 Gabor Horvath
Gabor HorvathWe need a lawnmower which is can cut the higher weed also.
The conception about a 2+1 wheeled cutter.
- Vertical cutter
- 3D local positioning
- Wifi controll
- automatic recharging
from scratch ...
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
We need a lawnmower which is can cut the higher weed also.
The conception about a 2+1 wheeled cutter.
- Vertical cutter
- 3D local positioning
- Wifi controll
- automatic recharging
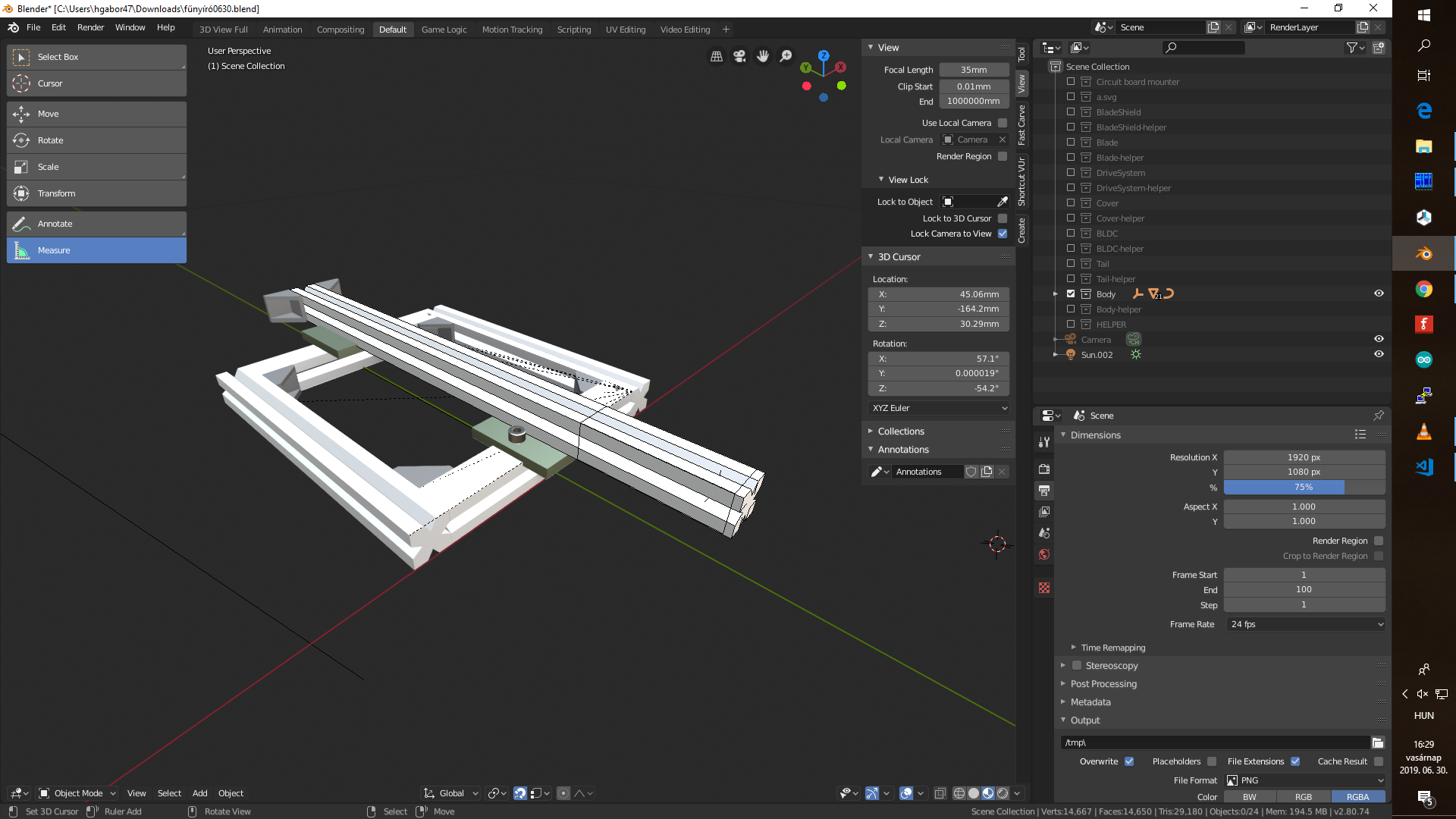
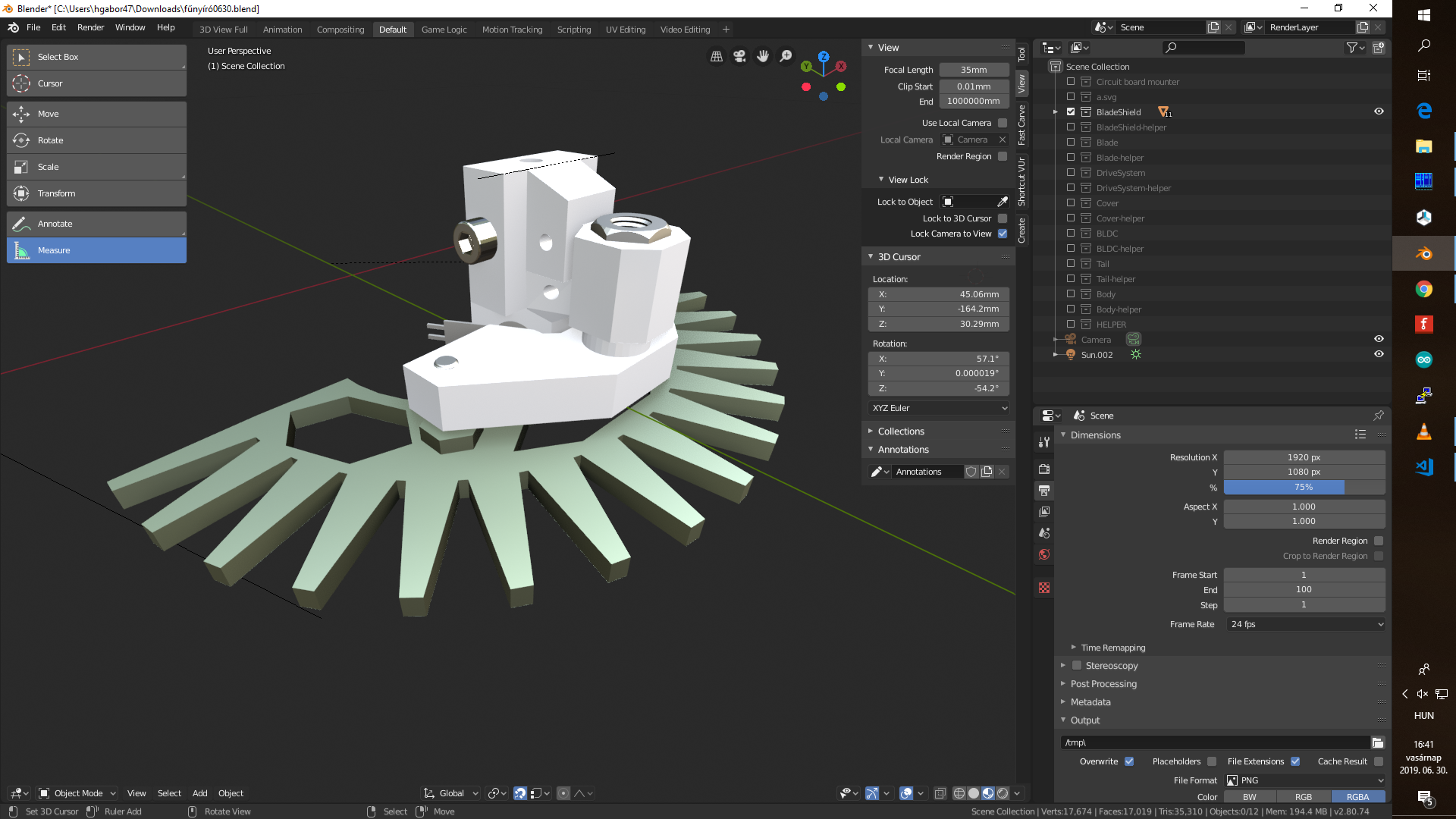
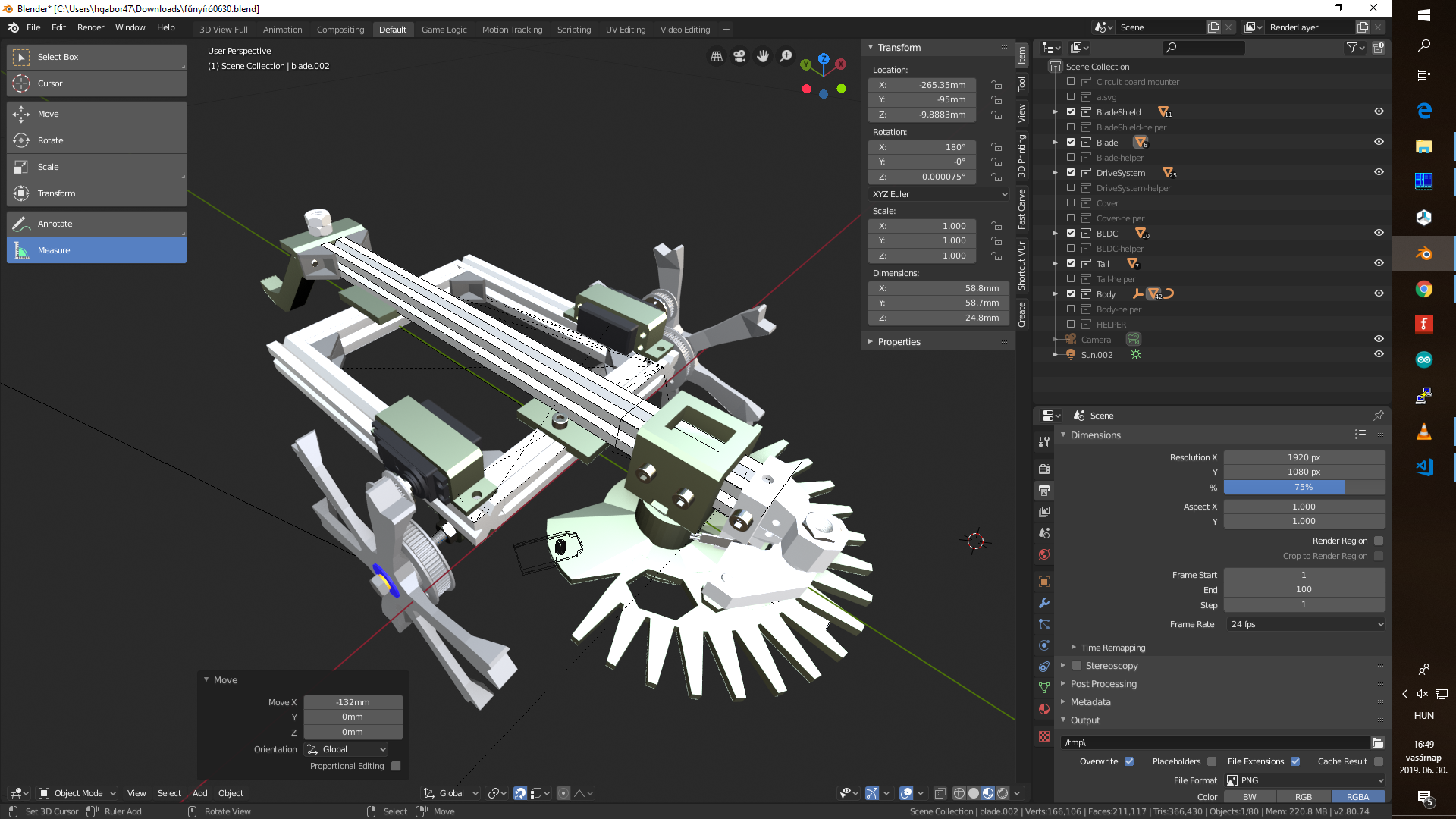
The ROBOScythe almost ready for use.
The new design based on VSLOT 20x20 extruded aluminium
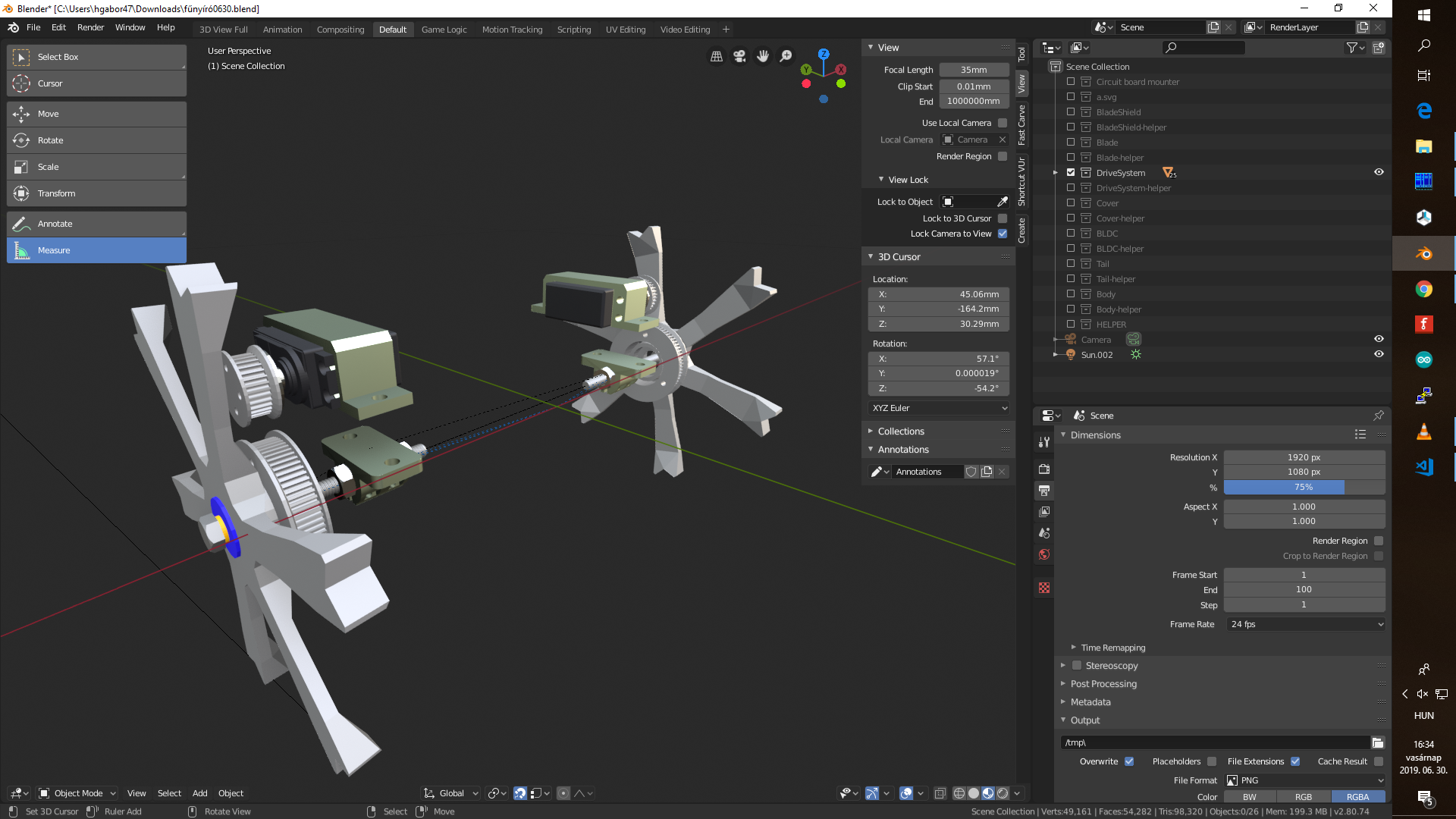
The drive system based on two MG996 servos and GT2 pulleys. Side effect: I created a GT2 Pulley pack on Thingiverse.
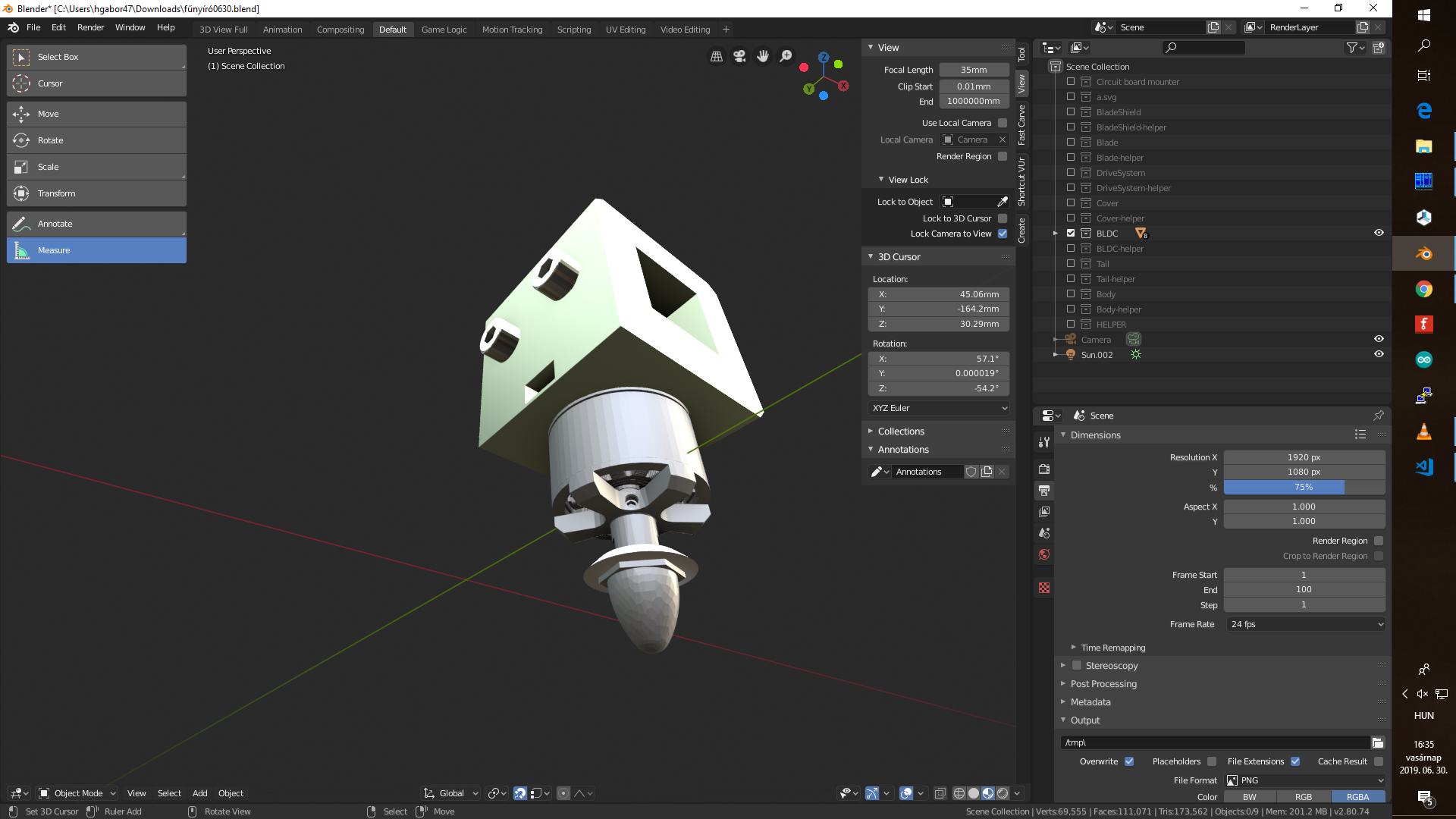
The cutting equipment based on a BLDC motor. ( +ESC )
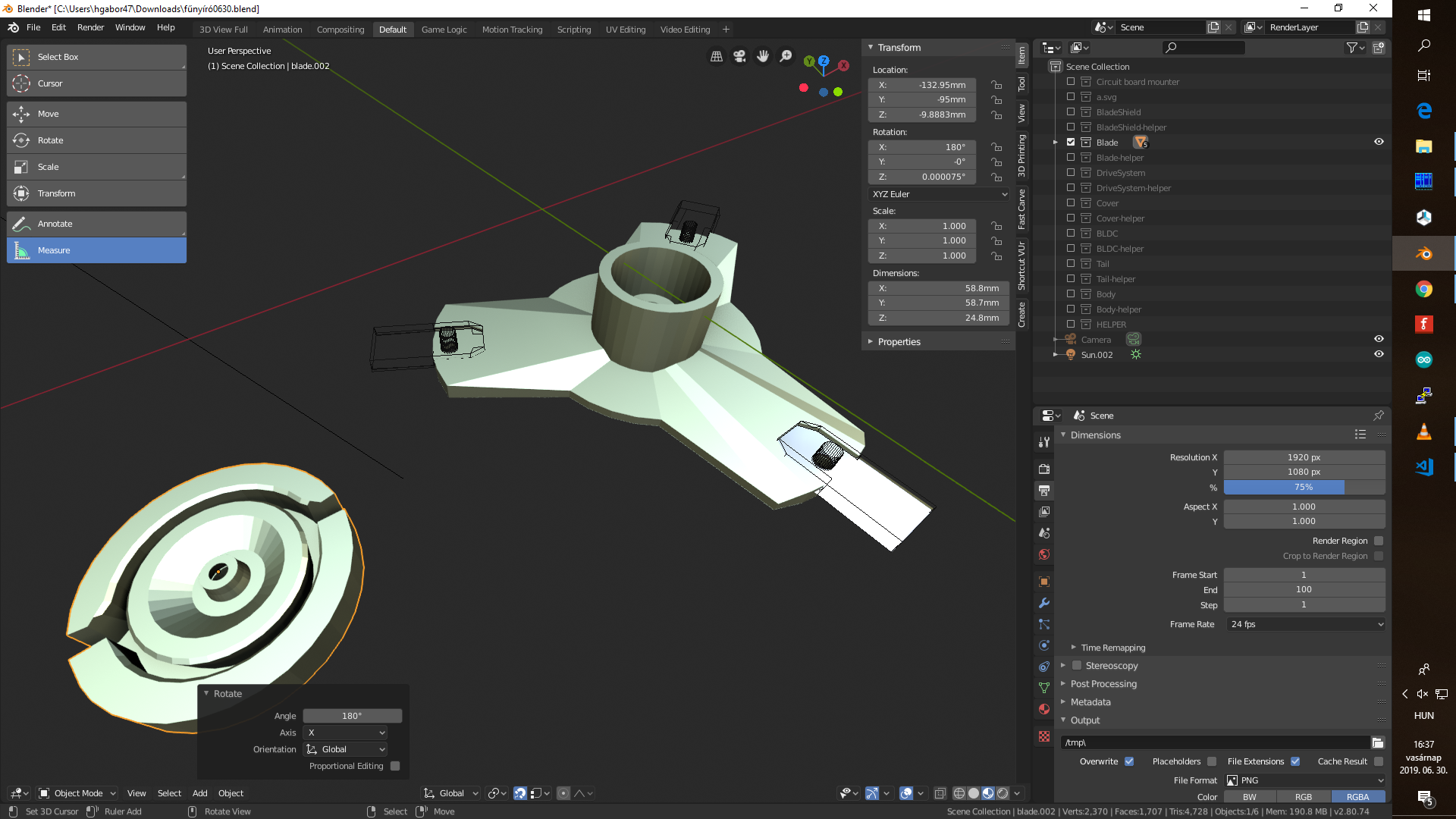
The blade has three wings with Robotic lawnmower razors (from OBI). You can use damilhead optionally
The ROBOScythe blade has a shield. And this shield built it with two pressure sensors.
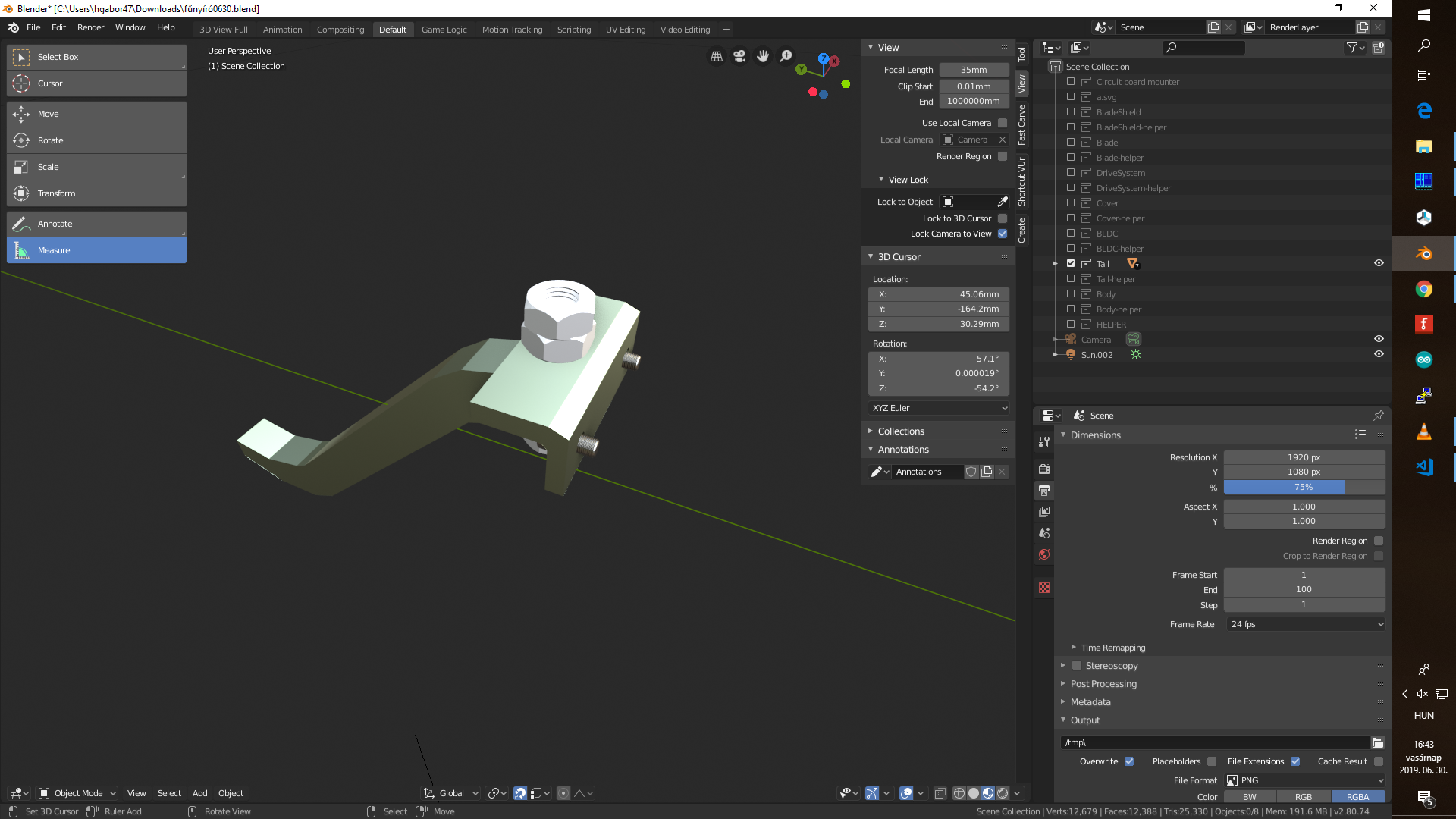
The third "gear" is a tail and stabilizes the device.
And that's all together.

Hi, my main problem - what I recognise in lawnmower concepts - the jam and the bottom mounted rotating blades can't cut the higer grass and weeds.
So, This lawnower will walk slowly and all days, and the hair-clippers format can cut the higher grasses without jam and without human help.
My hair-clippers concept imagined with horizontal vibration (not exactly than the attached image)

Do you think it might be safer to get rid of the rotating blades and instead duplicate the same concept used in electric hair clippers? http://businessfromhome.jasongregory.biz/en/video/dJU08S7Nx-E/How-stuff-works-Electric-motors-for-electric-shavers-rules-of-thermodynamics


 Hákon Hjaltalín
Hákon Hjaltalín
 barb
barb
 Alessio Fabrizio
Alessio Fabrizio
 Alex Anderson
Alex Anderson
I restarted the project and I have a new design.