 Tyler Anderson
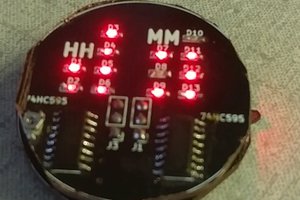
Tyler AndersonThe controller is a PICAXE-14M which uses a ULN2803 darlington driver to drive the LEDs.
On my car, there is no constant 12v supply to the tail lights, so I designed the circuit to operate in two modes. When the controller sees that the tail lights are on, it does the animation. When the tail lights are off (and its only getting intermittent power from each blink) all the LEDs turn on like normal turn signals. The normal mode also seems to give a little more visibility during the daylight.
Animated:

Normal:

The code is pretty simplistic. Its just a loop that takes a set of 11 frames (1 byte each) and spits them out the IO pins. You can change the animation to do whatever you want by editing symbols a0 through a10 at the top of CODE.BAS
Since its a PICAXE, the code is written in BASIC. Eventually I should redo it in assembly since there is a short delay while the bootloader runs.
There is also a big fat 10W power resistor. This simulates the load of an incandescent bulb. Otherwise the blinker relay would think the lights were burnt out and go too fast.
The schematics and PCB were designed in Fritzing. This was my first time etching a PCB.




 Moritz Walter
Moritz Walter

nice project :) can i ask you something silly, its off topic sorry, we dont have picaxe or genie in my country only pic from microchip, is it possible to use pic(s) with picaxe programming tool and cable or with circuit wizard and its cable instead of the specific pic(axe/genie). thanks in advance hope someone can confirm this so i can buy the tools i really like the programers esp the circuit wizard one.