 Mike Rigsby
Mike RigsbyMy experimental results were confusing, so I needed a better grasp of the forces at work.
The front end of the dog would stand easily enough. The rear end refused--either the feet would slide, the entire dog shift rearward or some other odd combination. Tests indicated that the rear legs could produce the same torque as the front legs, so what was going on?
I decided to assume some experimental circumstances. From the left side, suppose that the left front foot is fixed to the ground and the shoulder is free to rotate. Change the knee angle from 60 degrees to 80 degrees.
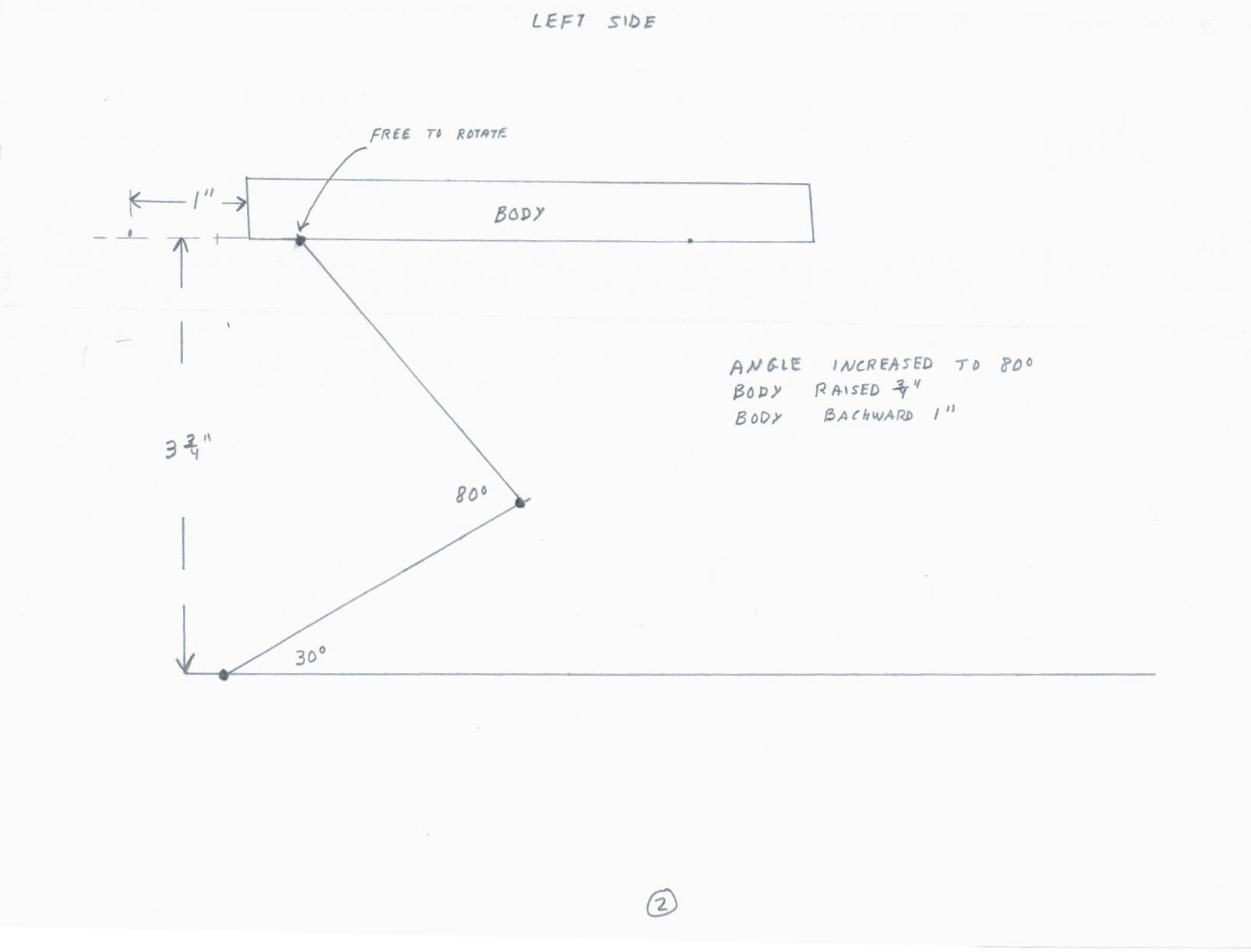
The body should rise and move backward.
Now, same imaginary experiment, but don't let the body move rearward--let the friction of the rear legs or some other force prevent rearward movement.
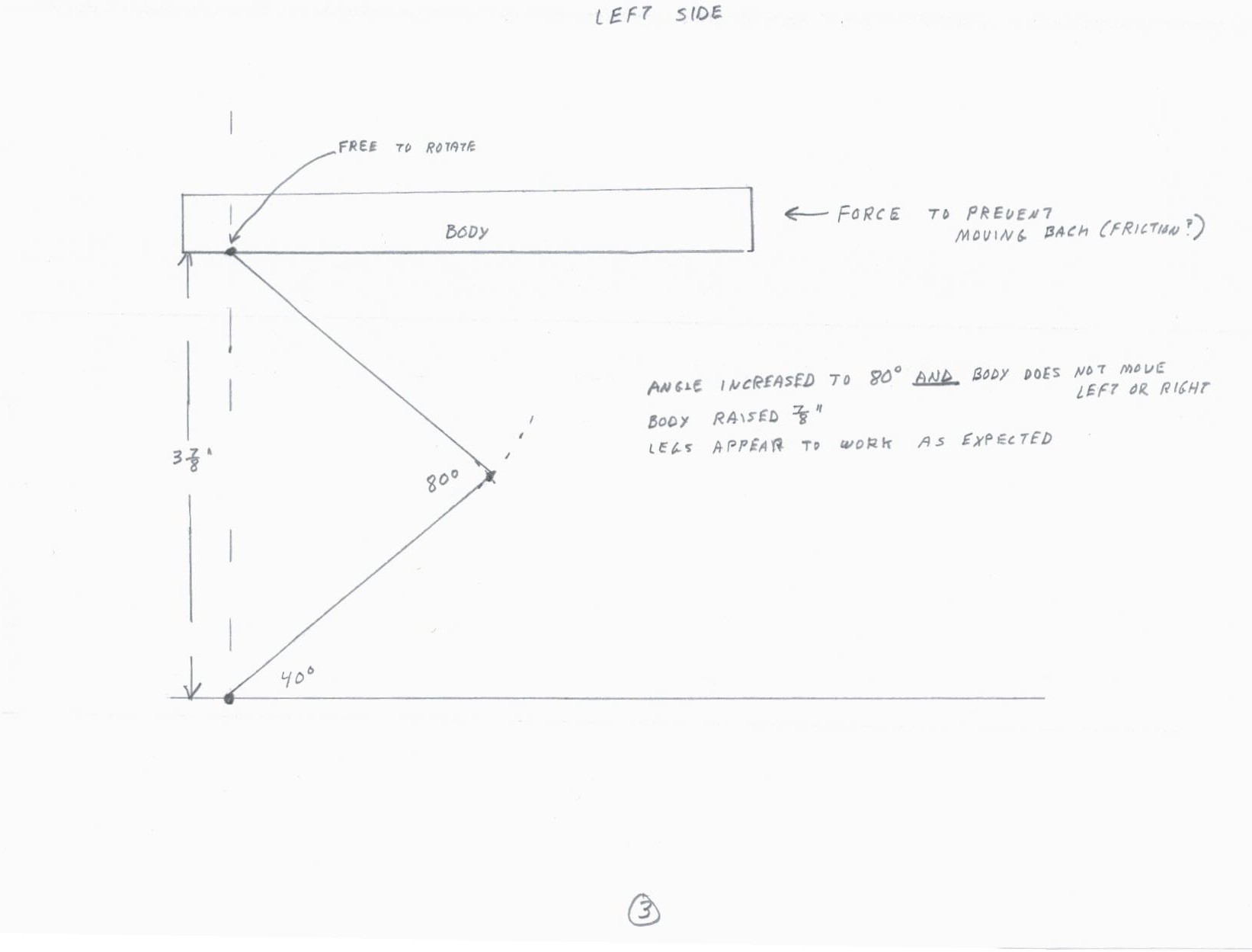
The body rises and the leg "looks" the way I thought it would.
Now, looking at the left side, let's assume the front and rear legs are operational--feet fixed and shoulders free to rotate.
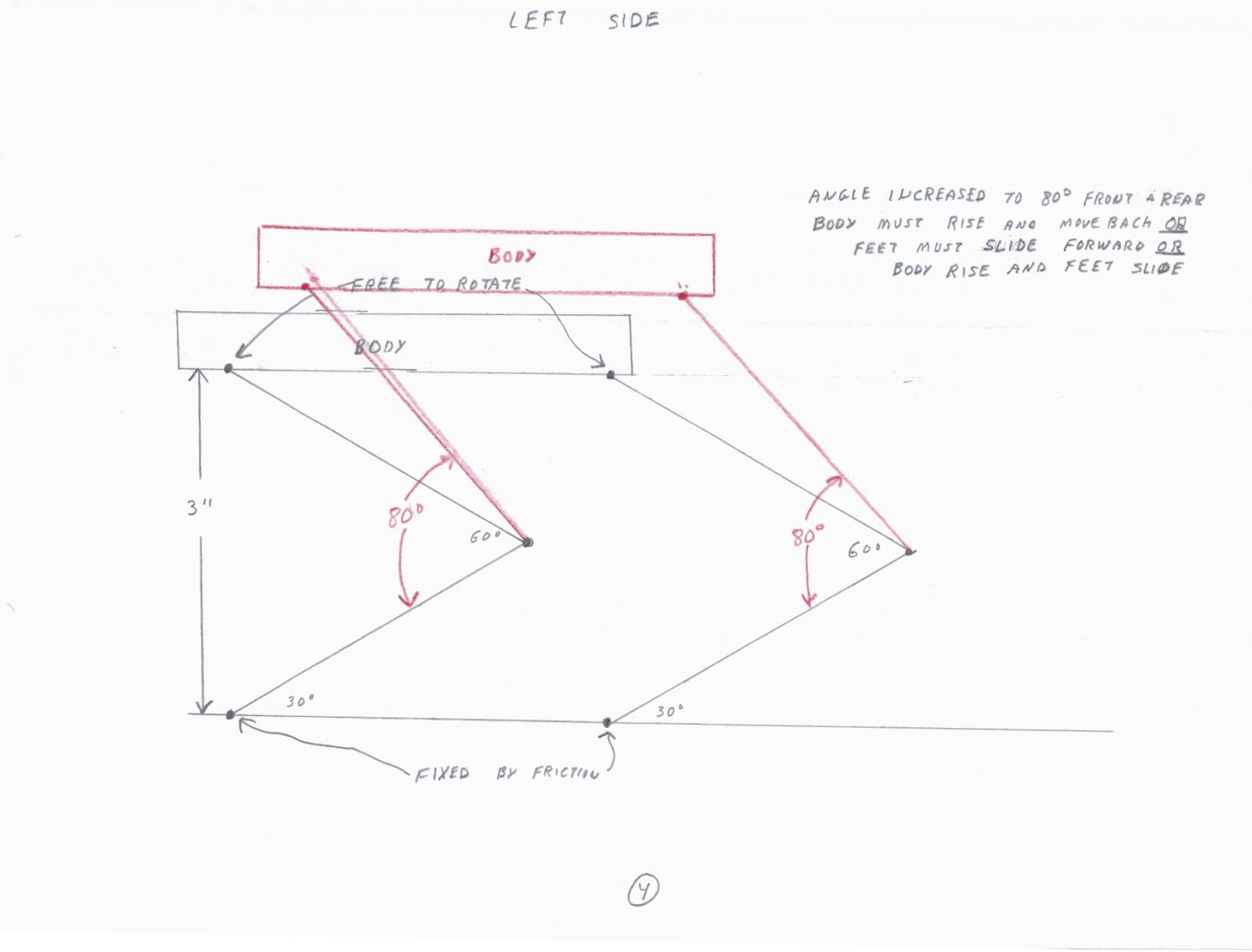
The body must rise and move rearward or the feet must slide forward or some combination.
Now, another thought experiment. From the left side, let's look at the front shoulder joint and assume that the shoulder rotates in the clockwise direction.
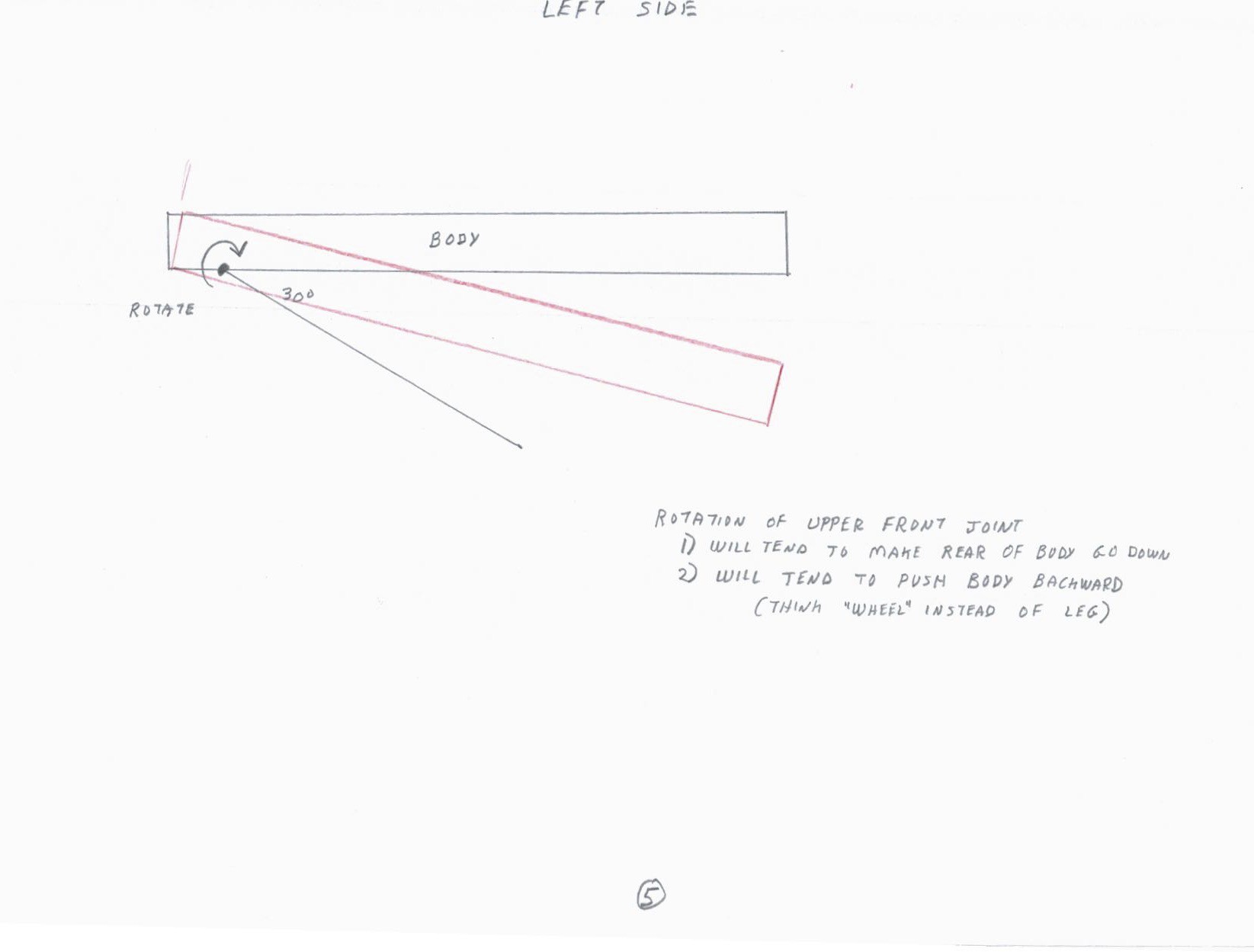
This will tend to make the rear of the body go down and it will tend to push the body backward (think wheel instead of leg and the "foot" (wheel) does not slide).
What happens when the rear shoulder joint turns clockwise?
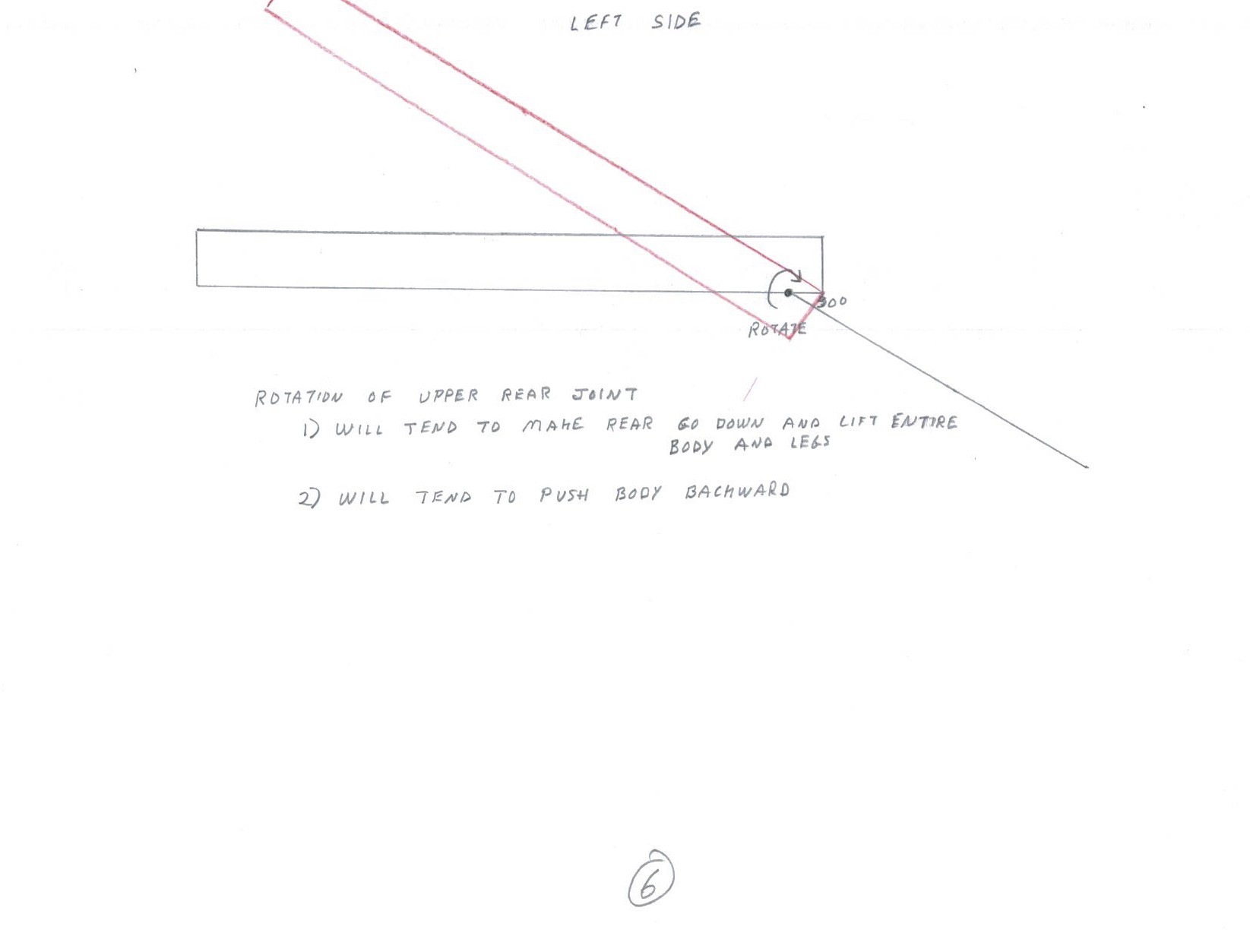
This will tend to make the rear go down and the front rise up while pushing the body rearward.
Everything seems to push the body backward and a couple of things work to push the rear end toward the ground.
Now, I'm pulling out my ace--in 1999 I purchased a Sony robot dog, Aibo.

To stand, Aibo's left front shoulder turns clockwise and his left rear shoulder turns counterclockwise.
I flipped the rear legs on my dog (right rear became left rear; left rear became right rear) and he was able to stand.
This doesn't explain how Boston Dynamics gets their dog to stand--but that's not my problem. Note in the "Details" that the "Anymal" dog uses the opposing rotation method.
For general information, while tearing my dog apart I noted that a leg assembly (including three 67 gram motors and two steel bearings) comes in at 808 grams. I need to reduce this in a redesign--just another thing to keep in mind.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.