 Gabriel Staples
Gabriel StaplesI plan to use 5 Arduinos, or similar, to trilaterate 3D position using ultrasonic sound waves. 4 will be "satellites" (3 for X-Y trilateration), and 1 for altitude, and 1 will be a "receiver." I plan for the application size to be at most the size of a soccer field. An ultrasonic "chirp" or ramp technique can probably be used to avoid problems of background noise. Primary applications may likely be indoors. One example could be an indoor quadrotor flight lab. I have written a half-dozen pages of documentation on how I think I can go about the implementation details. I expect accuracy to be <1", and resolution to be on the order of 1/10". There are several approaches to this problem, but I am planning on approaching the problem using a time-synchronization technique which will allow an unlimited number of receivers, without causing any burden upon the "satellite" transmitters.
Possible primary hardware for sampling, acoustic control, & processing includes:
- Teensy 3.1
- Arduino Uno/Nano/Pro Mini, etc (ATmega328 AVR)
- Arduino Zero/Neutrino (high-speed ARM-core mcu)
- Arduino Due
- Maple Mini mcu (72Mhz 32-bit, <$5 on ebay)
- Raspberry Pi
Planned RF24 digital communication modules, for time-syncing & wireless comms between nodes: nRF24L01+






 igorfonseca83
igorfonseca83
 Zerynth
Zerynth
 lumbric
lumbric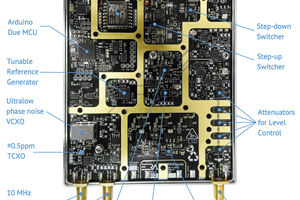
 edensrock
edensrock
About wiring, etc.:
- Surely, it must be wireless: https://marvelmind.com/pics/architectures_comparison.pdf
- One of the greatest disadvantages of UWB, for example, that is not obvious, is that the anchors typically require PoE for power because they are power-hungry and Ethernet for the connectivity - it is complex and costly
- Wireless in a license-free 915/868 MHz perfectly works for clock synchronization, data exchange, and telemetry in our case - ultrasound. It wouldn't work UWB though
Other comments - about analog, ARM M4, etc., are very valid. We use DSP based on STM32. Analogue-based systems are too limited. There are a lot of things behind the curtain to make it work well. Doable. But not a one-week project :-)