 OpenBionics
OpenBionicsIntroduction
We present the development of a breakout board for controlling our prosthetic hand. It is a PCB (printed circuit board) with pin headers to accomodate two different servo motors (standard servo and herkulex). It can have both analog inputs (e.g., EMG signals) and digital inputs (e.g., buttons for RobotHandExtension). An I2C bus can also be used in order to connect sensors like the takktile or other servos such as the openservo. The breakout board has also external pins for development.
The main microcontroller we currently use is an Arduino Micro Pro, equipped with an ATmega32U4 core. The PCB can be powered by an external power supply or a battery.
The board is currently under testing. Pictures of the board and its development process can be found below.
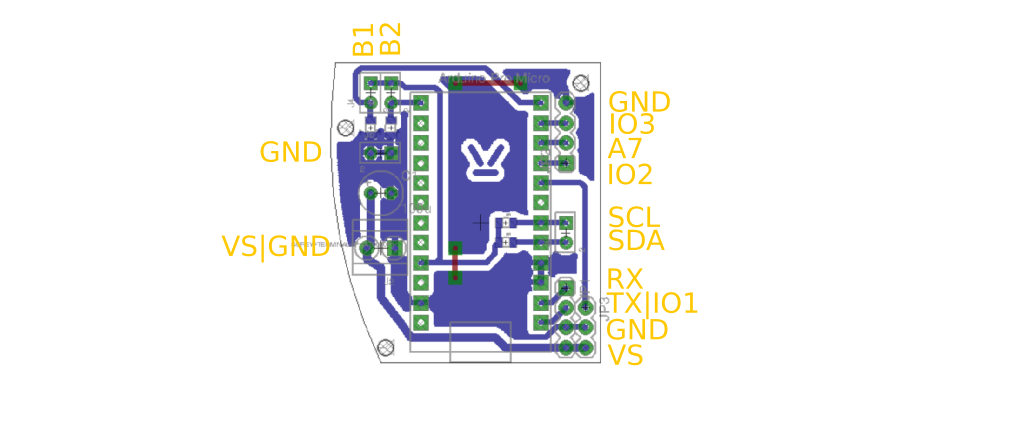
Pinout
The Pin Mapping of the breakout board.
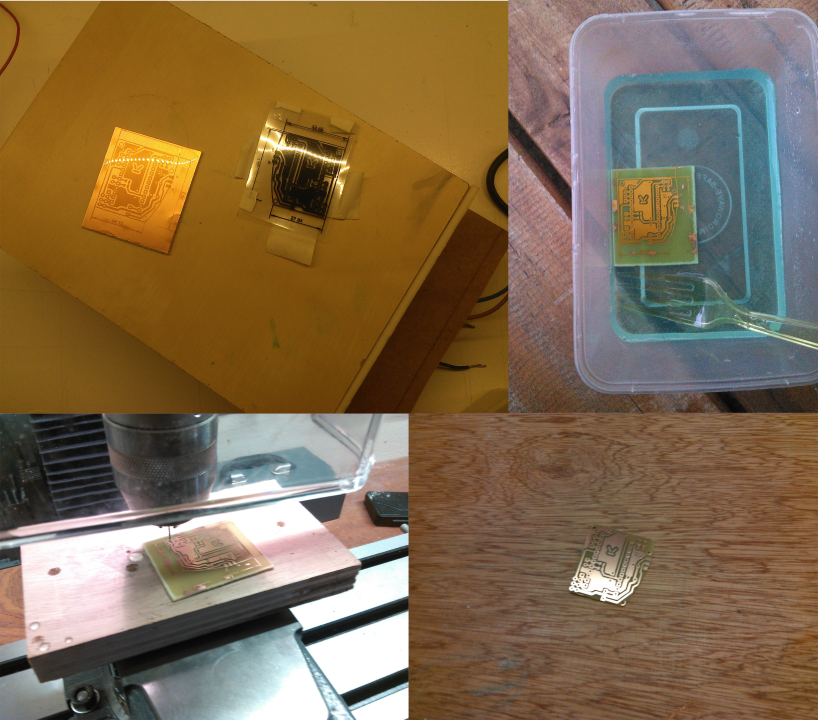
Board Development
The development of the breakout board was done using the facilities of the Athens Hackerspace (Thanks!!!). Some photos of the development process and the final result.

The OpenBionics Electronics Library can be found here.
Arduino Firmware
In order to evaluate the capabilities of our prosthetic hand, we developed a simple firmware for Arduino using this library for Herkulex DRS-0201.
We modified the library in order to control the motor with an Arduino Micro Pro.
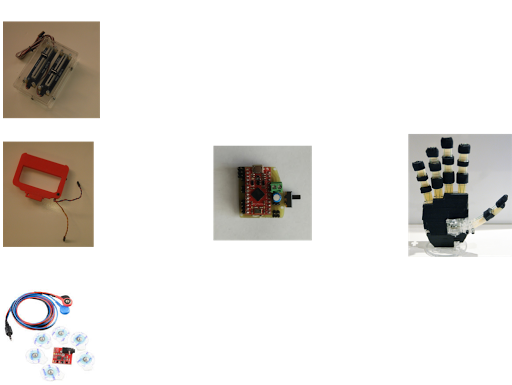
Next Steps
We plan on controlling our prosthetic hands with different interfaces, such as these or EMG sensors.
A schematic depicting the high-level control architecture of our prosthetic hands can be found below.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.