 frederiek.vandepitte
frederiek.vandepitteSo for the last part we needed a way to get an x,y,z coordinate. We had some idea's how but we ended with Stereo vision.
With just 2 motes we could calculate an x,y,z coordinate, since 2 lines in space intersect only trough one point.
This seemed to work great, we could track the copter easily when moved him slow, but when we triend it with the flying copter we saw that the motes where sometimes giving incorrect values causing our copter to crash.
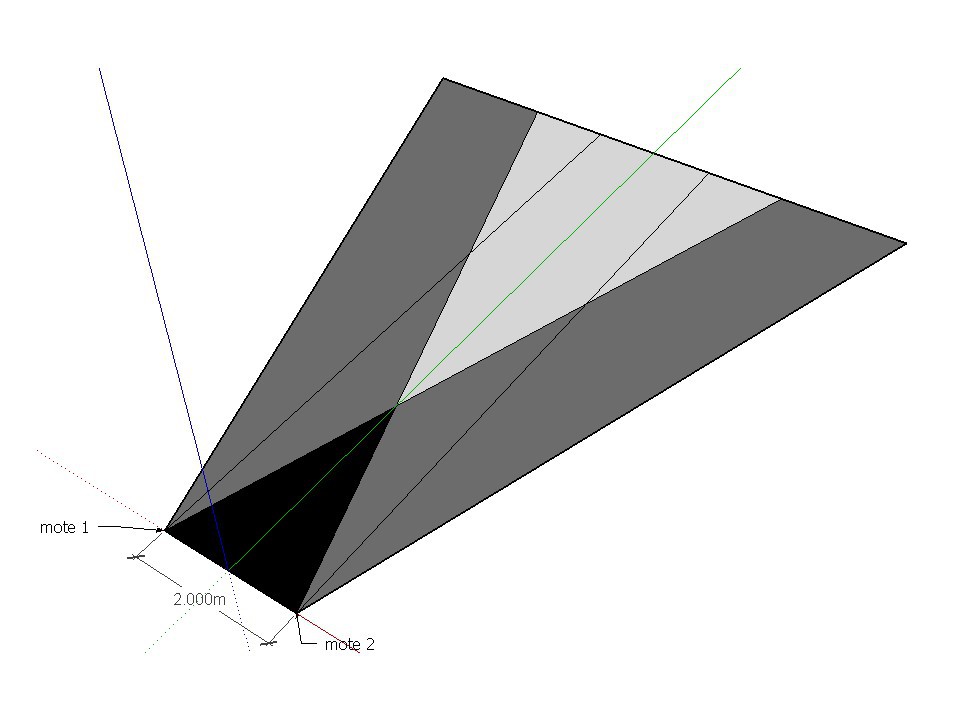
With stereo vision there are 4 zones:
- First is outside everyones range, you don't want to be there
- Seccond is the blind spot (marked black). Like the first, you don't want to be there.
- Third is the gray area. This is the field where you are seen by only one mote. This could be used to get you back to forth place, since we have a clue of where you are.
- Last is the light gray area, this is where we have stereo vision.
Since the motes are on one line we can say that the y value are the same, practical we take the average.
For the z and x value we use the x value off the motes and draw a mental line between the mote center and the point they see.
Those two lines intersect eachother and that intersection is our x and z value.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.