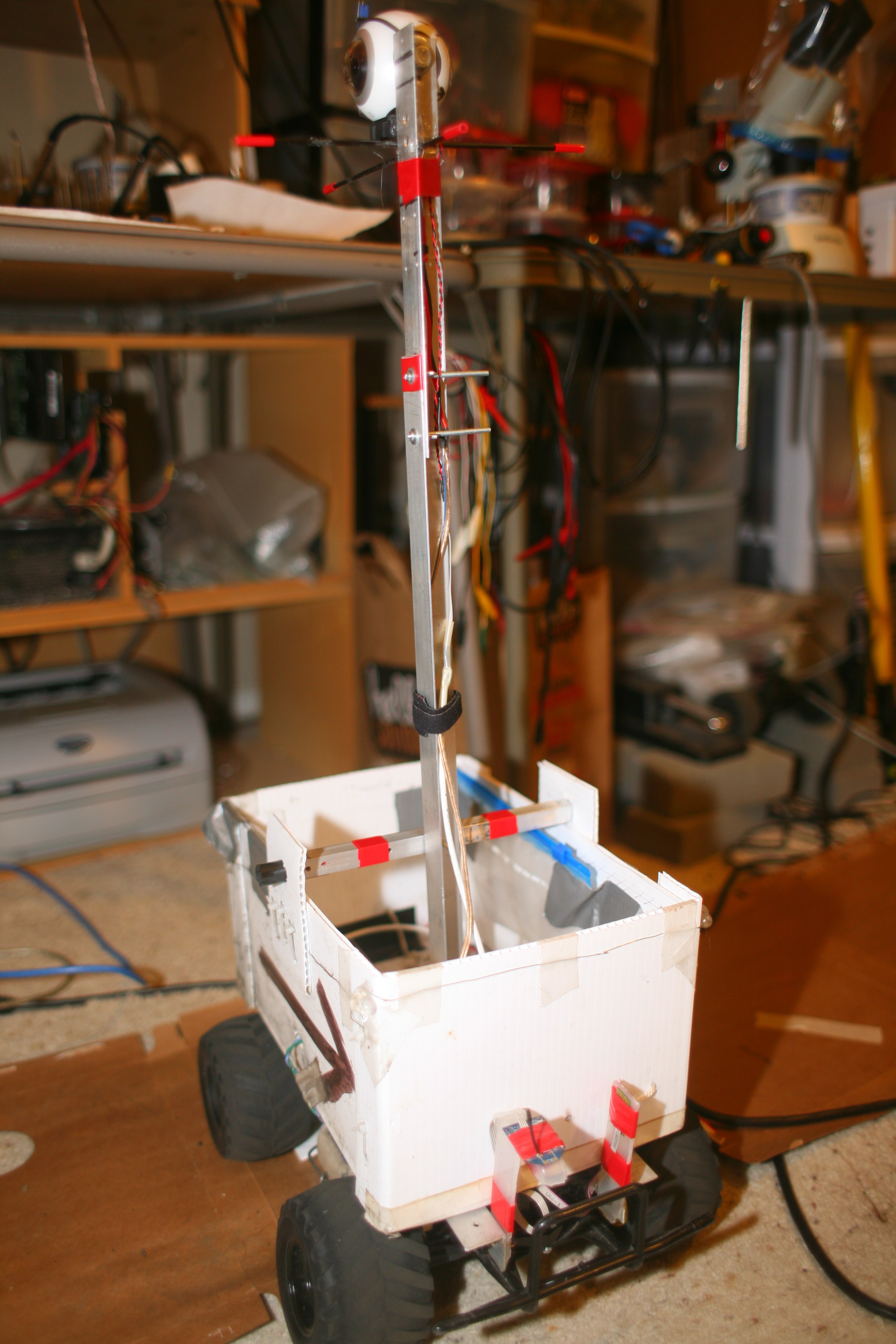
Attached the sphere cam to simulate the worst case oscillation. It's beyond what any commercial heading hold vehicle has to contend with. The traditional method is adding ballast & using a large enough vehicle to keep it from oscillating. Doing it with software will never make it as stable as the traditional method, but buys portability.
The lowpass P + highpass D filter was a total failure. It simultaneously oscillated while being too delayed in tracking the heading. The allpass P + highpass D filter was promising, but more erratic. D needed a 1000x gain & P needed a 200x gain, which made the lion kingdom wonder if P was doing anything at all, but D had no DC offset without P.
Suspect another term which highpasses the angular rate would improve it.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.