 hebel23
hebel23The MPU-6000 IMU (inertial measurement unit) board was not to get for a reasonable price.
Instead, I got an MPU-6050 breakout board for 2,55 € in China.
Unfortunately, the MPU-6000 and MPU-6050 are not 100% compatible. Thus, the MPU-6050, for example, no SPI but only I²C. With a small change at the Aero quad source is also not a problem.
#define MPU6000_I2C
#include <Platform_MPU6000.h>
#include <Gyroscope_MPU6000.h>
#include <Accelerometer_MPU6000.h>
I've found it here
How to compile the Aero Quad-source code is shown here:
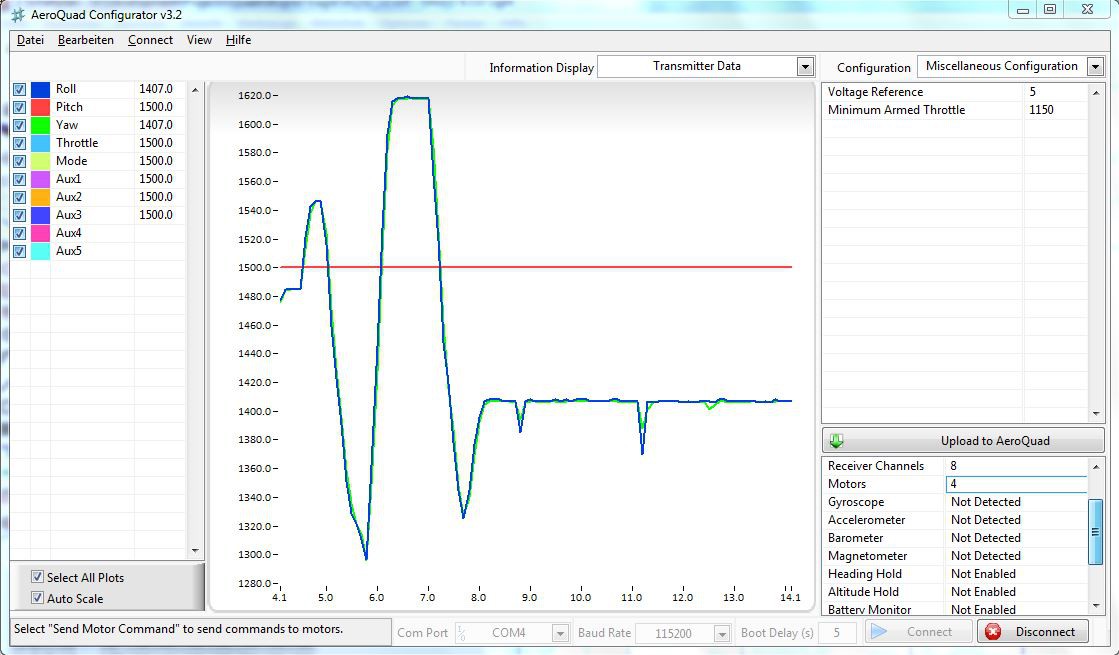
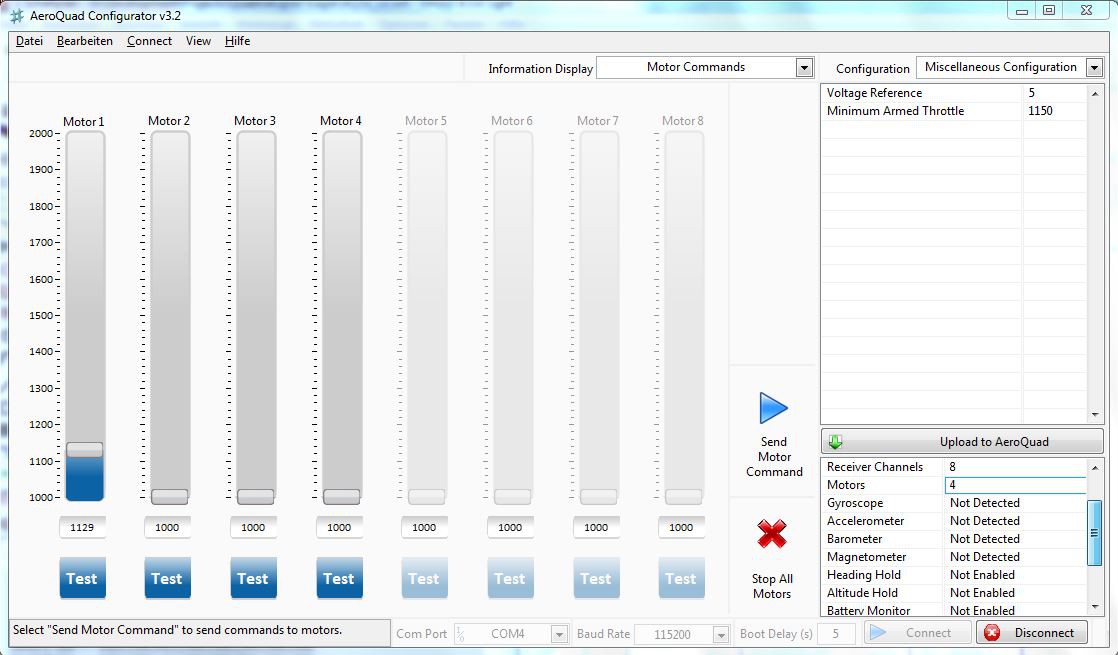
The Discovery board is connected to the "AeroQuad Configurator" through the USB/serial interface. With that software you can do several configurations and tests.
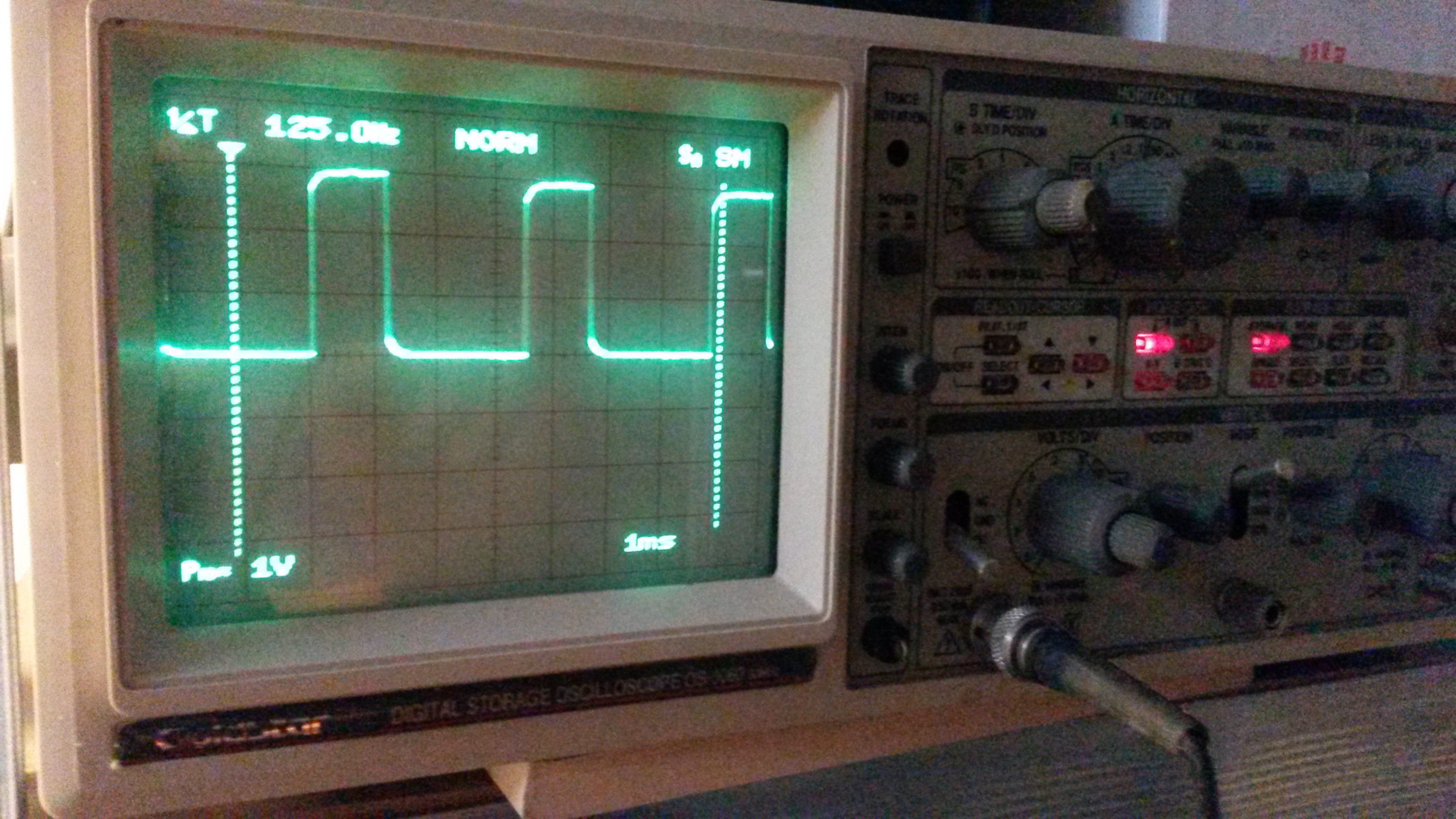

First of all I tried to simulate the remote control by my little frequency generator and looked what the motor output shows on the oscilloscope.
Fortunately by accident I found the the AEROQUAD Project. They developed an open source flight control for multicopter, running also on the STM32F4Discovery board!
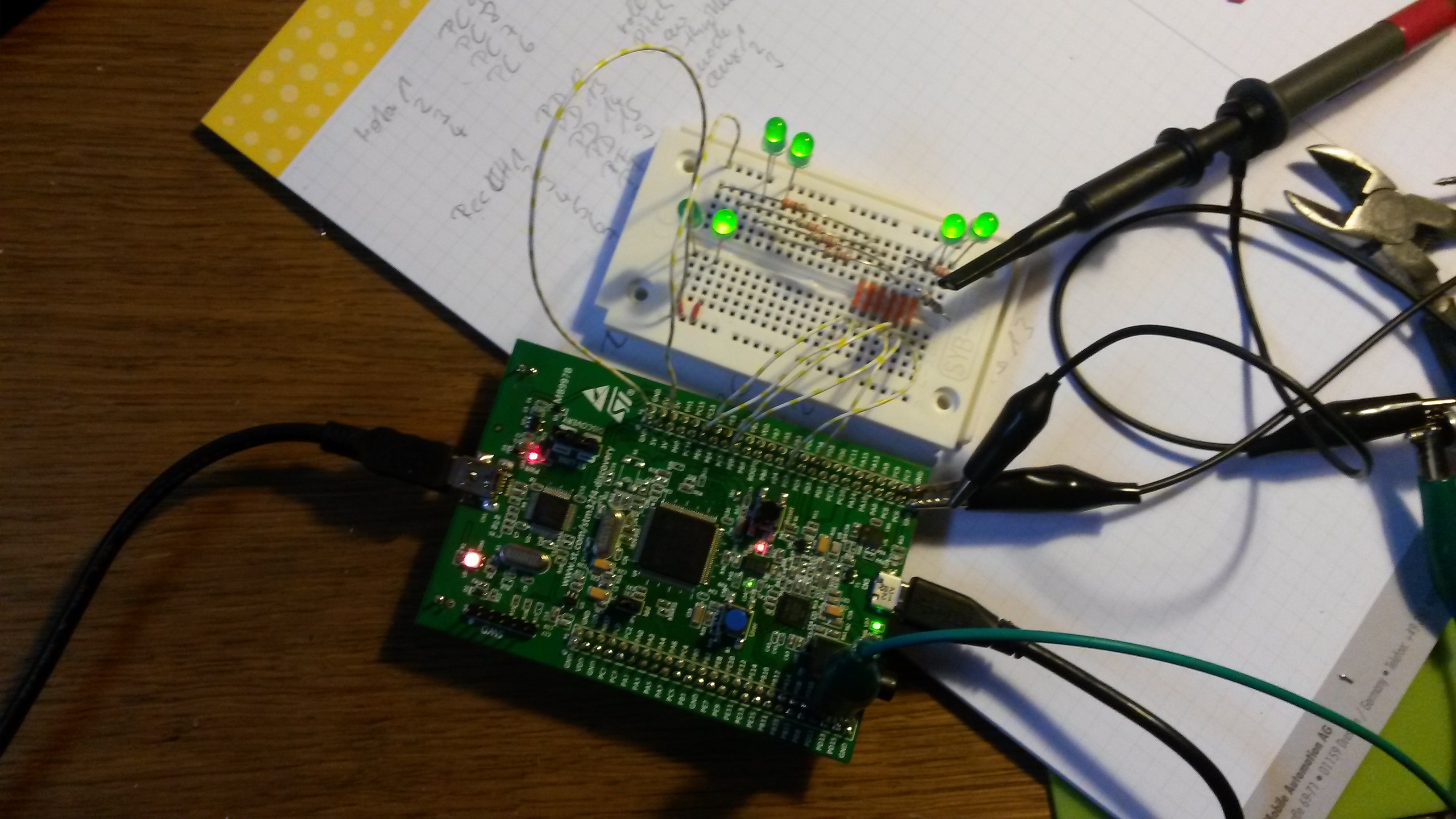
Because i had a STM32F4Discovery board laying around, I wanted to use it as the flight controller for the quadrocopter.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.