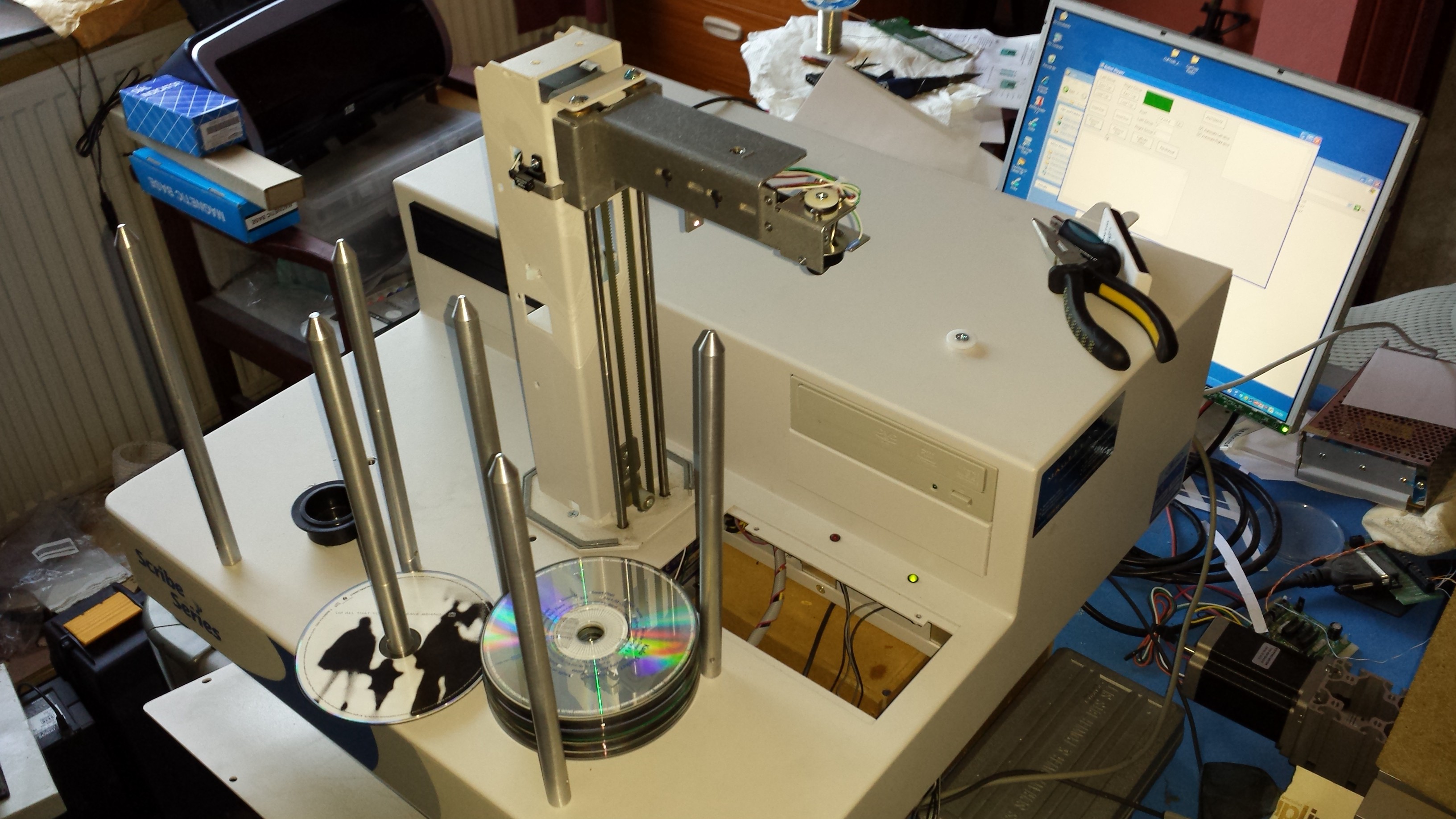
At work, in storage for years, sat an MF Digital Scribe. A huge lump of metal with a PC built into the back, a bulky Inkjet printer on top for labelling disks automatically, plus some really dangerous looking metal spikes for 'containing' the disks.

You don't want to get drunk around this monstrosity and impale yourself on one of it's spikes.
So I pleaded with my boss to allow me to take it home and fix it up, for the very purpose of digitising my entire CD audio collection to MP3.
Just two weeks ago at time of writing I got authorisation to de-asset it and lug it home!
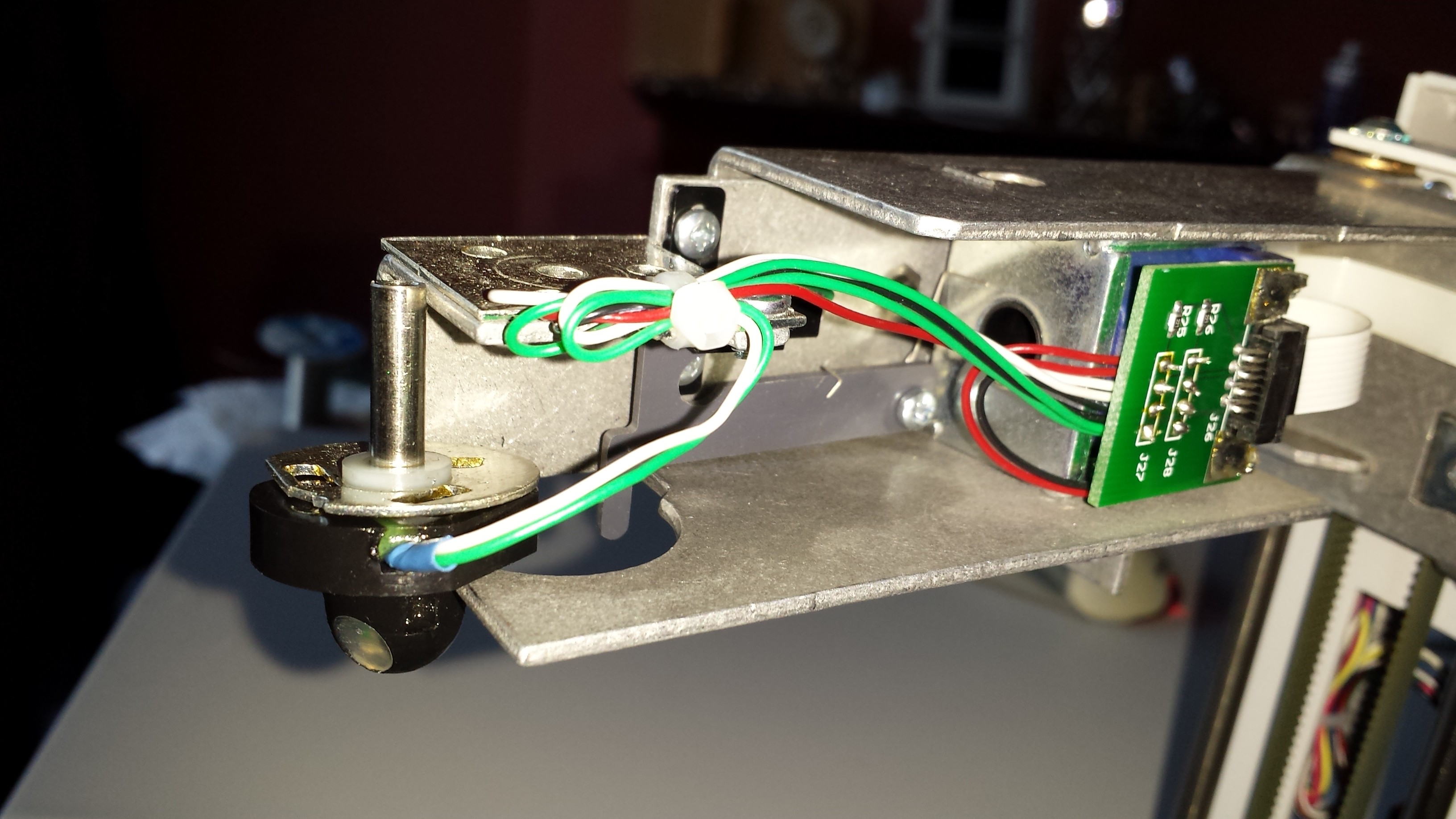
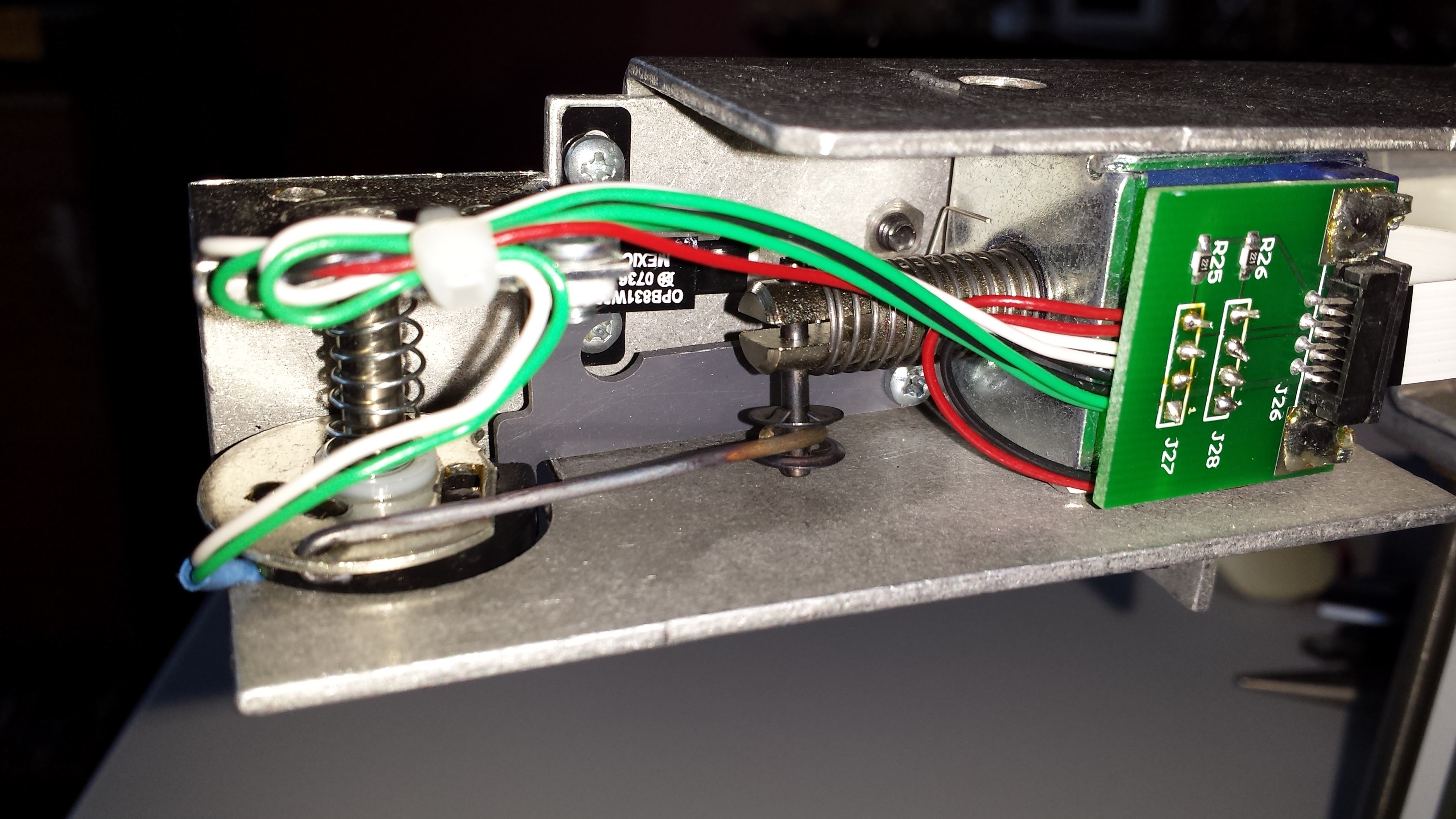
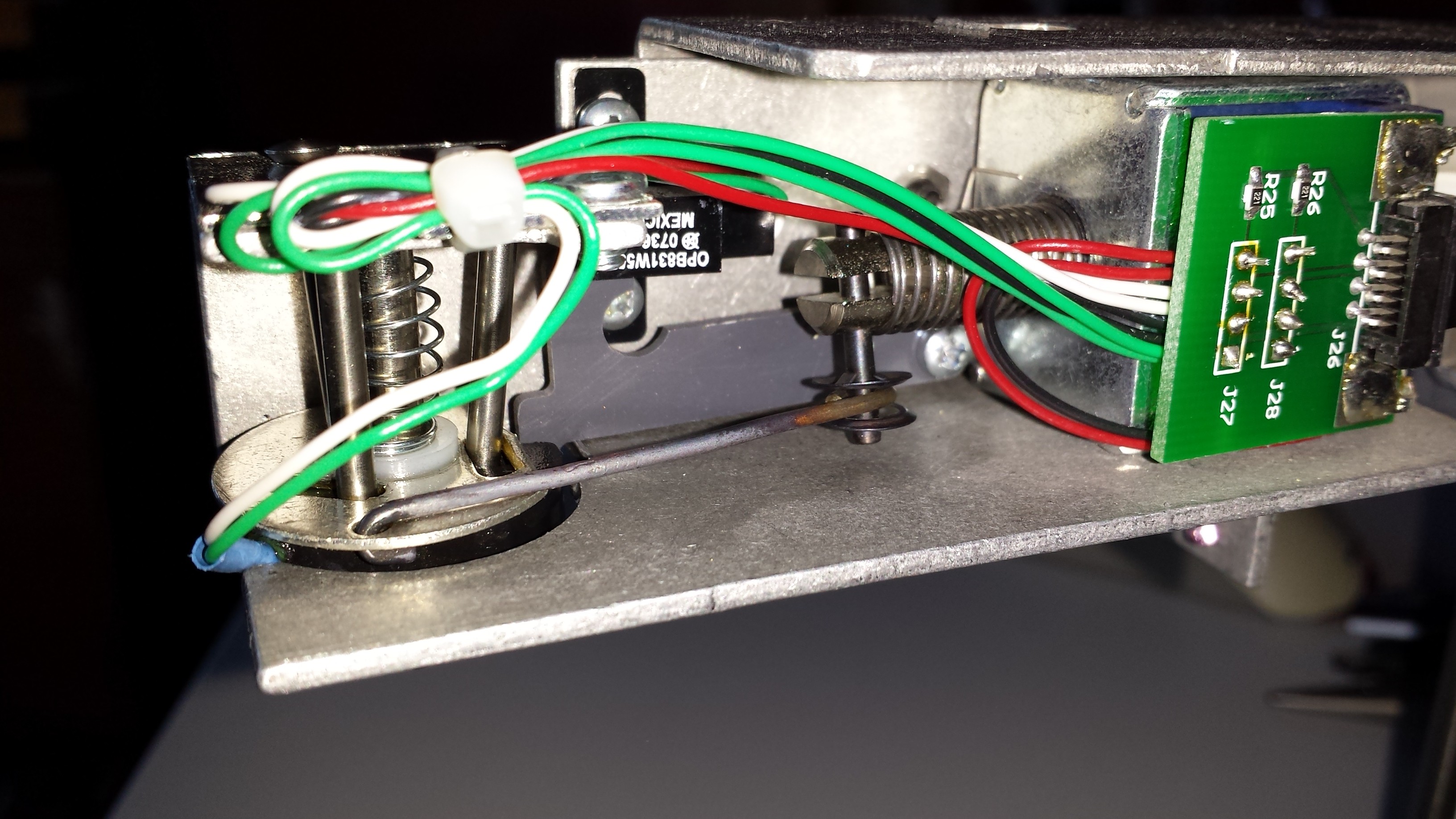
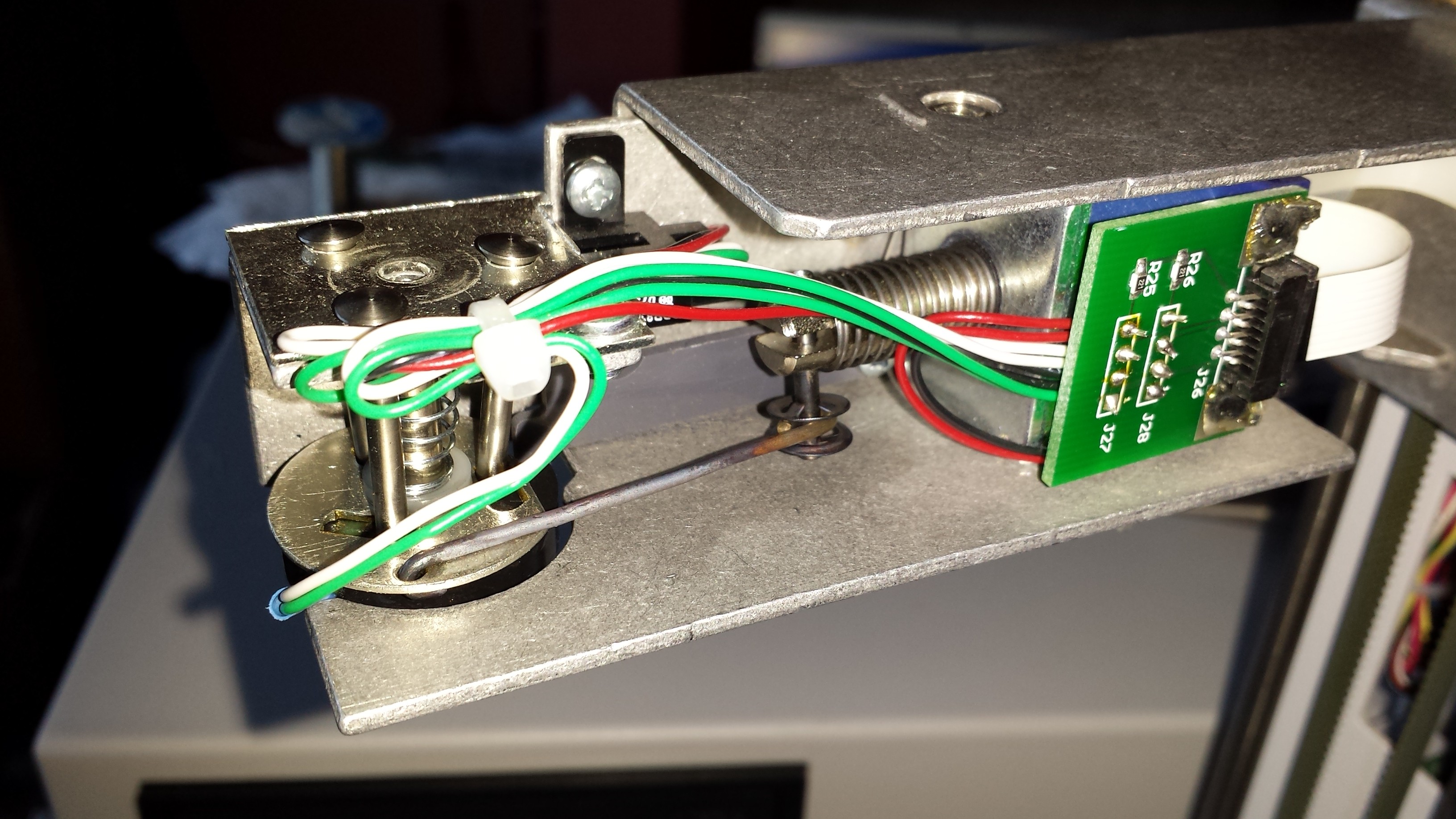
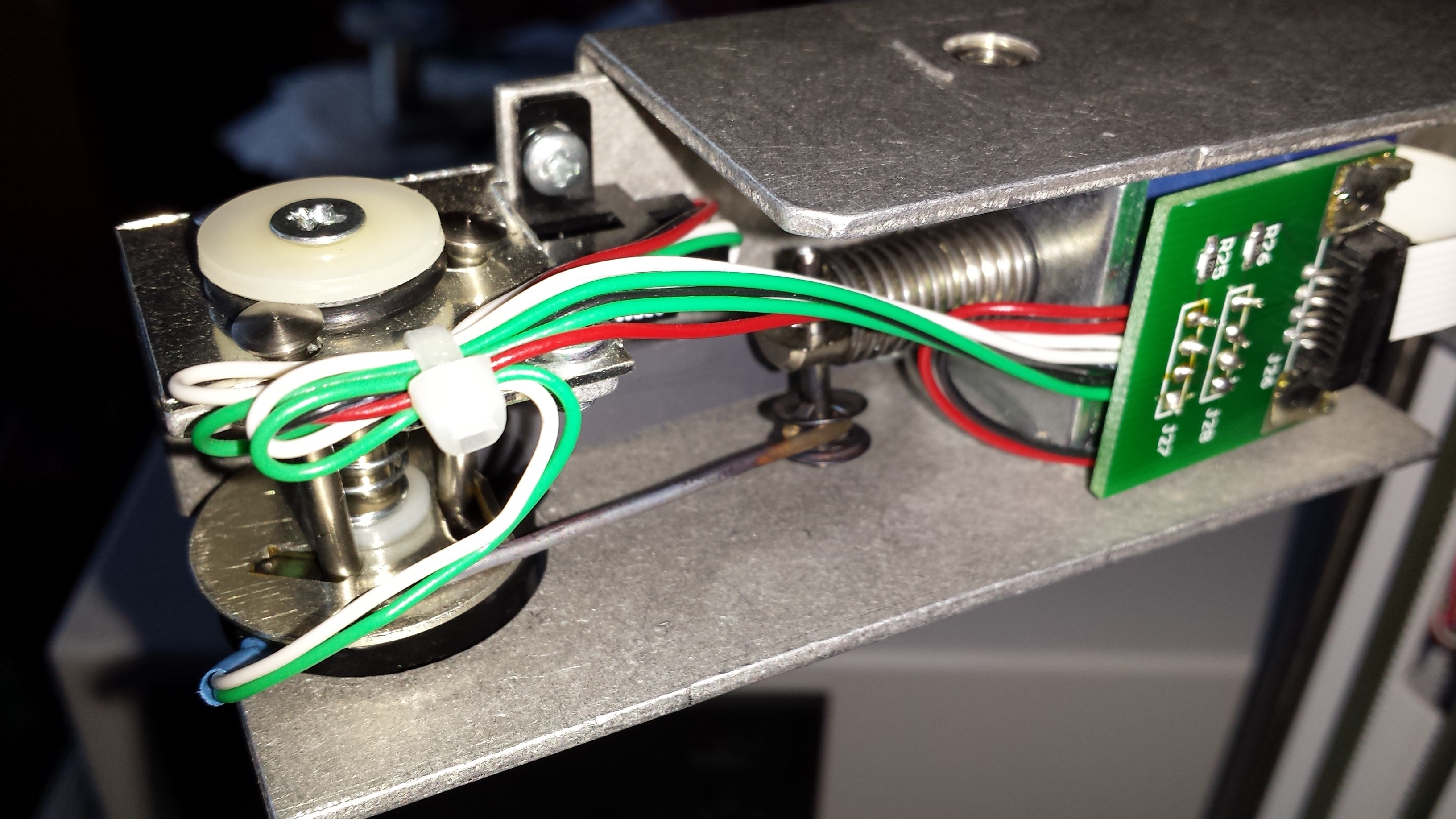
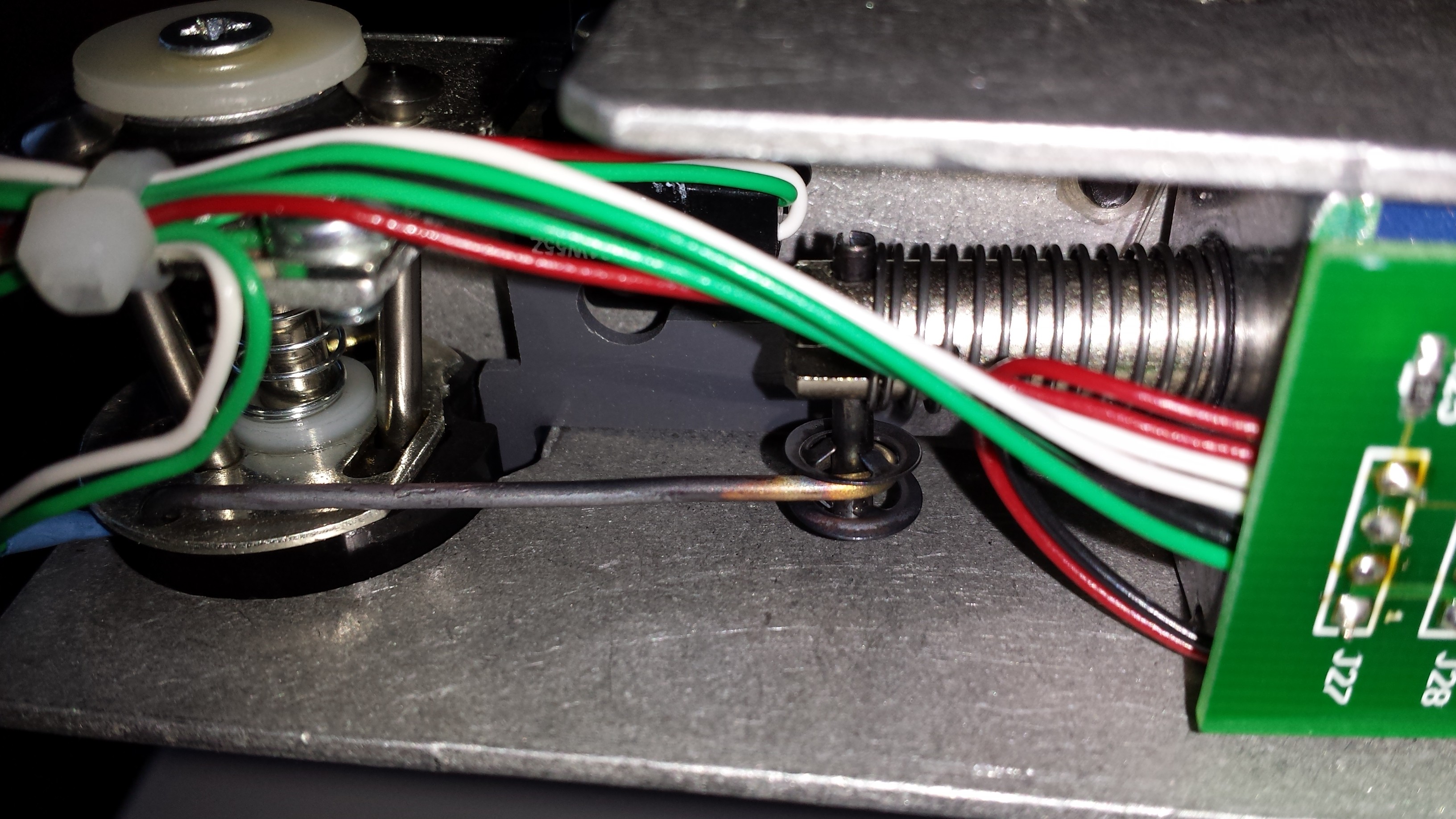
It's around 2007-2008 built, had a bad picker mechanism, of which was the sole component I wanted to be able to salvage! :-( I didn't even know whether the thing would even articulate at all, and I had thoughts of having to strip it down and build something else up out of its bits - luckily not necessary.
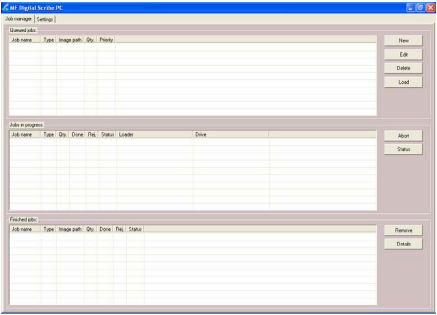
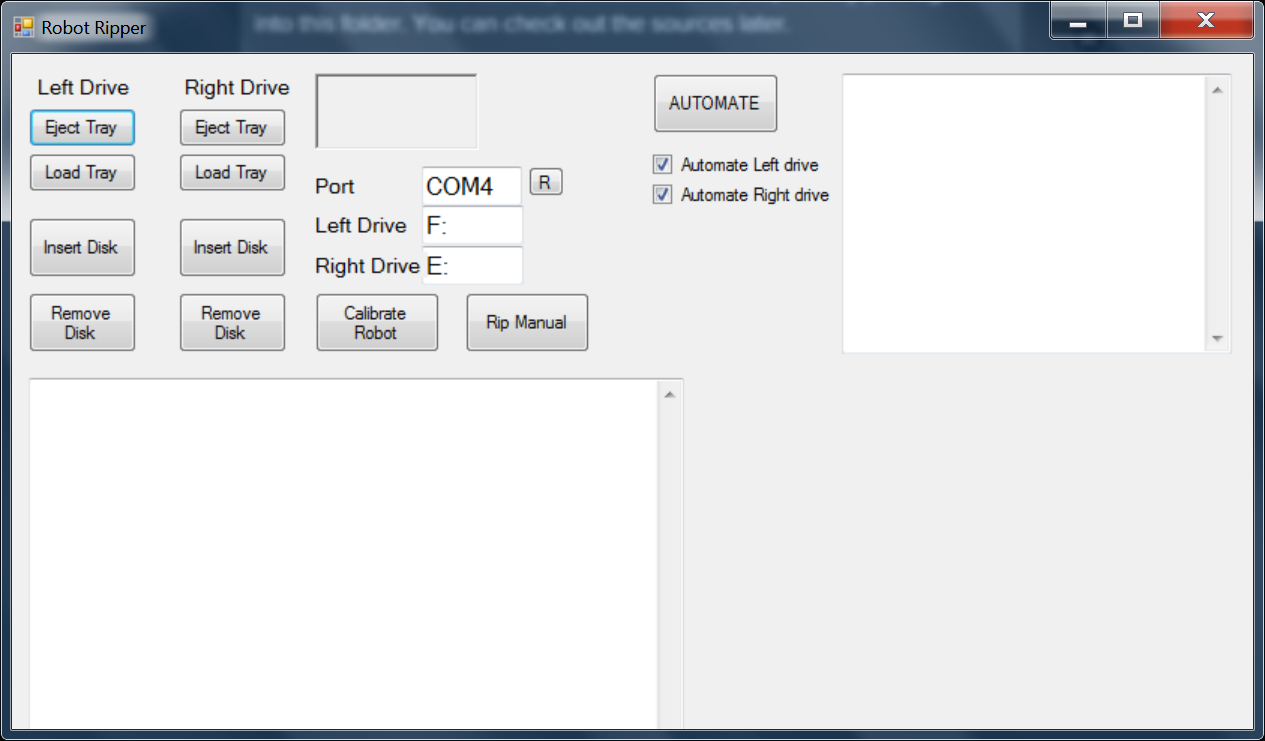
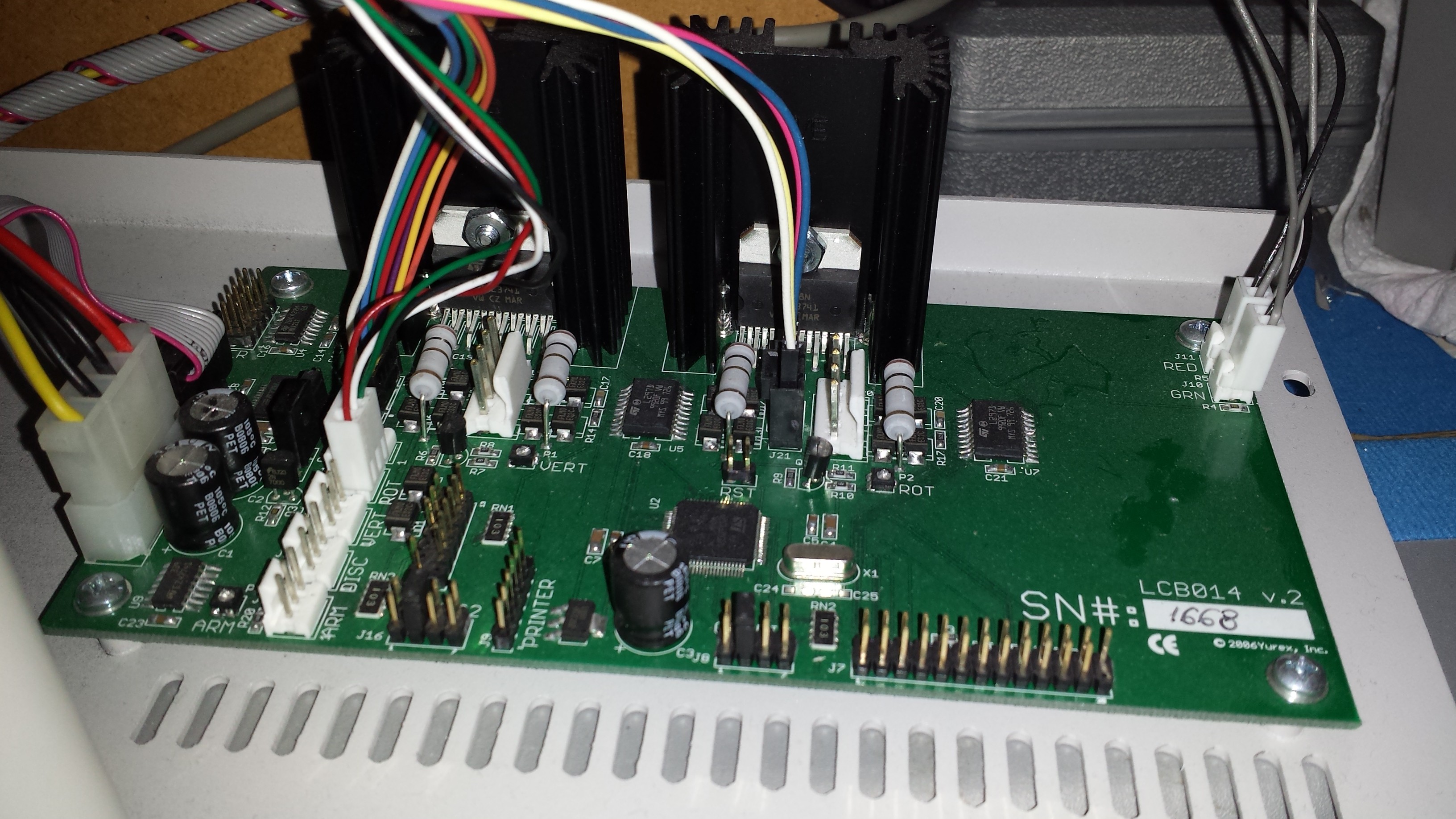
I knew it only had software for burning images to disk, or taking ISO images, and also for printing on blank CDs with the Inkjet. This meant I had to come up with some custom software to get it to automate the entire ripping process, but how could I bend it to my will?
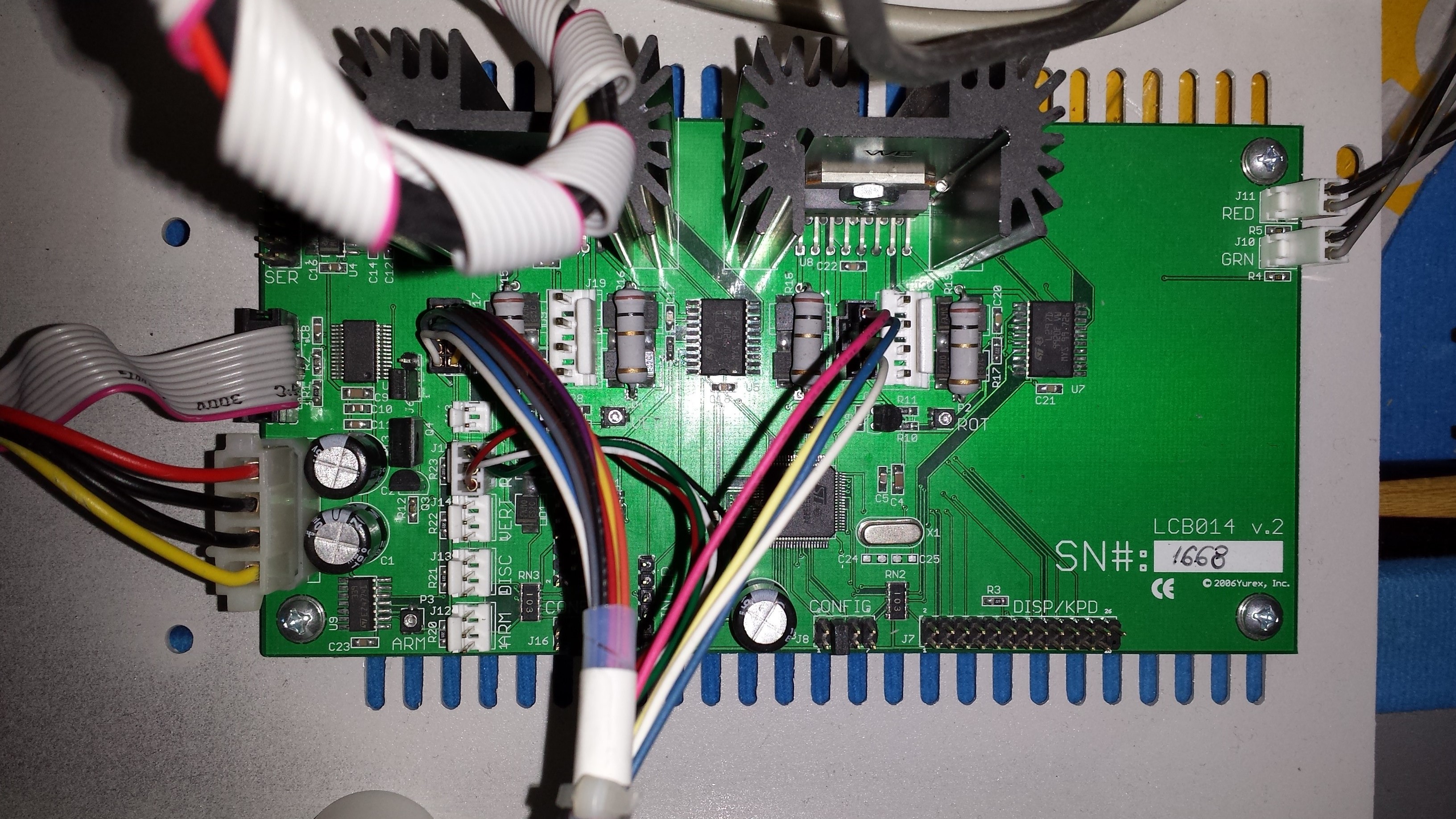
This meant (and will still mean) some serious investigation / re-development. Not only from a software perspective, as the first job was to determine how to fix up the grabber mechanism, or even figure out how it all worked and hung together!
Read on for my break down to date, and will be continued, as this is still on-going as I'm still ironing out some bugs as I capture more and more CDs.





 Rudolph
Rudolph
 Joshua Elsdon
Joshua Elsdon
 Jon Steel
Jon Steel
 Dan Royer
Dan Royer
The [code] for improving console ripper seems to have disappeared. Any chance you could re-post?