 Radu Motisan
Radu MotisanNote: this is a complex project with many details. For the short version, please see:
Portable environmental monitor presentation
Production ready design document
Introduction
Last year (2014) I put my spare time to some really good use: I designed my first hardware product from scratch, and after prototyping and fixing software and hardware bugs it moved to production. This is how uRADMonitor was born, the first automated global radiation monitoring system, materialising in a short term a very ambitious goal!
The efforts have been recognised, and uRADMonitor went into semifinals in the HackADay.io 2014 competition. I didn't conquer the space, but did a good job at ground level, spreading the network across several continents.
Now, the stakes are high: build something that matters! I like challenges, but even more I like putting my knowledge into the service of my fellows, for making life at least a fraction better. Using the previous uRADMonitor experience, the plan is to use the current global network infrastructure and create a new mobile unit device, handheld - but packed with powerful sensors to measure pollution parameters, both chemical (toxic substances) and physical (radioactive substances). All data will be fused to the current uRADMonitor radiation data. Users will have the option to see trends in particular areas (far better then isolated / absolute measurements), or receive alerts when certain limits are reached.
Alternative uses include car exhaust checking, soil prospecting, or basement radon monitoring. The units act both as low power handheld dosimeters, but can be also deployed as monitoring nodes.
The rich collection of sensors cover alpha, beta and gamma detectors, and air quality sensors including basic parameters but also flammable and toxic gases. The new devices (called generically uRADMonitor model D) have a generous large colour touchscreen, a rechargeable battery and WLAN 802.11B/G/N connectivity, huge improvements over the radiation-only model A unit, featured in the previous project entry.
A totally new device, pushing the environmental surveillance to the next level, by using a veryfied global infrastructure of fixed detectors.

About innovation, obstacles and design details
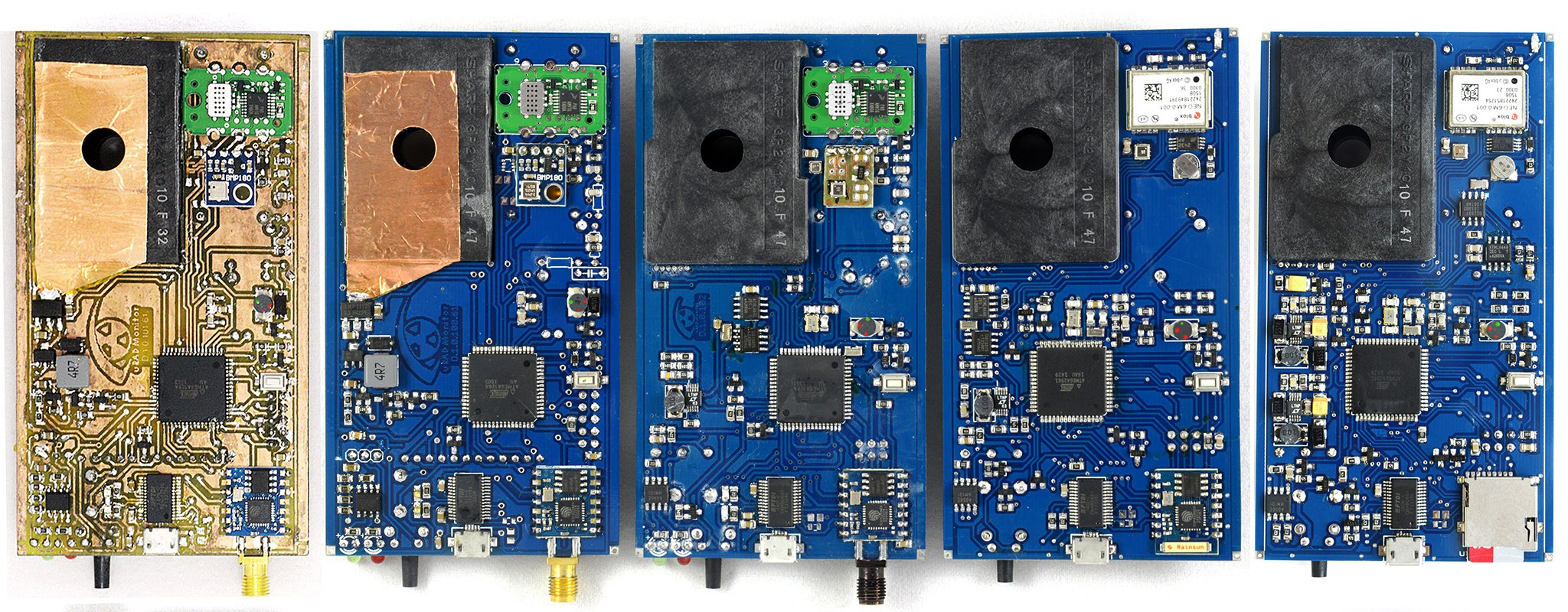
Soon after building the Radiation Network I realised there are other problems, with higher occurrence than nuclear incidents. Friends suggested extending the capabilities of this infrastructure to cover pollution, something we're all facing daily, in our crowded cities. These were the first directions. I also wanted to go for another durable construction, so I had to drop any form of plastic enclosures in favour of rugged aluminium. After all, that's how the last year's uRADMonitor units were built as well. It also had to be small enough to fit the palm of the hand for easy use. These initial requirements shaped the general guidelines of the upcoming product, but identifying the right sensors was still problematic. Particularly air quality was a vague term, implying many physical and chemical factors. The available sensors are either prohibitive because of cost or are energy hungry. Yet, a solution became available with the MiCS-VZ-XX sensors developed by a company in Switzerland, capable of detecting CO2 and VOC conveniently. Next step was finding a way of measuring dust and ensuring a dynamic flow through the air channel. That was done by using power dissipated by a regulator to heat the base region of the dust sensor and put air in motion, via a copper sheet. No energy wasted in vain, and everything was packed as compact as possible, including the LND712 sensitive geiger counter and its high voltage inverter. We're set to detect all three popular types of ionising radiation and this adds alpha and beta to the previous gamma only detectors, to open the way for sensing other damaging factors like the Radon gas, an alpha emitter. The PCB was designed to support both BMP180 or the BME280 sensors from Bosch. Here's Beta vs. Production variants: beta(2015) vs v103(2016) vs v105 (2017):
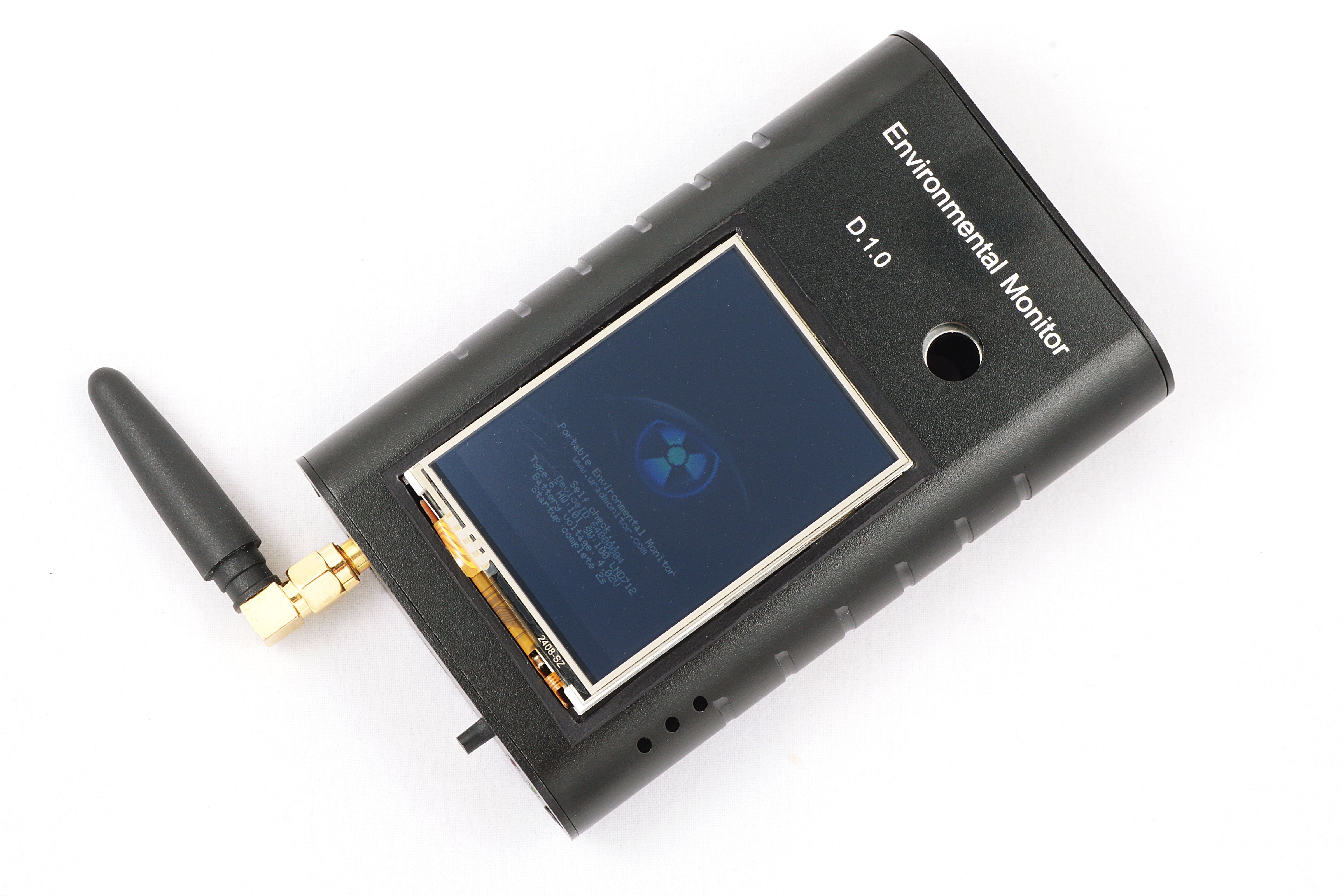
With all these powerful sensors, I had to offer the best user interaction, and this came thanks to a generous 2.4" color LCD with touchscreen. The units have a single hardware button, and that's a soft power on toggle (using a p-channel mosfet further controlled by the microcontroller). All the other user interaction is via the touchscreen, mounted on top of the strong aluminium enclosure, so you can press the touchscreen as hard as you want!
But for a complex system, hardware innovation is not enough, we need software too! It was the virtual component that was responsable for handling the sensor readings in real time, while also responding to user touchscreens with a nice modern interface, composed of fingerfriendly buttons, charts and settings, similar to a modern mobile Operating system, while having it running on an AVR Atmega128.
Beta snapshot:
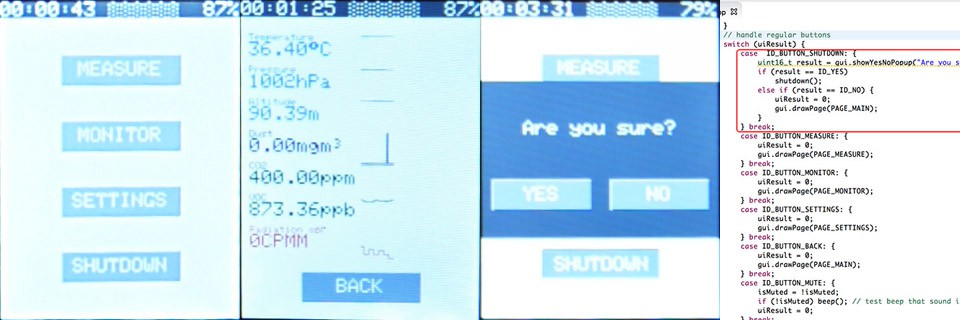
The post beta, current version comes with an improved, modern UI. The homescreen now has 6 main categories the user can access. Here is a snapshot:

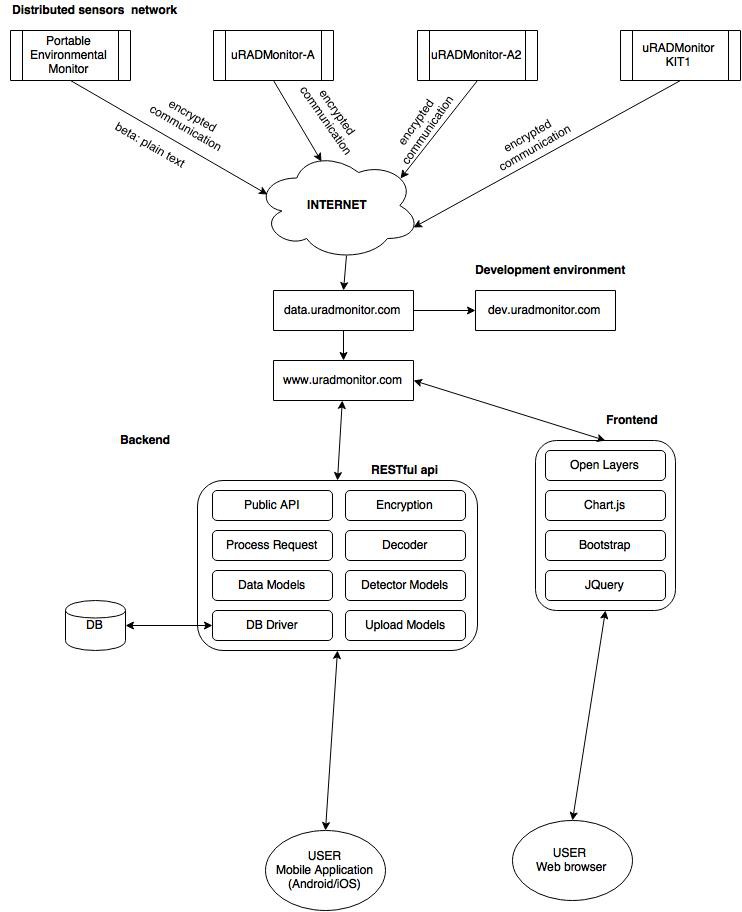
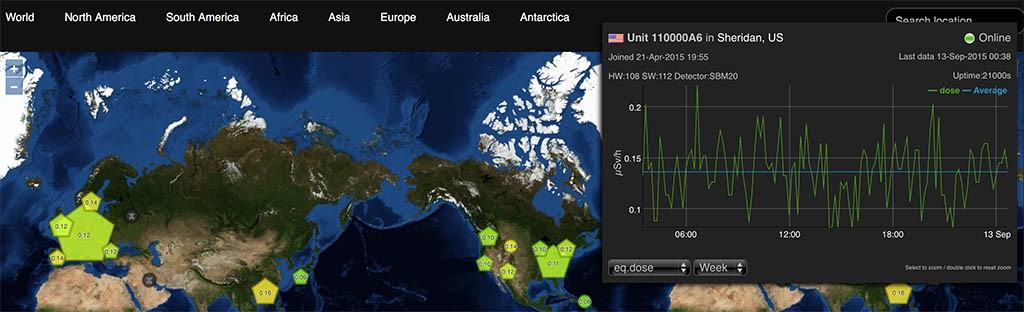
This was done with close to 3000 lines of code in Beta version only and close to 4000 in the current production version, all released as Open Source under LGPL v3 , including circuit design (Schematics + PCB) and Aluminium Enclosure CAD files (DWG) on Github Repo. The count doesn't include the server side code, responsible for centralising all data, that would add a few thousand more. Because, in a similar way to its model A predecessor , the Portable Environmental Monitor is equipped with a WLAN module, allowing it to send data wirelessly over the Internet to map Pollution parameters all across the globe, as model A does it already with Radiation:

The USB connector is used not only for charging the Lithium battery, but also for data transfer. Beta version already allows bidirectional communication set to 9600bps, where the user can insert commands via a terminal screen (ex: beep, shutdown , more to be added), while the device returns each minute JSON formatted sensor readings. Data access was covered as good as possible. After 60seconds, the backlight goes off, to save battery. More features will be added to the current hardware as the software is further developed, turning this tool into the ultimate mobile pollution detector!
Development has been tracked in detailed construction logs on this page and on my blog. The server improvements are also discussed here: Server upgrade / Site v4.0 and the current production ready hardware was presented on Model D – Production Ready! .
Stage 2 Video:
Stage 3 Video, showing one of the 3 Beta prototypes:
Stage 4 Video, showing the production units:
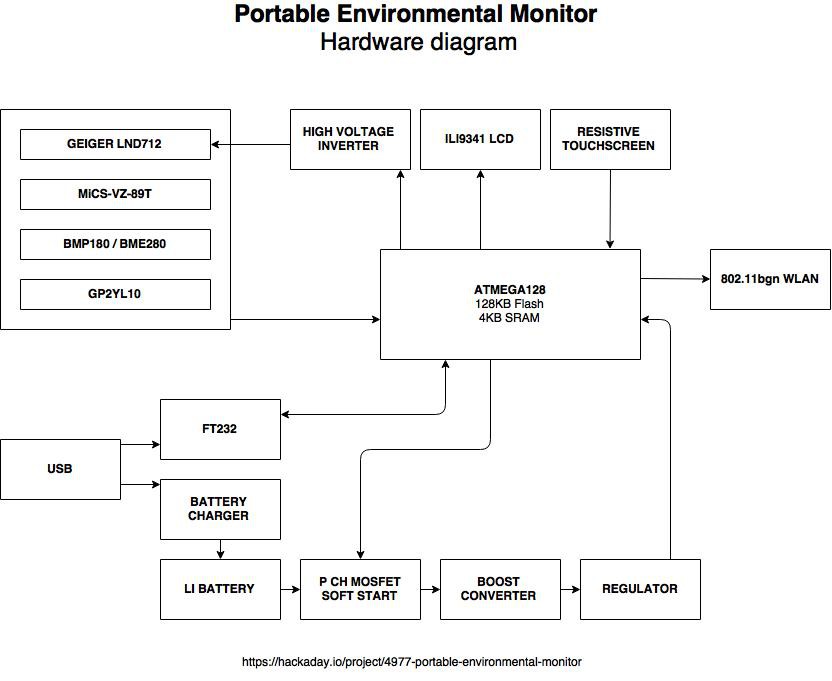
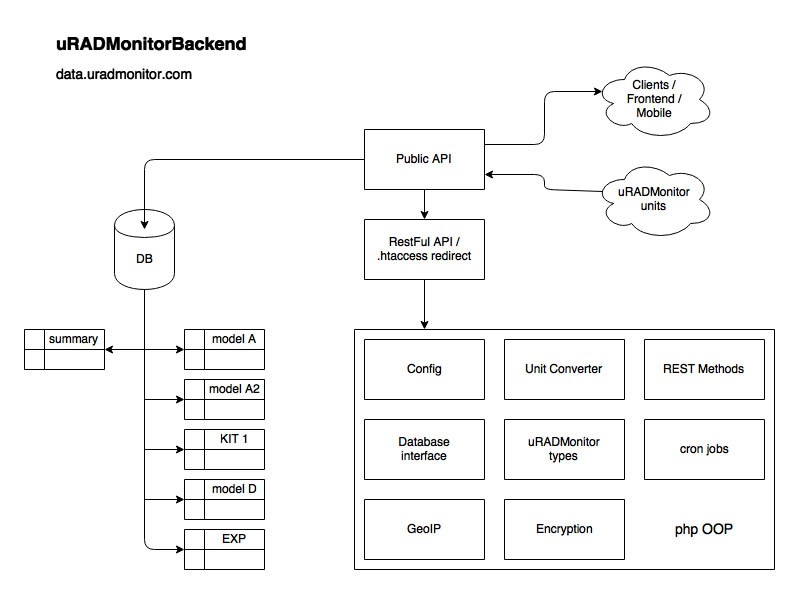
Hardware block diagram
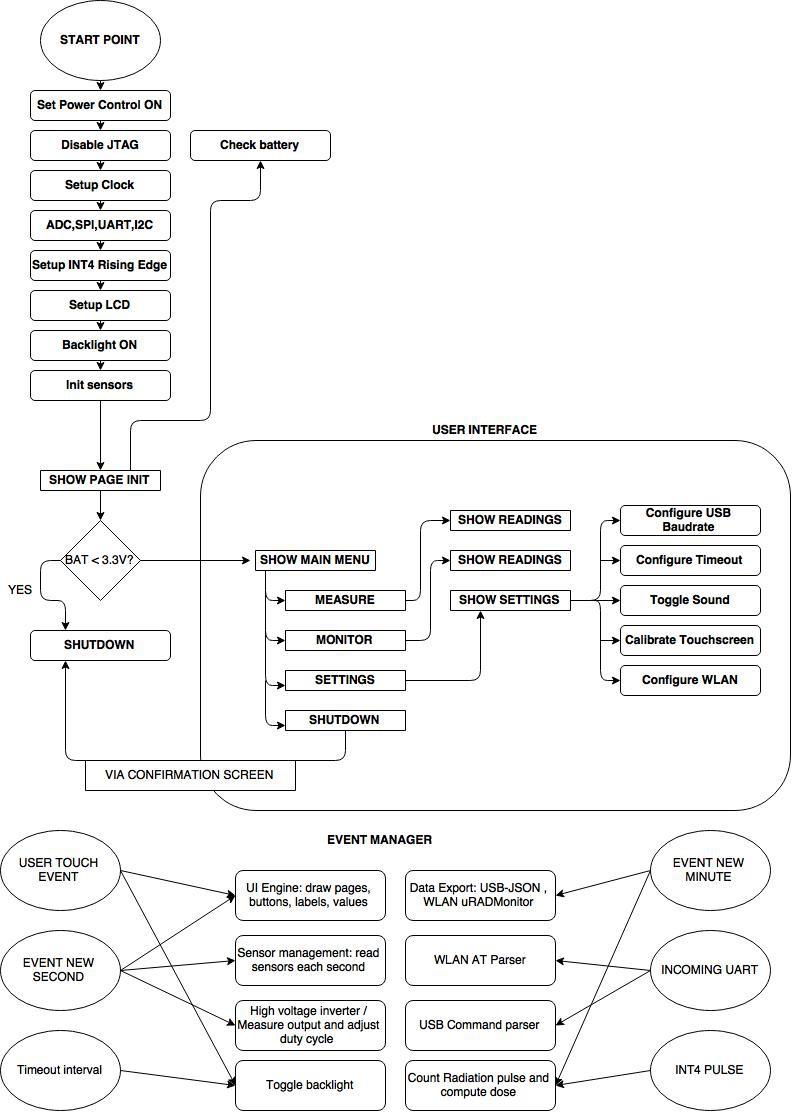
Software firmware diagram
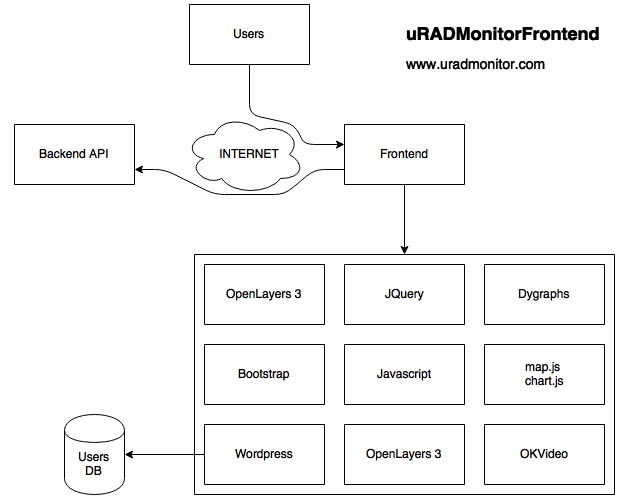
Server software diagram in Beta
2015-08-12: The Beta prototypes
After a sinuous but exciting road, the Beta prototype came out nice, the entire device is amazingly small: I was able to design it to fit the 110x70mm aluminium enclosure I planned initially without renouncing to any of the sensors nor reducing the 1500mAh lithium battery, as presented in the Stage 3 video.

There's the MiCZ-VZ-89 advanced air quality sensor measuring CO2 and VOCs in air, the neat LND712 Geiger tube for alpha, beta and gamma radiation including its high voltage regulated inverter, the GP2Y10 dust sensor and the BMP180 for temperature and pressure while the PCB allows soldering an additional BME280.
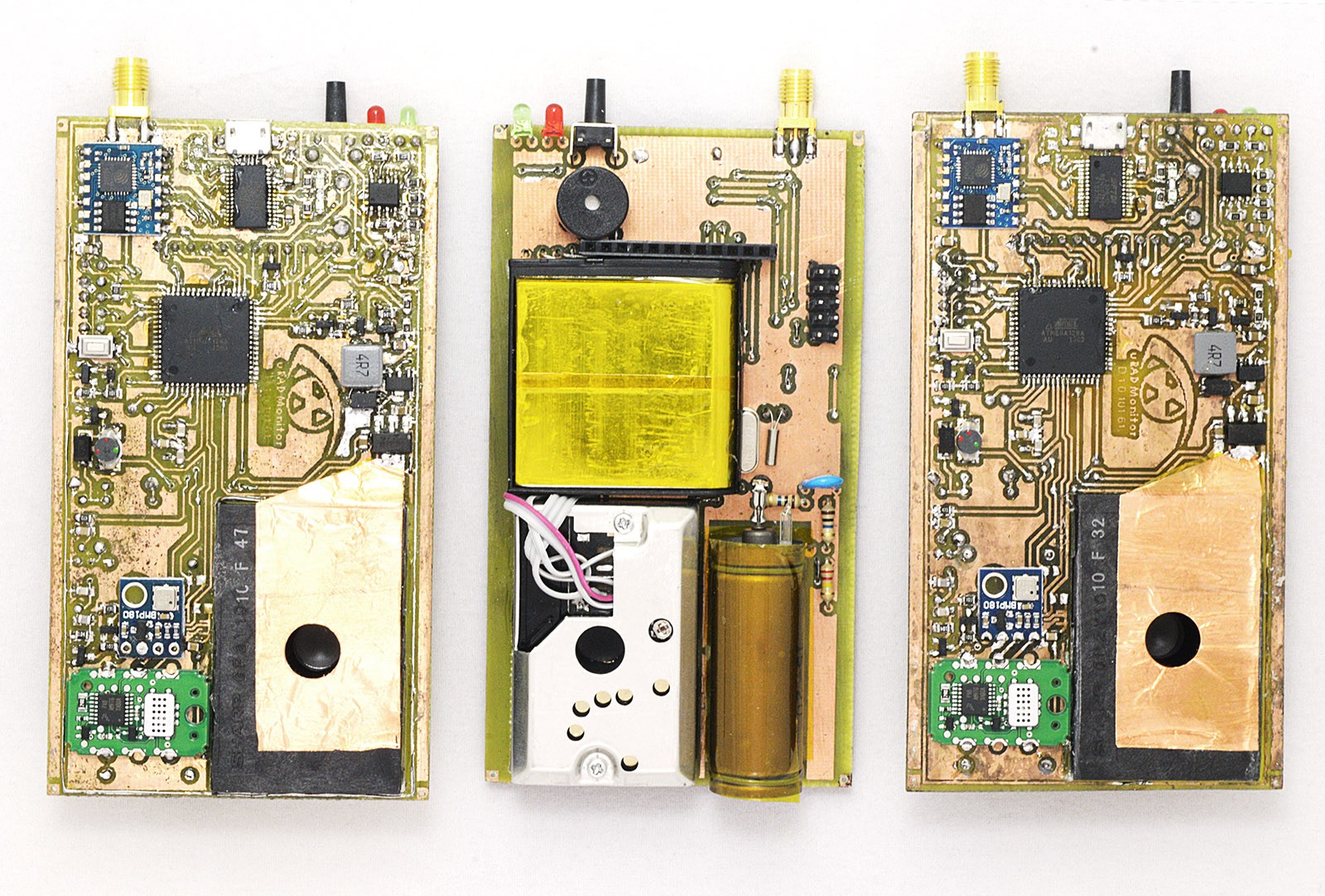
Component list is built below, but a complete BOM is available here. This beta gets very close to the final look and feel of the device, so a "productized" look would be very close to this image, plus the labels under connectors / controls / sensor holes:

2015-09-21: The production ready version
For the Portable Environmental Monitor beta release, both the project summary and the system design document presented some of the things to improve next. The first PCB was fine, but there was a linear regulator wasting power, that had to be replaced. Also, new ideas needed more hardware changes. All these were presented as a log, see: Post Beta hardware iteration or Docs: Beta to RC Summary .
With all these changes the new production devices can be used for 12h+ with WLAN on and the LCD used normally! That's a lot given all the internal activity including the 450V inverter and all the sensors.
 More on the final design in the project logs, or on Model D – Production Ready!
More on the final design in the project logs, or on Model D – Production Ready!
The server has also received upgrades, and there are now actually two servers one for the backend and one for the frontend. Details covered in logs Server Upgrade / SITE V4.0 and on the blog.
The block diagrams:
Project summary
Please see introduction and beta features on:
Portable environmental monitor presentation
And production ready version on:
Production ready design document
License
The Portable Environmental Monitor is released as Open Source, under LGPL v3 license, covering code, circuit and enclosure design, all available on Github. The data collected and centralised on the uRADMonitor server is licensed as open public domain (fully permissive license).
High quality photos project Gallery
Also available on http://www.facebook.com/uradmonitor


Things didn't stop here. The project development continued, and by 2017 v105 was available with several addons including sdcard, gps and the BME680 to replace the MCS-VZ89T. The WLAN antenna was dropped in favour of an internal antenna with carefully machined holes in the aluminium body to make way for the RF signal. The firmware got up to about 9000lines of code, and the UI and logic was reworked completely:

The production was outsourced to China, and the first batch of 60 model D units got ready to ship by May 2017.
Read more details in the project logs. Thanks to Hackaday for helping this project come true.