The first prototype system we built around the Redtree Hydra was a rover. We got a small rover online and added the Redtree Hydra to it, along with some QEIs to measure the wheelspeed, and xbox controller receiver to control it (although you can actually control it from a computer over the network as well) and some power electronics to power it from a drone battery. (I'll detail this more in a full build instruction type of post later for anyone interested in trying to build one of these themselves).
Here's a few pictures and videos of the first versions of the rover:
(version 1: running on some really early prototype hardware - not all of our boards are being used yet - no I/O cards - just some hacked together stuff mostly to test the software out)
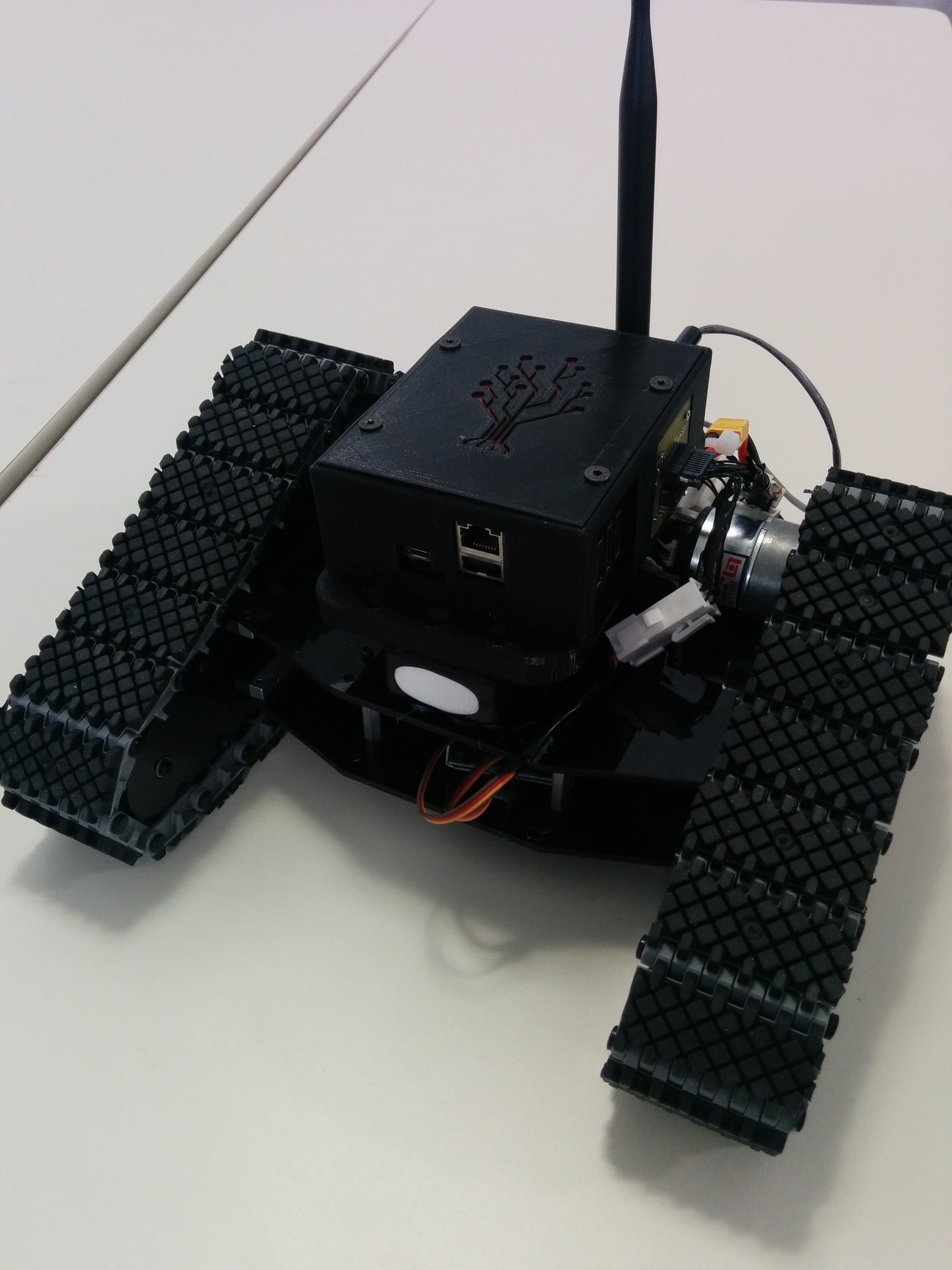
Our most recent version using the prototype I/O card and our full hardware as well the software. In addition to providing the motor control for the robot, it is also possible to add a variety of other sensors, cameras - even a full robot arm and control it all with this single computer. In other projects this is often done by adding another micro controller or processor every time a new component is added to system. By keeping everything connected to one unit, it becomes more maintainable and easier to work with.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.