 Mike Rigsby
Mike RigsbyThe left rear leg has to come off for new motors (twice the torque) in the shoulder and elbow joints. First, the wires have to be disconnected.
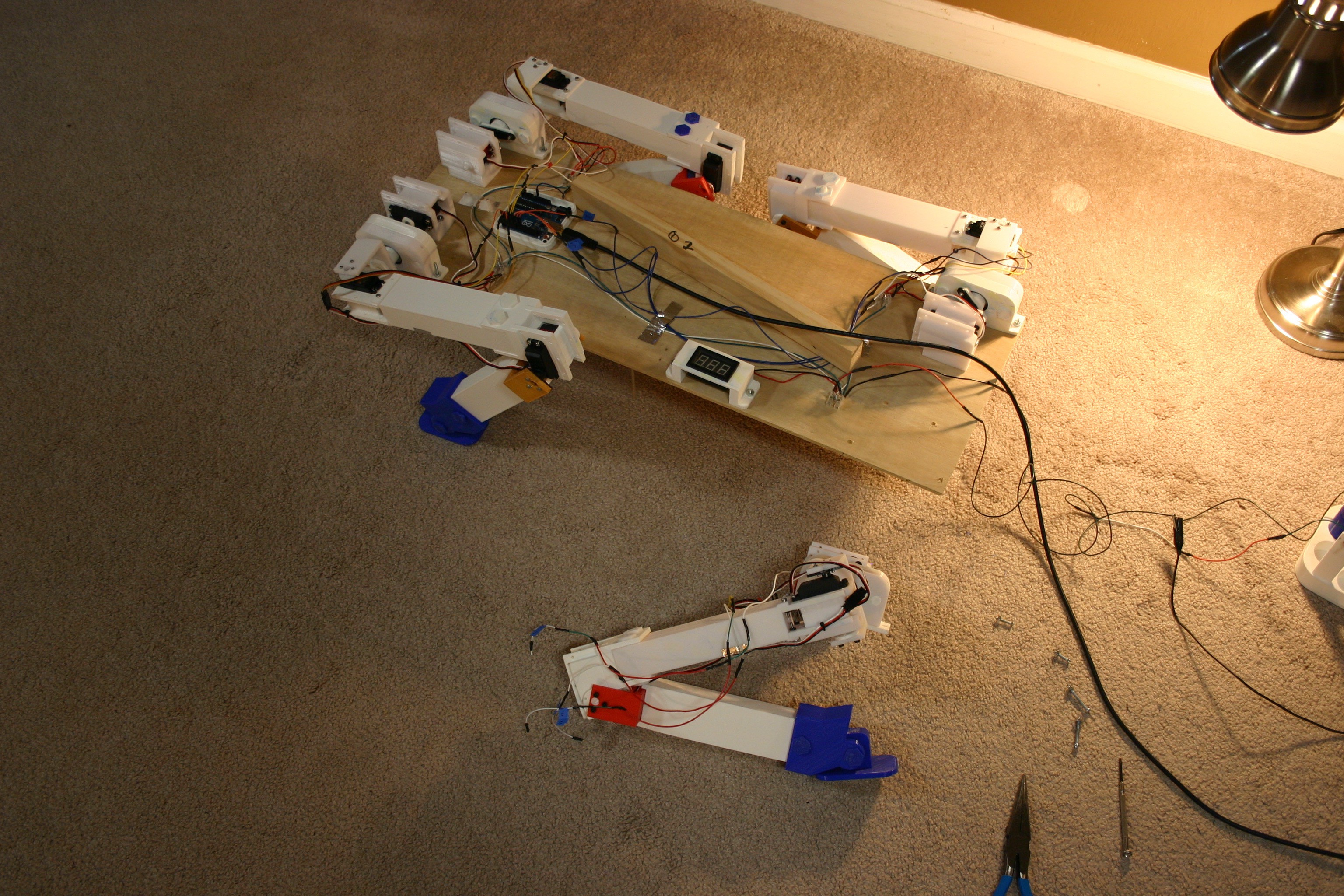
Next, the leg is removed from the body.
The total leg assembly will require design tweaking to keep the weight down and minimize some sharp edges (I don't want to get hurt--the motors are getting pretty powerful now). A good leg assembly could be a "module" for the Robotics Module Challenge.
I put the existing leg assembly on the scales and it came in at 900 grams.
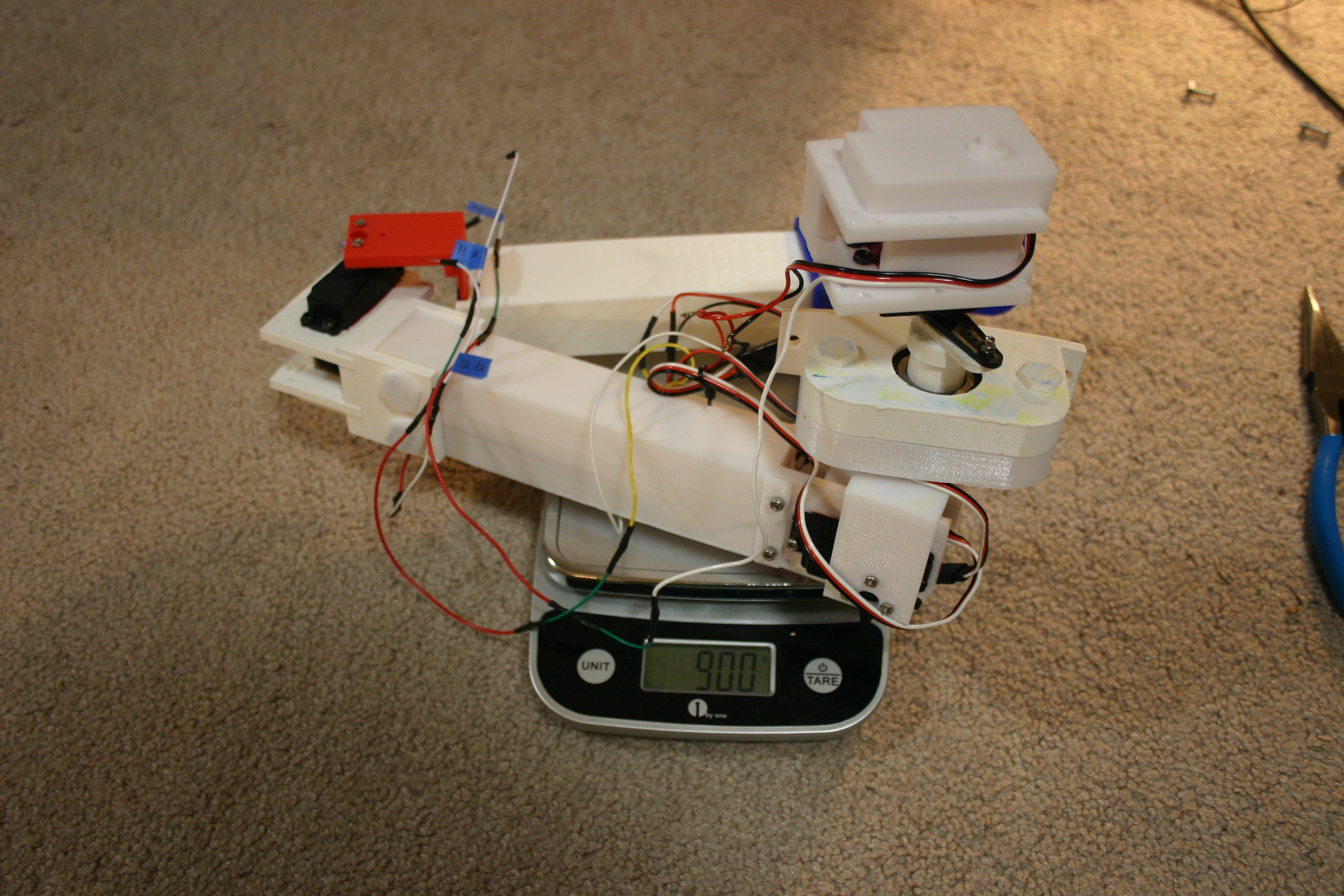
The shoulder motor and bearings (existing) are 351 grams.
The new (larger and heavier motor) shoulder motor and printed bearing comes in at 280 grams.
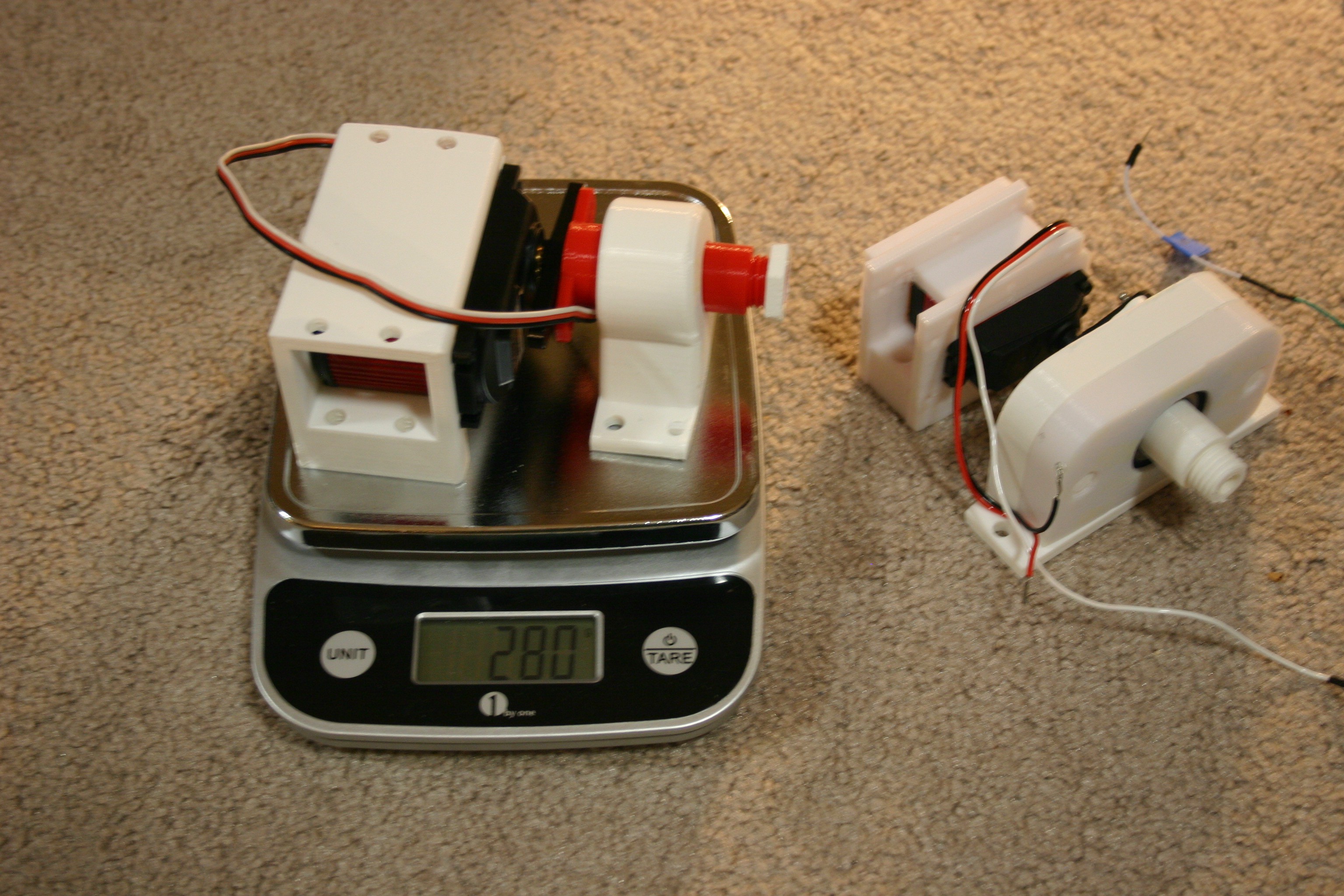
At least it's going in the right direction--I would love to have the new leg weigh the same or less as the old leg.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.