Here's what makes the Arachnio Due special:
- Integrated WiFi -- No extra parts to buy or integrate -- just load an easy-to-use library and connect to the Internet! The ESP8266EX WiFi chip on the Arachnio works beautifully with the Arduino core.
- ARM Cortex M4 Power -- The Arachnio Due takes advantage of the power of Atmel's ATSAM4S2AA running at 120 MHz. It has 128 kB of Flash, 64 kB of SRAM, a 1 MSPS A/D converter, hardware floating point support, a built-in RTC, PWM, I2C, and SPI
- Small and light -- The Arachnio is only 50 mm long, 18 mm wide, and weighs less than 10 grams with headers installed.
- Rugged -- Due to its small size, light weight, and the robustness of the SAM4S processor, it's hard to kill.
- Low power draw -- In deep sleep with the power LED removed, current consumption is below 50 microamps on a single Li-Po cell.
- Arduino Micro pinout -- The Arachnio uses the same pinout as the Arduino Micro and is only very slightly larger in order to accommodate the integrated antenna.
- Breadboard compatible -- Standard 0.1" headers enable you to plug directly into a breadboard for easy prototyping.
- Fully open source -- everything including the board layout and the network stack is open source.
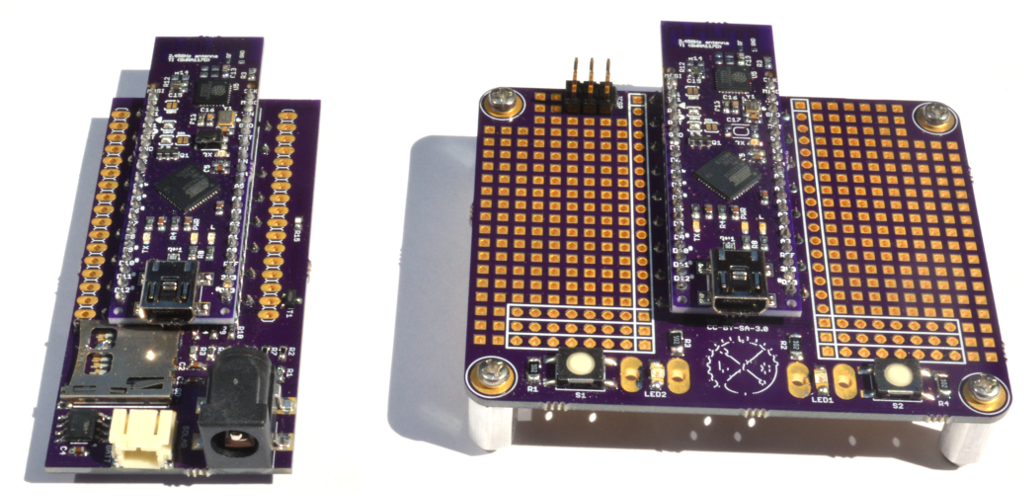
In order to make it even easier to get up and running, we're coming out with two expansion boards immediately -- the ArachnoProto and the Arachnode.
The ArachnoProto is a prototyping expansion board for the Arachnio. It has a reset button, a general purpose button, two LEDs, and a JTAG header for programming and debugging the SAM4S.
The Arachnode is perfect for building remote sensor and network nodes. It integrates a solar Li-Po battery charge, a micro SD card, and an optional Atmel cryptography module in order to provide a platform for building lightweight and inexpensive webs of Arachnios for remote sensing and other purposes.
Technical Specs
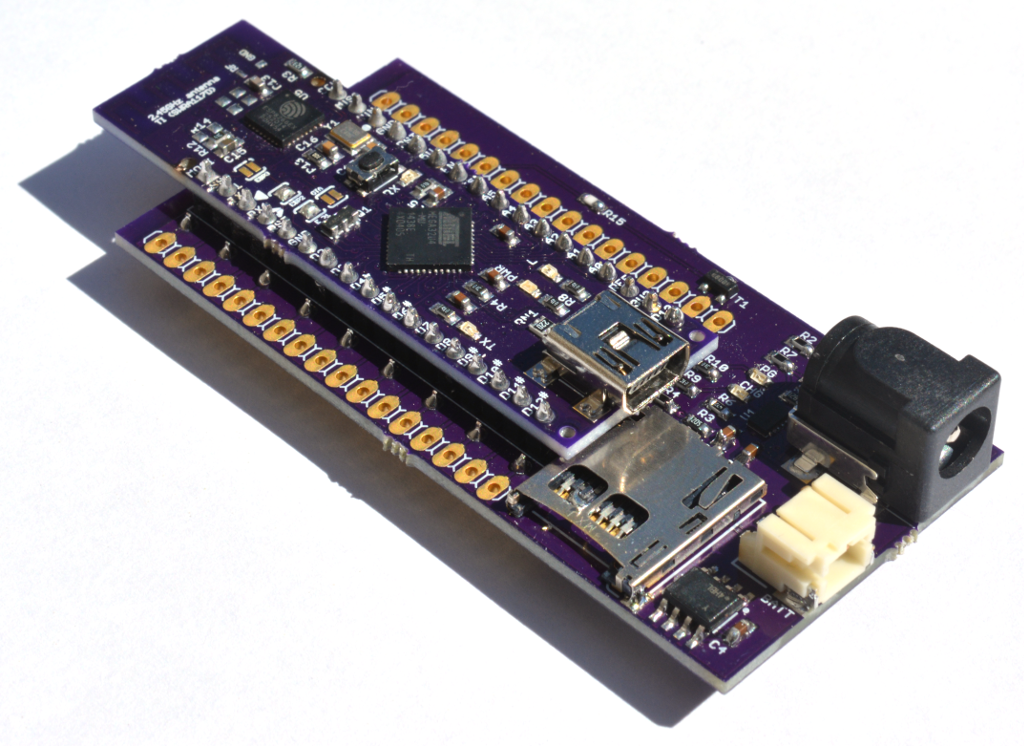
Arachnio Due
- Atmel SAM4S2AA ARM Cortex M4 processor
- ESP8266EX WiFi with printed antenna
- 128 kB flash storage on the SAM4S
- 16 kB SRAM
- 4 MB SPI firmware flash for the ESP8266EX
- 3.3V operation
- 120 MHz clock speed
- 24 digital I/O (14 dedicated)
- 8 analog I/O (6 dedicated)
- 8 PWM channels
- SPI, I2C, and 2 UARTs available (One UART shared with ESP8266EX)
- LED indicators for Power, USB TX/RX, D13
- Built-in real time clock
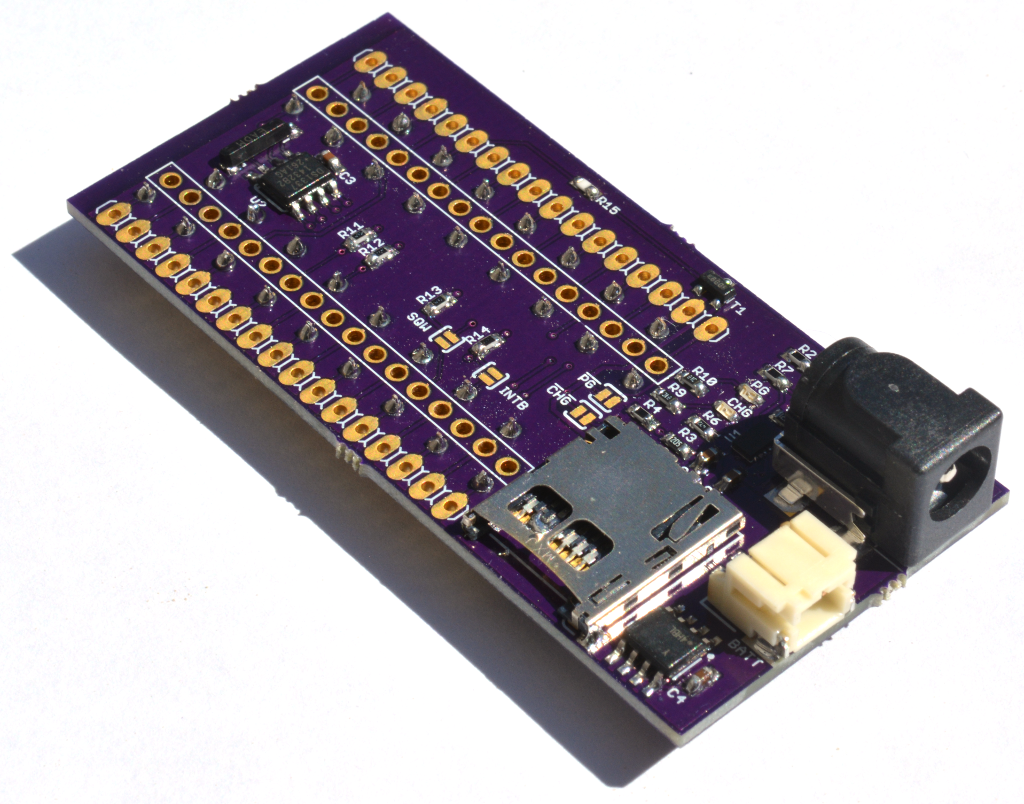
ArachnoProto
- Two LEDs
- Reset button
- General purpose button
- JTAG header
- FTDI cable header for independent programming of the ESP8266
- Two 2" x 1" prototyping areas
- Option to use standard headers, stacking headers, or bottom-entry headers for extra low profile.
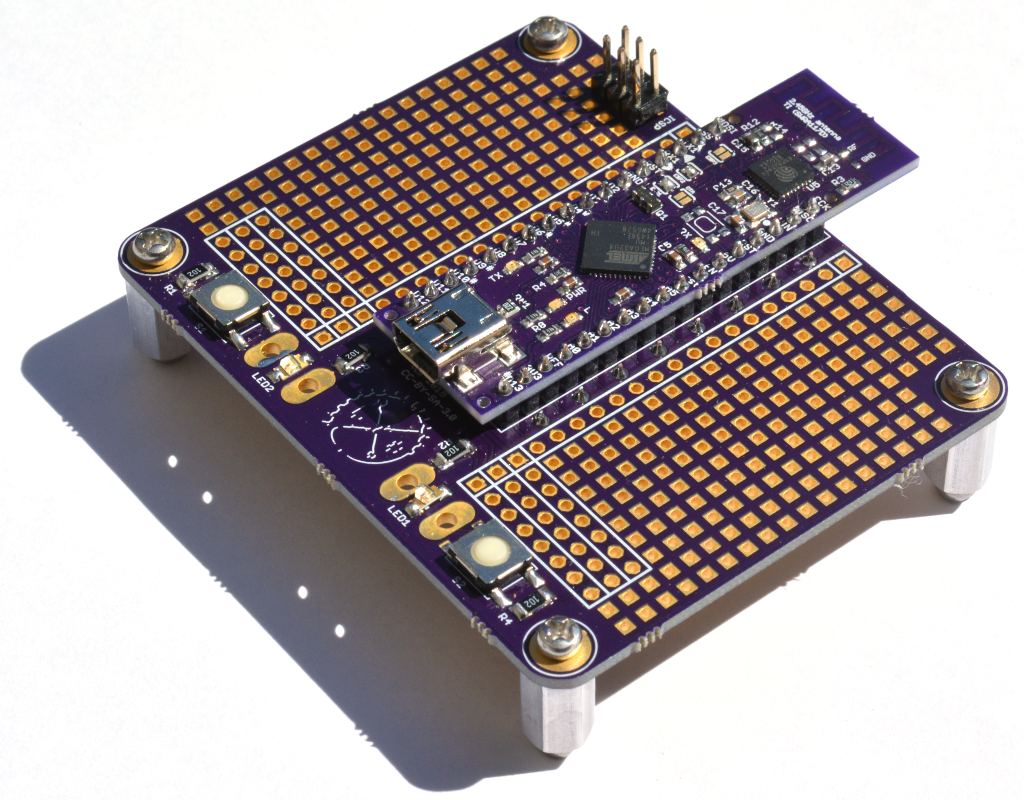
Arachnode
- BQ24210 solar battery chargerBattery fuel gauge
- Solar panel voltage monitor
- micro SD card slot
- Optional ATAES132 crypto module
- Option to use standard headers, stacking headers, or bottom-entry headers for extra low profile.
Suggested Applications
The Arachnio Due is an incredibly versatile board, suitable for all types of Internet of Things applications. Here are a few that we've thought about:
- Deployable sensors (as seen in our video) -- monitor a room, your garden, or anything else.
- Mobile robotics -- use it as a remote control or as the brains of any robot.
- Distributed LED lighting -- perfect for controlling mood lighting or light shows.
- Home automation -- wire it up to power control hardware to control your lights, climate control, or appliances.
Hardware & Software Progress
- Currently re-designing the ArachnoProto and Arachnode for the Arachnio Due
- Currently testing Arachnio Due prototypes
- Porting the Arduino WiFi library to the Arachnio Due (https://github.com/logos-electromechanical/WiFiESP)
- Thibault Viard is currently porting the Arduino core to the SAM4S (https://github.com/aethaniel/ExperimentalCore-sam)



 Timothy Woo
Timothy Woo

 Jeremy
Jeremy
where can I view the source files for the design? I am intrigued by your integrtated ESP8266 topology and I would very much like to learn from your design. Thanks.