 @TaiksonTexas
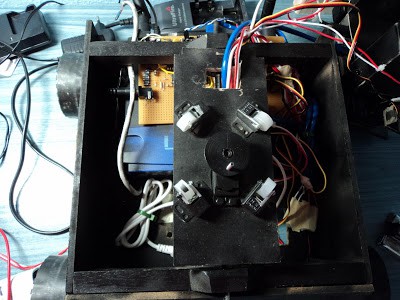
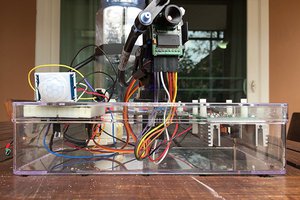
@TaiksonTexasTexas ranger is a differential traction vehicle made from wood pieces and plastic toy wheels.
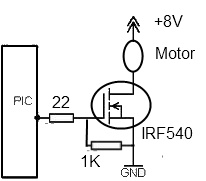
It has a 2-degree-of-freedom turret mounted on top, that holds an ip camera, a laser pointer and, two PVC automatic cannons, made with two cheap gun toys mounted backwards and drived by two MOSFET. Turrent is 1-degree-of-freedom self-compensated inclination, measured by Wii nunchuck.
The
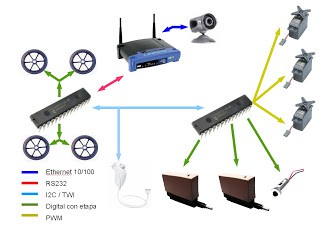
vehicle is operated with a Linksys WRT54G, OpenWRT loaded. The router
is connected via ethernet to the IP Camera and via serie to a home
made board with two 16F876 PICs. The board controls motors for
differential traction, Wii nunchuck reading and turret
self-compensation is calculated on PIC and notified to router via
RS232.
Laser ponter is used to project the dot in landscape, in order to estimate the distance to targeted object, via triangulation. A C program, executed in the router, downloads every frame from ip camera, decompress the JPEG stream using libjpeg, and finds the most brighness dot inside a pre-defined region of the image.
Assuming that this is the laser dot, and calculating the amount of pixels from the dot to the image border, estimating the real distance to target, and showing it in the web page.
Remote control works as an another URL of the router web configuration. User send commands as the same way as he would play Quake or CS, by 'w', 'a', 's', 'd' keystrokes, and mouse movements and click for turrent movement, canon shooting and distance measurement.




















 vedanshi.shah
vedanshi.shah
 Ryan Bailey
Ryan Bailey
 Joshua Cho
Joshua Cho{kind=link}
{kind=link}