 Blecky
BleckyThe SubPos Wi-Fi Positioning System is an indoor positioning system that can be used in various environments such as metro lines, shopping malls, carparks, art galleries or even conference centers; essentially anywhere GPS doesn't penetrate. It could also be integrated into an array of IoT enabled devices, from access points to Wi-Fi enabled light-bulbs.
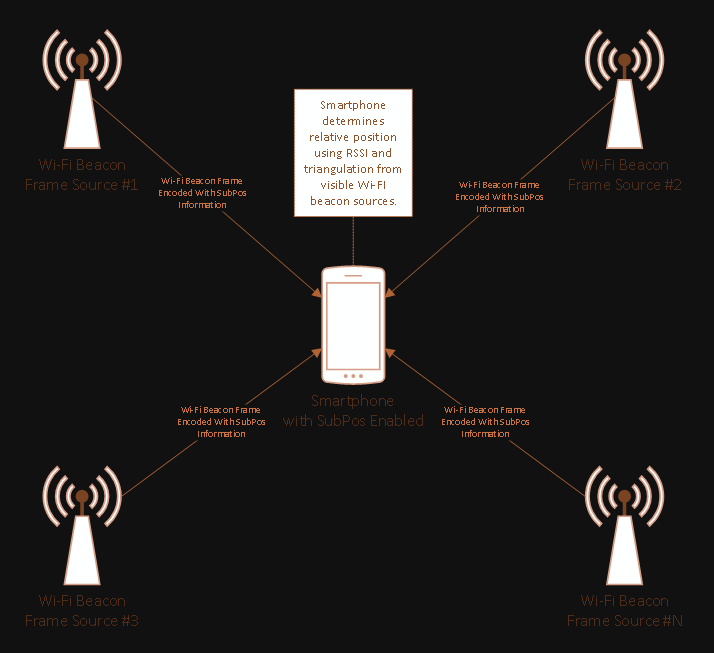
The Standard defines an accurate method for subterraneous positioning in different environments by exploiting all the capabilities of Wi-Fi. SubPos Nodes or existing Wi-Fi access points are used to transmit encoded information in a standard Wi-Fi beacon frame which is then used for position trilateration. The Nodes, while not necessary part of the SubPos standard, provide a pre-calibrated device that is easy to configure and can be dotted about with ease.
The SubPos Standard has been designed for backwards compatibility with existing access points and client devices in mind. It works with most existing access points and almost any Wi-Fi enabled client device (smartphone, laptop). For those wishing to use SubPos on an access point that isn't supported, the SubPos Node provides a great alternative with enhanced functionality.

When a user enters an area littered with one or more SubPos Nodes, they are able to determine their position with a simple smartphone application. Some smartphone applications could include helping users find their parking spot, navigating unfamiliar buildings or determining whether your metro station is soon approaching. It could even be used as a GPS relay for embedded systems.
Unlike traditional Wi-Fi location techniques, which map out an area of Wi-Fi signal strengths while storing it in a database, SubPos Nodes operate much like GPS satellites. In this case however, instead of using precise timing (for time of flight) to calculate distance between a transmitter and receiver (GPS), SubPos uses coded transmitter information as well as the client's received signal strength to determine the distance from this known point.


















 Paige Niedringhaus
Paige Niedringhaus
 Dan Fay
Dan Fay
 Dominic DeMarco
Dominic DeMarco
Any demo for iOS app using https://developer.apple.com/documentation/networkextension/nehotspothelper/1618921-supportednetworkinterfaces