 TaylorHawkes
TaylorHawkesThe 3 Flight Control Systems
I breakdown the flight controls into 3 distinct systems: onboard, autonomous, and human. I think about it like this: the onboard system will keep the vehicle in the air for seconds, the autonomous system will keep the vehicle in air for minutes and the human system will keep the vehicle in the air indefinitely and define useful tasks for the vehicle to do. Each system needs to communicate with the one above and below it.
Onboard System: This system does the bulk of the work. This will be the system that keeps the evtol in stable flight, it (currently) runs on arduino (but this may have to change). It includes the gyroscope/accelerometer and altimeter to maintain stability and position. It also includes all the flight hardware including frame, props, wings, battery etc...
Speed: 250hz
Communication: SPI, 12C,
Autonomous System: This system will run on a raspberry pi and will assist with human flight control system. Current plan is on using stereo vision with two logitech usb camera’s and a raspberry pi to handle the computations. (I’m writing this software myself, may use opencv to help with some image stuff. First iteration of flight system will simply map out surface points, and have evtol avoid hitting any surface.
Speed: 30hz
Communication: 4g Cellular, USB, SPI,
Human system: This is basically an iphone app and will provide the user with an interface to control high level flight controls of the system. Such as entering a lat,lng destination.
Speed: 2hz
Communication: 4g Cellular



 Tom
Tom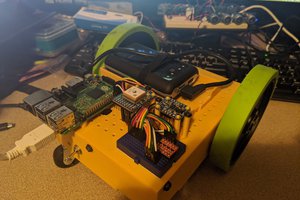
 Derrick
Derrick
 Juan Sandubete
Juan Sandubete
 Ray Patel
Ray Patel
While making an autonomous drone with payload capacity is an awesome project idea I am wary of your use of a live payload. I’m not sure what country you plan to operate in but the AMA forbids the use of live animals in any model aircraft.
You might consider creating some type of crash test piggy with sensors and logging capability. This way you can accurately gauge crash survivability without killing and maiming so many live animals. I would think the results would be more accurate and much more pleasant to collect.