 Ossum
OssumToday I finally got a chance for some quality time with the Dremel. I have decided to drive the arms directly with small 9g servos. This meant removing the square bar that connected them and carefully chopping away various protrusions, including the two little stubs that limited the arms' movement. Since we will no longer be using AA batteries I was able to cut into the battery bay and use some of that space for the servo bodies, as well as using the bay itself as a support.
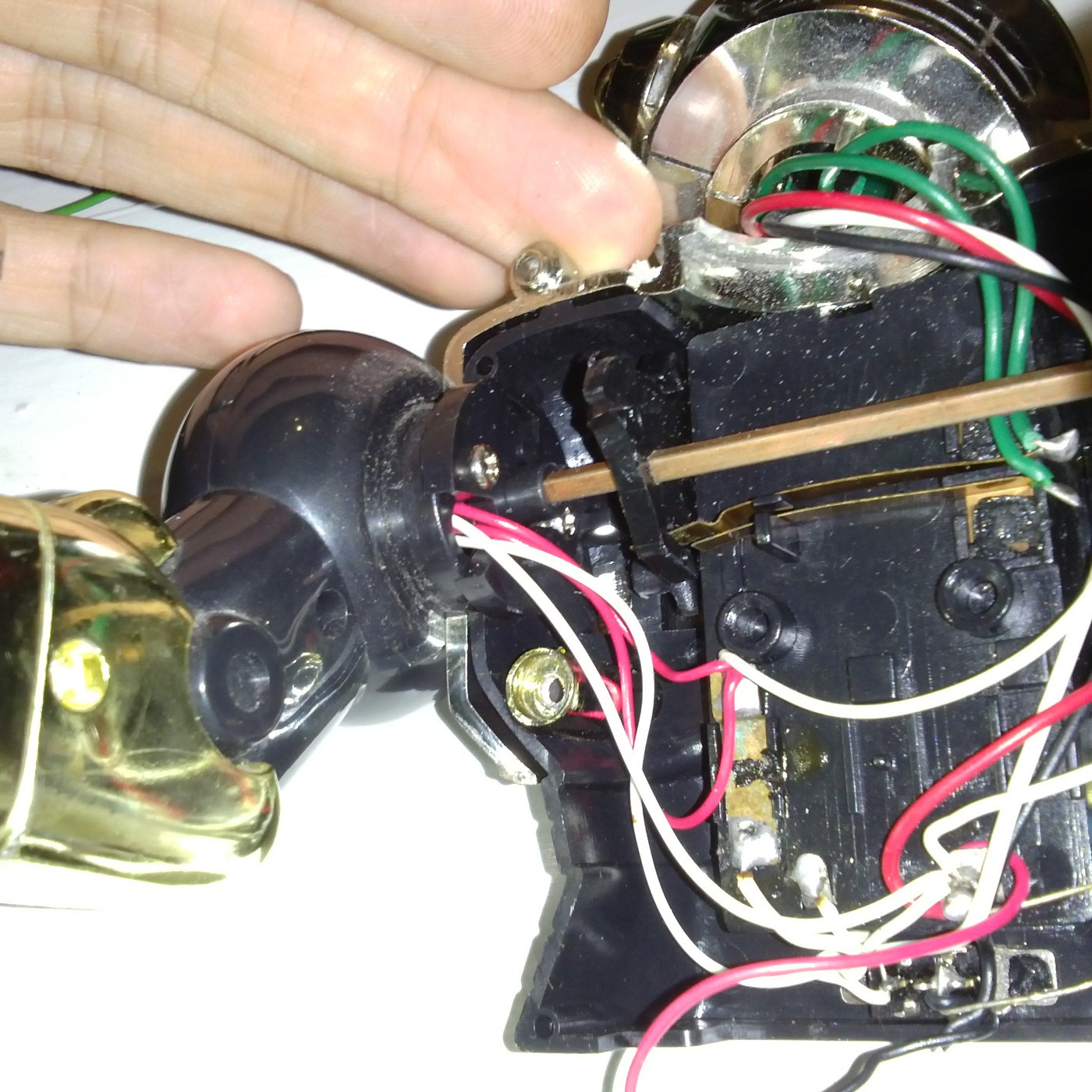
Here you can see the original guts of the shoulder
And here we have the new and improved version

For good measure I present you a video of a headless robot waving his arms like he just don't care. The servos are simply hooked up to a servo tester, which is why they move in opposite directions, being physically inverted. This will be easily fixable in software of course.
I have also made some exciting developments in the leg drive system, but I shall leave that for another log when I have it all put together.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.