0%
0%
Potpourri
Definition: A mixture of things, especially a musical or literary medley
 Peter Walsh
Peter WalshBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests








 The arm has six degrees of freedom using seven stepper motors, some of which are gear-reduced for greater torque. The design hides the internal mechanism: all the pulleys, belts and wiring are enclosed, making the whole project kid safe.
The arm has six degrees of freedom using seven stepper motors, some of which are gear-reduced for greater torque. The design hides the internal mechanism: all the pulleys, belts and wiring are enclosed, making the whole project kid safe.
 Florian Festi
Florian Festi
 Michael Graham
Michael Graham
 adellelin
adellelin
 brtnst
brtnst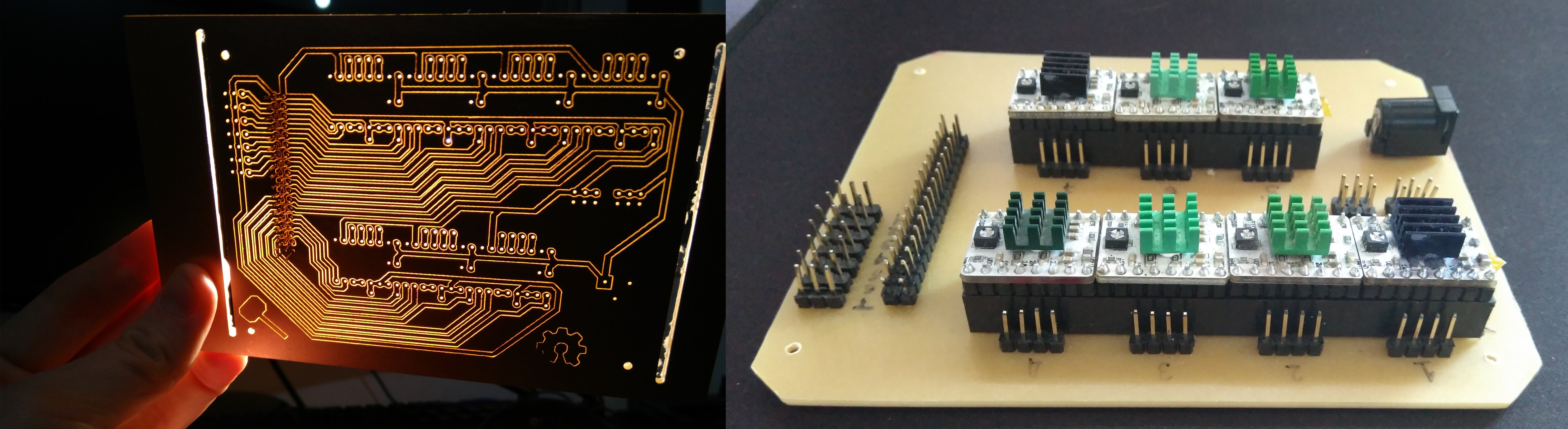{kind=link}