0%
0%
Stair-climbing self-balancing robot
An awesome stair-climbing robot, capable of climbing large obstacles!
 Dominic Robillard
Dominic RobillardBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 tab
tab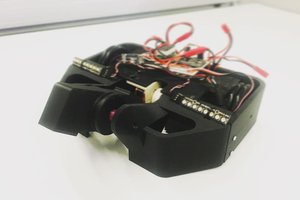
 Rogue
Rogue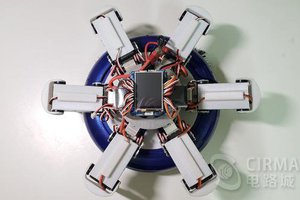
 Cirmall
Cirmall
 Igor
Igor
Hello. This robot interests me. I would like to build a modified version, a bit longer, say 1.5", making room for realsense electronics. Would this extra length impair the stair climbing mechanics?