 Leon Bataille
Leon BatailleClick on one of the following Links to navigate through the project page:
| All Project Logs | All CAN Codes |
| Project Page @ Seeed Studios | Silas Parker's Blog |
| YouTube Channel | YouTube Playlist |
| Download Center | Sources |
| Supporters and Sponsors |
See the project in action:
German demonstration: http://youtu.be/BZKrnzsYgRA





















 Lee Sampson
Lee Sampson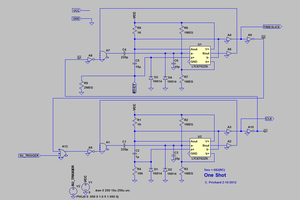
 C. Prichard
C. Prichard
 Hari Wiguna
Hari Wiguna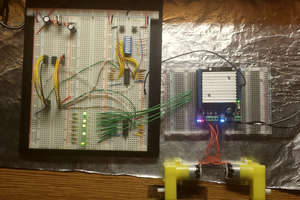
Hey Leon,
I have seen a wiring diagram for the engine temperature and the fuel gauge on a photo.
Can we see this circuit diagram in more details?? Thanks :)