 Mike Rigsby
Mike RigsbyThe dog stands, but just barely. As long as the voltage remains solid, motors don't overheat and all four legs share the lift in a fairly even manner, she will stand.
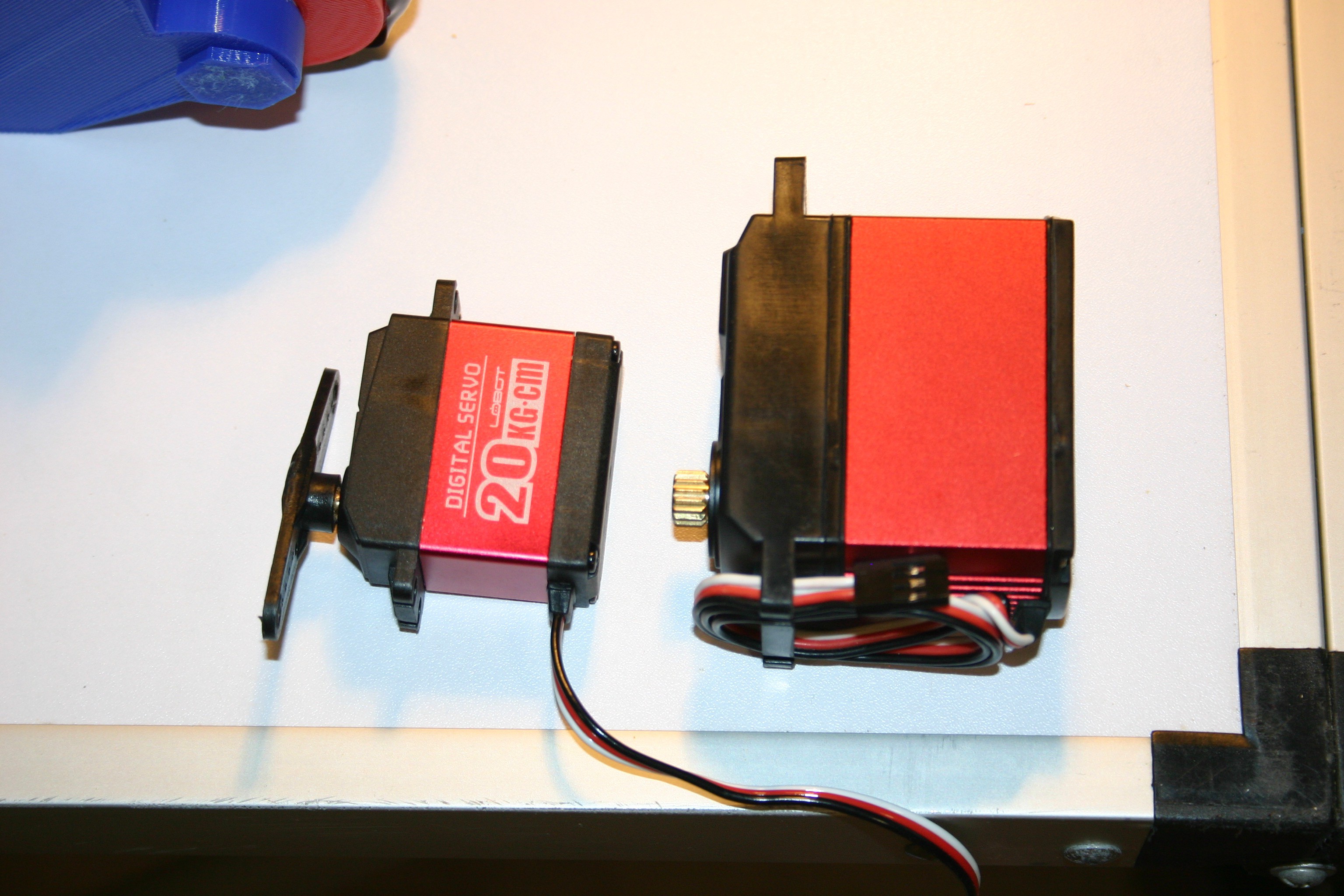
It's time for more torque. I'm trying a larger servo motor (1/4 scale) that provides double the torque of my current motors (550 oz. in versus 277) at slightly more than double the cost ($39.95 each).
Here's what the new motor looks like compared to the old one.
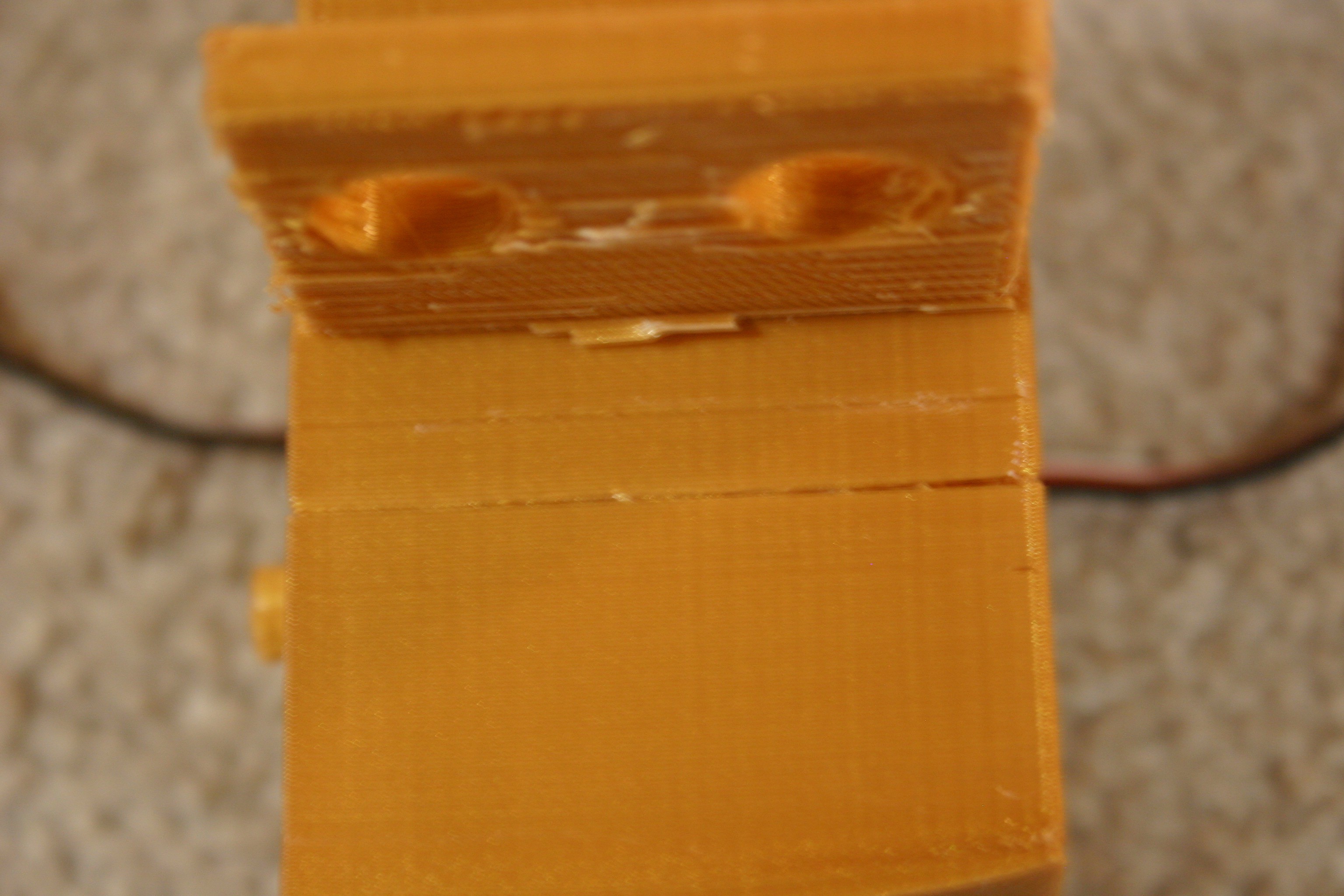
Now, to start the knee change design process. First, I measured the new servo and printed a template to see if the motor and screw holes would align.

Too precise! The motor has to be "angled in" to fit the cable; thus the length of the slot must be slightly larger than the length of the servo body to work.

Just adding a millimeter here and there resulted in a hole too large. Time to adjust again and reprint the template.

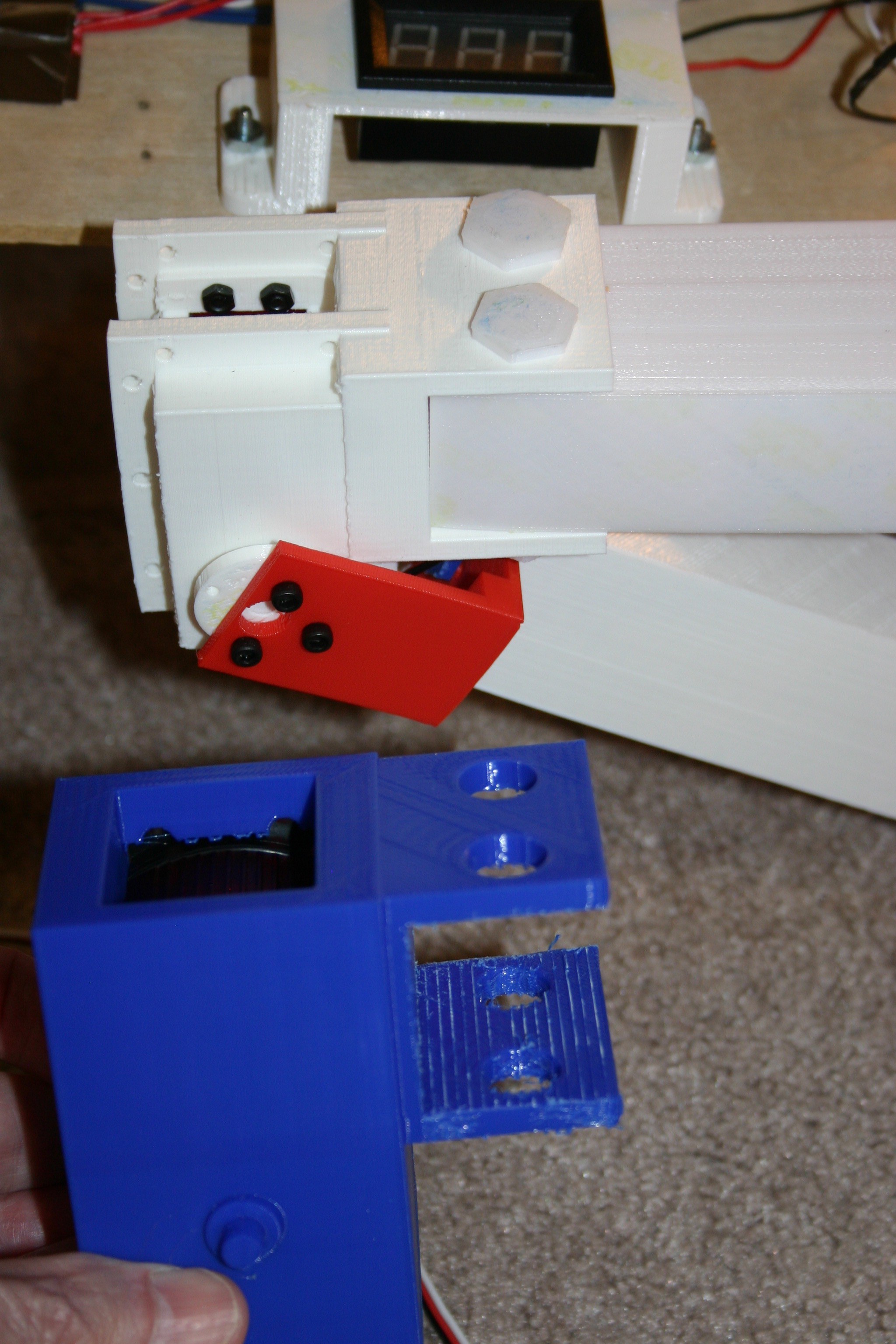
This is a good fit--now to add some depth and sides.
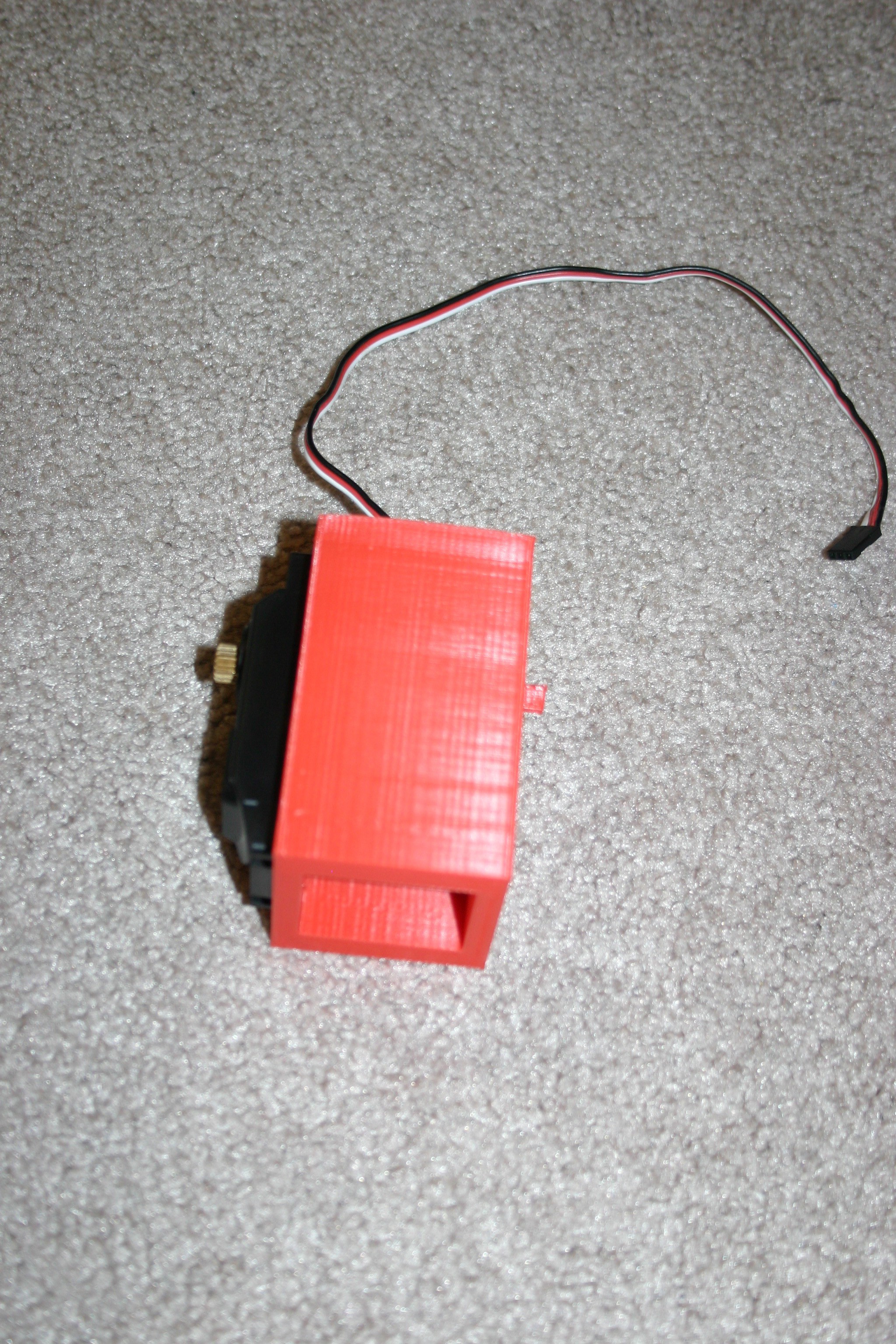
That looks good. Next, it needs to blend with the upper leg attachment bracket.
During the 4 1/2 hour print, filament on the spool was tangled and a weak layer was printed in the bracket. Time to change filament and print again.
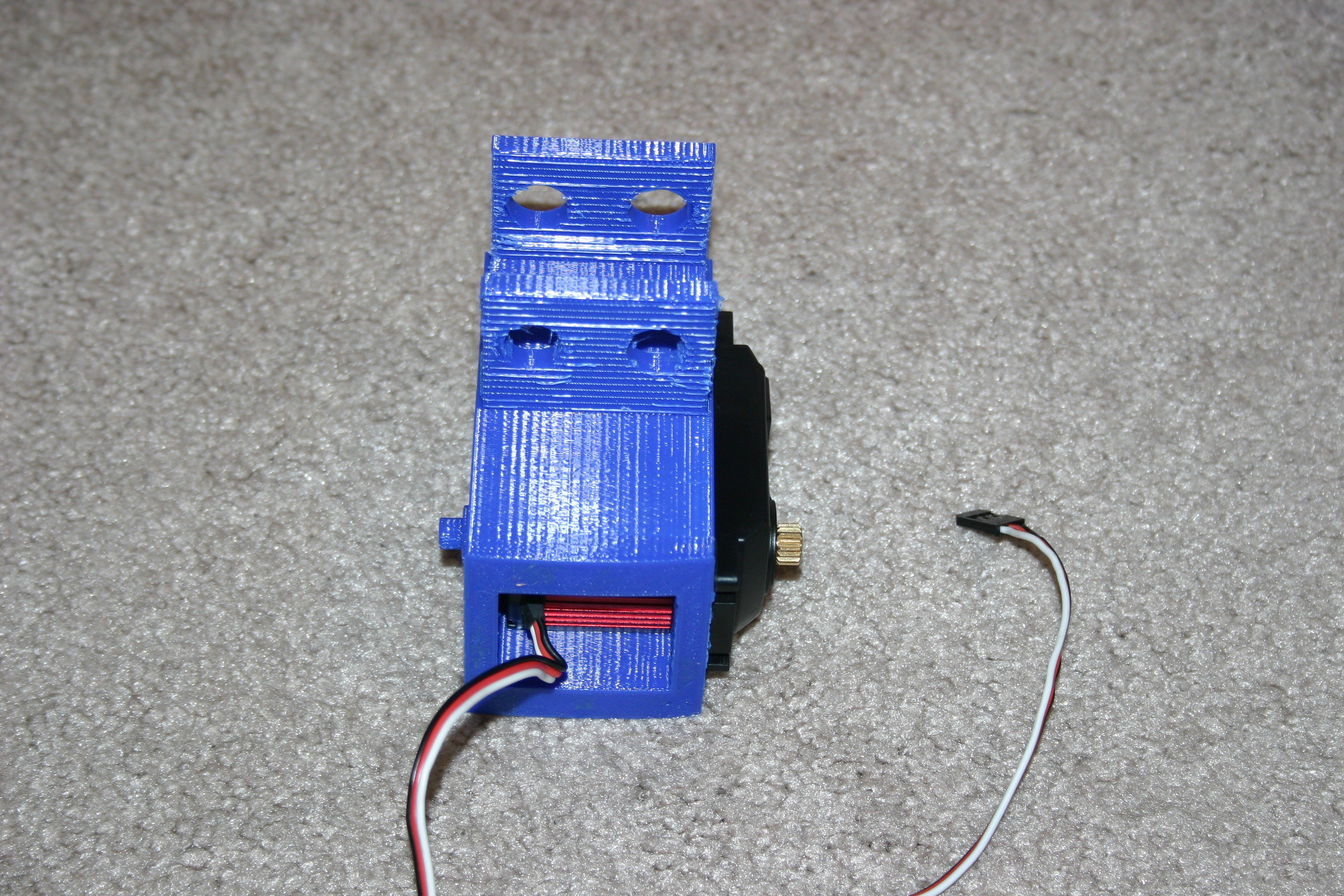
This looks pretty good.
I think this will work--of course I'll have to create a new receiving bracket for the lower leg.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
You are correct that weight is a concern. This is kind of like an airplane in that more torque means more weight and more weight needs more torque. I think I'm ok at this point--I believe I can reduce the leg assembly weight by the amount of added motor weight, so I'll just be requiring more battery weight (or shorter run time). Laikago (the Chinese copy of Boston Dynamics dog) provides interesting information in their specs (http://www.unitree.cc/e/action/ShowInfo.php?classid=6&id=347). Their total weight, with battery, is 22 kg. The motors represent 10 kg, the battery 4 kg, and everything else is 8 kg. I'm projecting a total weight of 7 or 8 kg. I'll redesign and test one leg--if that looks good, then on to four legs and see if that's enough torque to get reasonable performance.
Are you sure? yes | no
I hope this is not just another step in the weight inflation process, similar to what I had with my first walking robot: first I replaced the servos, which required a bigger battery, which made the whole thing too heavy for the new servos, so they got replaced again, etc. — in the end I broke the loop by making the robot smaller, not bigger, which made it much easier to test, and made the cube law work in my favor. Still, a dog-sized robot is definitely a great thing.
Are you sure? yes | no